1. Сигналы бедствия, срочности и безопасности
1.1 Сигналы бедствия, срочности и сообщение о бедствии передаются по указанию капитана судна.
1.2 В случае, когда судно терпит бедствие и требует помощи, сигналы бедствия и срочности передаются и принимаются с использованием всех имеющихся на борту судна радиосредств.
1.3 В случае возникновения аварийной ситуации капитан (вахтенный начальник) судна обязан вызывать ближайшие суда на 5-м канале, а при невозможности установления связи вызывать ближайшую береговую станцию на присвоенном ей канале.
4.4 Ни одно из положений настоящих Указаний не может служить препятствием к использованию радиостанцией терпящего бедствие судна всех имеющихся возможностей для установления связи с ближайшими судами или береговыми пунктами для передачи сообщений о бедствии и запроса помощи.
2. Передача прогнозов погоды, путевой информации и циркулярных сообщений
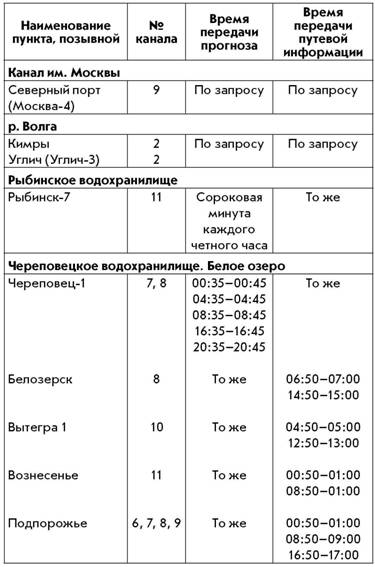
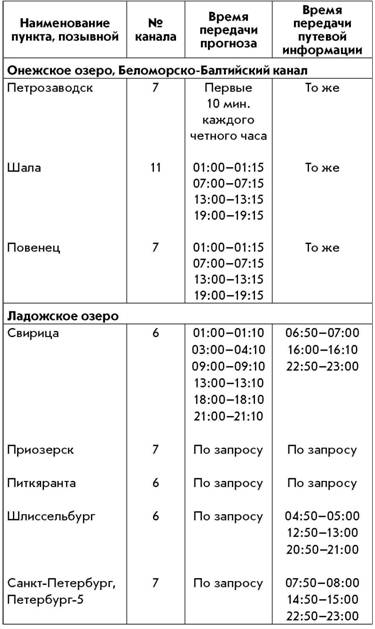
Передача прогнозов погоды, предупреждений и путевой информации осуществляется по установленному расписанию на выделенных для этого каналах и в соответствии с таблицей (см. Приложение 2).
3. Служебная радиосвязь
3.1 В период плавания главная радиостанция должна быть постоянно включена на 5-м канале (300,2 МГц). Частота 300,2 МГц является частотой бедствия, безопасности и вызова для радиотелефонии на внутренних водных путях страны. Ведение переговоров на 5-м канале, не связанных с вопросами обеспечения безопасности, ЗАПРЕЩАЕТСЯ.
3.2 Переговоры с диспетчерским персоналом портов, пристаней, гидроузлов и других береговых объектов должны осуществляться на закрепленных за ними частотах.
3.3 Перед вызовом радиостанции предварительным прослушиванием на канале вызываемой радиостанции необходимо убедиться в том, что она не ведет радиообмен с другой радиостанцией, и лишь после этого сделать вызов.
3.4 Радиосвязь должна осуществляться с соблюдением Правил ведения радиотелефонных переговоров по каналам радиосвязи на внутренних водных путях России, а переговоры носить четкий и лаконичный характер.
При ведении радиообмена применяются позывные, в качестве которых используются названия судов или названия шлюзов: «Теплоход «Рыбинск», «Яхта», «Вега», «Шлюз №1» , «Петрозаводск-Радио» и т.д. Например, вызов диспетчера шлюза №1 звучит так: «Шлюз №12, я яхта «Вега», прием.
Если диспетчер принял вызов, то он отвечает: «Вега», я «Шлюз №1», вас слышу хорошо, прием. После этого могут быть проведены переговоры о порядке прохождения шлюза. Аналогичный порядок установлен и для связи и с судами на 5-м канале.
При аварии судна передается сигнал бедствия на 5-м канале (а при отсутствии связи – на каналах береговых радиостанций), состоящий из:
– слова «БЕДСТВИЕ», передаваемого три раза;
– слова «ГОВОРИТ», передаваемого один раз;
– названия судна, терпящего бедствие, передаваемого три раза.
Сигнал бедствия и сообщение о бедствии следует передавать до тех пор, пока оно не будет получено подтверждение о приеме.
Сигнал бедствия по очередности пользуется абсолютным приоритетом перед другими сигналами. Все другие радиостанции, принявшие сигнал бедствия, должны немедленно прекратить любые передачи, которые могут создать помехи радиообмену по оказанию помощи терпящему бедствие.
За сигналом бедствия передается сообщение о бедствии, состоящее из сведений о характере бедствия, местонахождении судна, требуемой помощи и любых других сведений, способствующих уяснению положения судна для оказания ему помощи.
Помимо сигналов бедствия, к приоритетным относятся сигналы срочности и безопасности, передаваемые также на 5-м канале.
Сигнал срочности указывает, что вызывающая радиостанция имеет для передачи срочное сообщение, касающееся безопасности судна или какого-либо человека, находящегося на нем или видимого с него.
Сигнал безопасности говорит о том, что данная радиостанция будет передавать сообщения, касающиеся безопасности плавания, важные гидрометеорологические сведения или изменения в судоходной обстановке.
На внутренних водных путях всем радиостанциям запрещается:
– работать на неразрешенных каналах;
– использовать не присвоенные позывные сигналы;
– устанавливать связь и производить обмен с неразрешенными береговыми корреспондентами, за исключением радиостанций судов, терпящих бедствие;
– увеличивать мощность радиопередатчиков сверх указанной в разрешении на эксплуатации;
– применять произвольные коды и сокращения.
Средства радиосвязи
ПРИЛОЖЕНИЕ
Береговые радиостанции, ведущие наблюдение за сигналами бедствия

Расписание береговых радиостанций, передающих прогнозы погоды, предупреждения и путевую информацию

Связь на море
СУДОВЫЕ РАДИОЛОКАТОРЫ ДЛЯ МАЛОМЕРНОГО ФЛОТА
Принцип работы радиолокатора
Основные характеристики радаров
Интегральные навигационные системы
1.1 Сигналы бедствия, срочности и сообщение о бедствии передаются по указанию капитана судна.
1.2 В случае, когда судно терпит бедствие и требует помощи, сигналы бедствия и срочности передаются и принимаются с использованием всех имеющихся на борту судна радиосредств.
1.3 В случае возникновения аварийной ситуации капитан (вахтенный начальник) судна обязан вызывать ближайшие суда на 5-м канале, а при невозможности установления связи вызывать ближайшую береговую станцию на присвоенном ей канале.
4.4 Ни одно из положений настоящих Указаний не может служить препятствием к использованию радиостанцией терпящего бедствие судна всех имеющихся возможностей для установления связи с ближайшими судами или береговыми пунктами для передачи сообщений о бедствии и запроса помощи.
2. Передача прогнозов погоды, путевой информации и циркулярных сообщений
Передача прогнозов погоды, предупреждений и путевой информации осуществляется по установленному расписанию на выделенных для этого каналах и в соответствии с таблицей (см. Приложение 2).
3. Служебная радиосвязь
3.1 В период плавания главная радиостанция должна быть постоянно включена на 5-м канале (300,2 МГц). Частота 300,2 МГц является частотой бедствия, безопасности и вызова для радиотелефонии на внутренних водных путях страны. Ведение переговоров на 5-м канале, не связанных с вопросами обеспечения безопасности, ЗАПРЕЩАЕТСЯ.
3.2 Переговоры с диспетчерским персоналом портов, пристаней, гидроузлов и других береговых объектов должны осуществляться на закрепленных за ними частотах.
3.3 Перед вызовом радиостанции предварительным прослушиванием на канале вызываемой радиостанции необходимо убедиться в том, что она не ведет радиообмен с другой радиостанцией, и лишь после этого сделать вызов.
3.4 Радиосвязь должна осуществляться с соблюдением Правил ведения радиотелефонных переговоров по каналам радиосвязи на внутренних водных путях России, а переговоры носить четкий и лаконичный характер.
При ведении радиообмена применяются позывные, в качестве которых используются названия судов или названия шлюзов: «Теплоход «Рыбинск», «Яхта», «Вега», «Шлюз №1» , «Петрозаводск-Радио» и т.д. Например, вызов диспетчера шлюза №1 звучит так: «Шлюз №12, я яхта «Вега», прием.
Если диспетчер принял вызов, то он отвечает: «Вега», я «Шлюз №1», вас слышу хорошо, прием. После этого могут быть проведены переговоры о порядке прохождения шлюза. Аналогичный порядок установлен и для связи и с судами на 5-м канале.
При аварии судна передается сигнал бедствия на 5-м канале (а при отсутствии связи – на каналах береговых радиостанций), состоящий из:
– слова «БЕДСТВИЕ», передаваемого три раза;
– слова «ГОВОРИТ», передаваемого один раз;
– названия судна, терпящего бедствие, передаваемого три раза.
Сигнал бедствия и сообщение о бедствии следует передавать до тех пор, пока оно не будет получено подтверждение о приеме.
Сигнал бедствия по очередности пользуется абсолютным приоритетом перед другими сигналами. Все другие радиостанции, принявшие сигнал бедствия, должны немедленно прекратить любые передачи, которые могут создать помехи радиообмену по оказанию помощи терпящему бедствие.
За сигналом бедствия передается сообщение о бедствии, состоящее из сведений о характере бедствия, местонахождении судна, требуемой помощи и любых других сведений, способствующих уяснению положения судна для оказания ему помощи.
Помимо сигналов бедствия, к приоритетным относятся сигналы срочности и безопасности, передаваемые также на 5-м канале.
Сигнал срочности указывает, что вызывающая радиостанция имеет для передачи срочное сообщение, касающееся безопасности судна или какого-либо человека, находящегося на нем или видимого с него.
Сигнал безопасности говорит о том, что данная радиостанция будет передавать сообщения, касающиеся безопасности плавания, важные гидрометеорологические сведения или изменения в судоходной обстановке.
На внутренних водных путях всем радиостанциям запрещается:
– работать на неразрешенных каналах;
– использовать не присвоенные позывные сигналы;
– устанавливать связь и производить обмен с неразрешенными береговыми корреспондентами, за исключением радиостанций судов, терпящих бедствие;
– увеличивать мощность радиопередатчиков сверх указанной в разрешении на эксплуатации;
– применять произвольные коды и сокращения.
Средства радиосвязи
Все радиостанции, устанавливаемые на судах, плавающих на внутренних водных путях, должны обязательно иметь Допуск Российского Речного Регистра и Сертификат Министерства связи независимо от их принадлежности и от того, являются ли эти радиостанции главным либо дополнительным оборудованием.
В настоящее время появилось достаточно много компактных судовых радиостанций, способных разместиться на малых судах с ограниченным объемом внутренних помещений и энергоемкостью источников электропитания. К их числу относятся изготовленные в России специально по требованиям Речного Флота носимая радиостанция «Гранит-44» и стационарная (судовая) «Гранит Р-24», а также адаптированные радиостанции Tait 2000 («Радиома-300») и Saracom BS-80, носимые Tait T-5020 и Saracom TW-80. Все представленные радиостанции имеют допуск Российского Речного Регистра.
Ниже приведены краткие описания всех перечисленных радиостанций.
«Гранит Р-44»
Первая компактная носимая ДЦВ радиостанция речного флота (рис. 63), выполненная на современном уровне. Имеет все речные каналы (16 симплексных и 12 дуплексных) в диапазонах 300,0125– 300,5125 МГц и 336,0125– 336,5125 МГц. Очень удобна в эксплуатации – управление ее работой осуществляется с помощью нескольких кнопок, а для контроля каналов и состояния станции имеется небольшой жидкокристаллический дисплей. Может использоваться для работы в дуплексных каналах при использовании двухчастотного симплексного режима. В комплект поставки входят штатная антенна, аккумуляторная батарея, зарядное устройство и кожаный чехол. Для использования радиостанции в стационарном режиме дополнительно поставляются адаптер для питания от источников постоянного тока 12,6 В или 24 В, манипулятор (громкоговоритель/микрофон с переключателем прием/передача), выносная антенна с кабелем. Радиостанция имеет Допуск Речного Регистра РФ.

Рис. 63. Носимая радиостанция «Гранит Р-44»
MotorlaGP340
Носимая радиостанция производства известной американской фирмы Motorola (рис. 64). В отличие от радиостанции «Гранит Р-44», имеет только 16 каналов (номера каналов могут устанавливаться по желанию покупателя). Из-за отсутствия дисплея выбор каналов осуществляется по таблице соответствия, находящейся на передней части радиостанции, что достаточно неудобно, особенно в темноте.
SaracomTW-80
Адаптированная к требованиям Российского Речного Регистра носимая радиостанция производства корейской компании Saracom (рис. 65). В своем прошлом это была радиостанция для аварийно-спасательных средств, поэтому, по сравнению с другими радиостанциями обладает повышенной водостойкостью – выдерживает краткосрочное погружение в воду. Как и «Гранит Р-44» имеет набор опций, позволяющих использовать ее как стационарную.

Рис. 64. Носимая радиостанция Motorola GP-340

Рис. 65. Носимая радиостанция TW-80
TaitT-5020
Носимая УКВ радиостанция производства новозеландской компании Tait. Имеет все частотные каналы, жидкокристаллический дисплей (рис. 66).
«Гранит Р-24»
Стационарная ДЦВ радиостанция, специально разработанная для судов речного флота (рис. 67). Состоит из нескольких блоков – приемопередатчика, преобразователя напряжения 220/24/12 В (для судов с бортовой сетью 12 В блок не нужен), антенны. Работает на всех частотных каналах. Единственная радиостанция, предоставляющая возможность использовать ее из двух разнесенных постов управления. Штатная антенна радиостанции заземлена по постоянному току, что обеспечивает защиту радиостанции от грозовых разрядов и статического электричества.

Рис. 66. Носимая радиостанция Т-5020
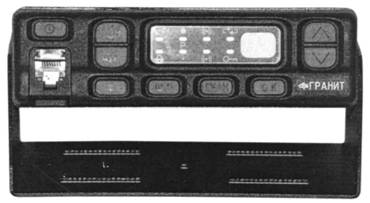
Рис. 67. Стационарная радиостанция «Гранит Р-24»
«Радиома-300»
Адаптированная к требованиям Речного флота мобильная радиостанция Tait-2000 производства новозеландской фирмы Tait. Как и «Гранит Р-24», имеет все частотные каналы.
Питание от сети постоянного тока напряжением 12 В. Для работы от бортсети с напряжением 24 В и ли 220 В поставляются соответствующие преобразователи. Комплектуется штыревой антенной.
В настоящее время появилось достаточно много компактных судовых радиостанций, способных разместиться на малых судах с ограниченным объемом внутренних помещений и энергоемкостью источников электропитания. К их числу относятся изготовленные в России специально по требованиям Речного Флота носимая радиостанция «Гранит-44» и стационарная (судовая) «Гранит Р-24», а также адаптированные радиостанции Tait 2000 («Радиома-300») и Saracom BS-80, носимые Tait T-5020 и Saracom TW-80. Все представленные радиостанции имеют допуск Российского Речного Регистра.
Ниже приведены краткие описания всех перечисленных радиостанций.
«Гранит Р-44»
Первая компактная носимая ДЦВ радиостанция речного флота (рис. 63), выполненная на современном уровне. Имеет все речные каналы (16 симплексных и 12 дуплексных) в диапазонах 300,0125– 300,5125 МГц и 336,0125– 336,5125 МГц. Очень удобна в эксплуатации – управление ее работой осуществляется с помощью нескольких кнопок, а для контроля каналов и состояния станции имеется небольшой жидкокристаллический дисплей. Может использоваться для работы в дуплексных каналах при использовании двухчастотного симплексного режима. В комплект поставки входят штатная антенна, аккумуляторная батарея, зарядное устройство и кожаный чехол. Для использования радиостанции в стационарном режиме дополнительно поставляются адаптер для питания от источников постоянного тока 12,6 В или 24 В, манипулятор (громкоговоритель/микрофон с переключателем прием/передача), выносная антенна с кабелем. Радиостанция имеет Допуск Речного Регистра РФ.
Рис. 63. Носимая радиостанция «Гранит Р-44»
MotorlaGP340
Носимая радиостанция производства известной американской фирмы Motorola (рис. 64). В отличие от радиостанции «Гранит Р-44», имеет только 16 каналов (номера каналов могут устанавливаться по желанию покупателя). Из-за отсутствия дисплея выбор каналов осуществляется по таблице соответствия, находящейся на передней части радиостанции, что достаточно неудобно, особенно в темноте.
SaracomTW-80
Адаптированная к требованиям Российского Речного Регистра носимая радиостанция производства корейской компании Saracom (рис. 65). В своем прошлом это была радиостанция для аварийно-спасательных средств, поэтому, по сравнению с другими радиостанциями обладает повышенной водостойкостью – выдерживает краткосрочное погружение в воду. Как и «Гранит Р-44» имеет набор опций, позволяющих использовать ее как стационарную.
Рис. 64. Носимая радиостанция Motorola GP-340
Рис. 65. Носимая радиостанция TW-80
TaitT-5020
Носимая УКВ радиостанция производства новозеландской компании Tait. Имеет все частотные каналы, жидкокристаллический дисплей (рис. 66).
«Гранит Р-24»
Стационарная ДЦВ радиостанция, специально разработанная для судов речного флота (рис. 67). Состоит из нескольких блоков – приемопередатчика, преобразователя напряжения 220/24/12 В (для судов с бортовой сетью 12 В блок не нужен), антенны. Работает на всех частотных каналах. Единственная радиостанция, предоставляющая возможность использовать ее из двух разнесенных постов управления. Штатная антенна радиостанции заземлена по постоянному току, что обеспечивает защиту радиостанции от грозовых разрядов и статического электричества.
Рис. 66. Носимая радиостанция Т-5020
Рис. 67. Стационарная радиостанция «Гранит Р-24»
«Радиома-300»
Адаптированная к требованиям Речного флота мобильная радиостанция Tait-2000 производства новозеландской фирмы Tait. Как и «Гранит Р-24», имеет все частотные каналы.
Питание от сети постоянного тока напряжением 12 В. Для работы от бортсети с напряжением 24 В и ли 220 В поставляются соответствующие преобразователи. Комплектуется штыревой антенной.
ПРИЛОЖЕНИЕ
Береговые радиостанции, ведущие наблюдение за сигналами бедствия
Расписание береговых радиостанций, передающих прогнозы погоды, предупреждения и путевую информацию
Связь на море
Связь на море намного многогранней, чем на внутренних водных путях. Для обеспечения безопасности и возможности приема и передачи информации в просторах Мирового Океана используется ряд систем – УКВ и ПВ радиостанции, спутниковая связь, средства приема метеорологической информации, спутниковая система подачи сигналов бедствия и определения координат, терпящих бедствие.
Все эти средства устанавливаются на суда в соответствии с районами их плавания.
Для небольшого катера, выходящего в море на рыбалку в пределах видимости берега нет необходимости пользоваться всеми этими средствами – достаточно иметь одну стационарную или носимую УКВ радиостанцию для связи с пограничниками, диспетчерами портов и, при необходимости, подачи сигналов бедствия.
Морские УКВ радиостанции используют для связи диапазон 156–162 МГц, нарезанный на 55 частотных каналов с интервалом 25 кГц. Связь может осуществляться как в симплексном, так и в дуплексном режимах в зависимости на выделенных для каждого вида работы каналах. Дуплексный режим работы используется, в основном, для связи с береговыми радиостанциями с возможностью выхода в городскую телефонную сеть.

Рис. 68. Морская стационарная УКВ радиостанция
Как на внутренних водных путях, морские УКВ радиостанции бывают двух видов – судовые (стационарные) и носимые. Стационарные имеют два режима мощности – 25 Вт и 1 Вт и предназначены для подачи и приема сигналов бедствия, взаимодействия с другими судами и береговыми службами (рис. 68).

Рис. 69. Морская носимая радиостанция
В современных радиостанциях существует система автоматического вызова и подачи (приема) сигналов бедствия – Цифровой Избирательный Вызов (ЦИВ).
Для связи с использованием ЦИВ в радиостанциях имеется 70-й канал, который всегда находиться в режиме дежурного приема.
Для вызовов в телефонном режиме используется 16-й канал, который до введения ЦИВ так же был каналом вызова и бедствия. В настоящее время большинство вызовов, не связанных с безопасностью, осуществляется на 16-м канале.
Носимые радиостанции (рис. 69) работают только в телефонном режиме и могут иметь любое количество каналов при обязательном наличии 16-го. Однако, как правило, он и имеют те же 55 каналов, как и судовые радиостанции. Мощность излучения носимых радиостанций – 1 и 5 Вт.
Для оснащенных радиостанциями малых судов основным каналом является 16-й – на нем осуществляются опрос пограничниками, диспетчерами портов. Радиостанции на этом канале необходимо держать постоянно включенной, т.к. на нем передаются срочные сообщения, штормовые предупреждения и прочая, требующая срочной передачи экстренная информация. На этом канале нельзя вести долгие переговоры – для этого требуется передать на 16-м канале предложение перейти на свободный канал и там вести разговоры.
На больших катерах со стационарными двигателями, не имеющих ограничений по электропитанию, целесообразно иметь стационарную радиостанцию, способную обеспечивать надежную связь на достаточно больших расстояниях. Для малых открытых катеров и мотолодок, имеющих ограничения по источникам питания, можно пользоваться носимой радиостанцией. Практика показывает, что с помощью носимой радиостанции можно иметь связь с береговыми станциями в пределах пограничной зоны.
Все эти средства устанавливаются на суда в соответствии с районами их плавания.
Для небольшого катера, выходящего в море на рыбалку в пределах видимости берега нет необходимости пользоваться всеми этими средствами – достаточно иметь одну стационарную или носимую УКВ радиостанцию для связи с пограничниками, диспетчерами портов и, при необходимости, подачи сигналов бедствия.
Морские УКВ радиостанции используют для связи диапазон 156–162 МГц, нарезанный на 55 частотных каналов с интервалом 25 кГц. Связь может осуществляться как в симплексном, так и в дуплексном режимах в зависимости на выделенных для каждого вида работы каналах. Дуплексный режим работы используется, в основном, для связи с береговыми радиостанциями с возможностью выхода в городскую телефонную сеть.
Рис. 68. Морская стационарная УКВ радиостанция
Как на внутренних водных путях, морские УКВ радиостанции бывают двух видов – судовые (стационарные) и носимые. Стационарные имеют два режима мощности – 25 Вт и 1 Вт и предназначены для подачи и приема сигналов бедствия, взаимодействия с другими судами и береговыми службами (рис. 68).
Рис. 69. Морская носимая радиостанция
В современных радиостанциях существует система автоматического вызова и подачи (приема) сигналов бедствия – Цифровой Избирательный Вызов (ЦИВ).
Для связи с использованием ЦИВ в радиостанциях имеется 70-й канал, который всегда находиться в режиме дежурного приема.
Для вызовов в телефонном режиме используется 16-й канал, который до введения ЦИВ так же был каналом вызова и бедствия. В настоящее время большинство вызовов, не связанных с безопасностью, осуществляется на 16-м канале.
Носимые радиостанции (рис. 69) работают только в телефонном режиме и могут иметь любое количество каналов при обязательном наличии 16-го. Однако, как правило, он и имеют те же 55 каналов, как и судовые радиостанции. Мощность излучения носимых радиостанций – 1 и 5 Вт.
Для оснащенных радиостанциями малых судов основным каналом является 16-й – на нем осуществляются опрос пограничниками, диспетчерами портов. Радиостанции на этом канале необходимо держать постоянно включенной, т.к. на нем передаются срочные сообщения, штормовые предупреждения и прочая, требующая срочной передачи экстренная информация. На этом канале нельзя вести долгие переговоры – для этого требуется передать на 16-м канале предложение перейти на свободный канал и там вести разговоры.
На больших катерах со стационарными двигателями, не имеющих ограничений по электропитанию, целесообразно иметь стационарную радиостанцию, способную обеспечивать надежную связь на достаточно больших расстояниях. Для малых открытых катеров и мотолодок, имеющих ограничения по источникам питания, можно пользоваться носимой радиостанцией. Практика показывает, что с помощью носимой радиостанции можно иметь связь с береговыми станциями в пределах пограничной зоны.
СУДОВЫЕ РАДИОЛОКАТОРЫ ДЛЯ МАЛОМЕРНОГО ФЛОТА
При плавании в условиях ограниченной видимости – ночью, в тумане, в дожде – существует реальная опасность столкновения с судном или каким-либо надводным препятствием. Для обеспечения безопасности плавания в таких условиях на судах используются специальные приборы – радиолокаторы или, по-английски, радары (аббревиатура фразы «Radio Detecting and Ranging – радиообнаружение и измерение дальности»).
Радиолокаторы впервые появились на судах и военных кораблях и в годы Второй Мировой войны и первоначально использовались для обнаружения воздушных и надводных целей. Обладая высокими по тем временам возможностями, они, тем не менее, оказались не востребованными гражданским флотом – громоздкие и недостаточно надежные, они занимали слишком много места на транспортных и пассажирских судах и, главное, требовали для их эксплуатации достаточно большого количества специально обученного персонала.
Окончательно судовой радиолокатор прописался в ходовой рубке гражданских судов после освоения диапазона волн длиной 3 см, применение которых позволило резко сократить размеры антенн и приемо-передающих устройств, и появления новых, надежных электронных компонентов, существенно повысивших надежность радара и предельно упростивших его эксплуатацию. Однако возможность их установки на относительно небольшие суда появилась лишь после широкого внедрения микроэлектроники, в первую очередь, твердотельных сверхвысокочастотных приборов, микропроцессоров и больших жидкокристаллических матриц (экранов), позволившим, в сочетании с современными методами обработки сигналов, получить компактные, надежные, экономичные и удобные в эксплуатации приборы.
Радиолокаторы впервые появились на судах и военных кораблях и в годы Второй Мировой войны и первоначально использовались для обнаружения воздушных и надводных целей. Обладая высокими по тем временам возможностями, они, тем не менее, оказались не востребованными гражданским флотом – громоздкие и недостаточно надежные, они занимали слишком много места на транспортных и пассажирских судах и, главное, требовали для их эксплуатации достаточно большого количества специально обученного персонала.
Окончательно судовой радиолокатор прописался в ходовой рубке гражданских судов после освоения диапазона волн длиной 3 см, применение которых позволило резко сократить размеры антенн и приемо-передающих устройств, и появления новых, надежных электронных компонентов, существенно повысивших надежность радара и предельно упростивших его эксплуатацию. Однако возможность их установки на относительно небольшие суда появилась лишь после широкого внедрения микроэлектроники, в первую очередь, твердотельных сверхвысокочастотных приборов, микропроцессоров и больших жидкокристаллических матриц (экранов), позволившим, в сочетании с современными методами обработки сигналов, получить компактные, надежные, экономичные и удобные в эксплуатации приборы.
Принцип работы радиолокатора
Прежде, чем переходить к конкретным приборам, кратко познакомимся с основными элементами и принципами работы радиолокатора.
Любой радиолокатор имеет три основных элемента – антенну, приемопередатчик и дисплей (рис. 70). В современных судовых радарах два первых элемента, как правило, объединяются в отдельный модуль, обычно называемый сканером (от слова «сканировать» – просматривать, искать).
При работе вращающаяся в горизонтальной плоскости антенна радара (рис. 71) излучает вырабатываемые передатчиком короткие высокочастотные импульсы (т.н. «зондирующие импульсы») и принимает отраженные от различных объектов сигналы. Приемник выделяет отраженные сигналы из шумов и передает их на дисплей, в котором осуществляется их усиление, выделение из различных помех (шумов) и отображение окружающего пространства на экране индикатора кругового обзора. Наблюдая на экране радиолокационную обстановку вокруг судна, оператор производит визуальное обнаружение целей (под целью в радиолокации понимается любой обнаруженный радаром объект), измерение их дальности и азимута относительно судна и управление работой радара.

Рис. 70. Состав судового радиолокатора
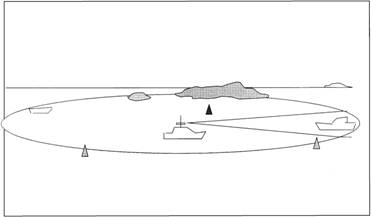
Рис. 71. Принцип действия судового радиолокатора
Любой радиолокатор имеет три основных элемента – антенну, приемопередатчик и дисплей (рис. 70). В современных судовых радарах два первых элемента, как правило, объединяются в отдельный модуль, обычно называемый сканером (от слова «сканировать» – просматривать, искать).
При работе вращающаяся в горизонтальной плоскости антенна радара (рис. 71) излучает вырабатываемые передатчиком короткие высокочастотные импульсы (т.н. «зондирующие импульсы») и принимает отраженные от различных объектов сигналы. Приемник выделяет отраженные сигналы из шумов и передает их на дисплей, в котором осуществляется их усиление, выделение из различных помех (шумов) и отображение окружающего пространства на экране индикатора кругового обзора. Наблюдая на экране радиолокационную обстановку вокруг судна, оператор производит визуальное обнаружение целей (под целью в радиолокации понимается любой обнаруженный радаром объект), измерение их дальности и азимута относительно судна и управление работой радара.
Рис. 70. Состав судового радиолокатора
Рис. 71. Принцип действия судового радиолокатора
Основные характеристики радаров
Функциональные возможности радиолокатора определяются рядом характеристик, понимание которых позволяет сделать правильный выбор аппарата, в той или иной степени удовлетворяющего потребностям владельца судна. Познакомимся с некоторыми из них.
Дальность действия
Дальность действия радара, указываемая в его паспортных данных – это его важнейший, но далеко не однозначный показатель, и в реальных условиях дальность обнаружения различных целей не всегда будет совпадать с заявленной.
Дальность обнаружения зависит от многих факторов – отражательной способности цели (характеризуемой т.н. ЭПР – эффективной поверхностью рассеяния), ее контрастностью по отношению к фону, высотой антенны и цели, состоянием атмосферы и моря. Поэтому, данная характеристика задается дифференцированно по типам целей и условиям работы радара. В соответствии с требованиями Международной Морской Организации IMO, при нормальных условиях распространения радиоволн, высоте установки антенны РЛС 15 м над уровнем воды и при отсутствии помех от моря, РЛС должна обеспечивать четкую индикацию:
Береговой черты:
– при высоте берега до 60 м на расстоянии до 20 морских миль;
–при высоте берега до 6 м на расстоянии до 7 морских миль.
Надводных объектов:
– судов валовой вместимостью 5000 т на расстоянии 7 морских миль независимо от ракурса;
– небольшого судна длиной 10 м на расстоянии 3 морских мили;
– объектов, аналогичных навигационному бую, имеющих ЭПР приблизительно 10 кв.м, на расстоянии 2 морских мили.
Поскольку обнаружение целей возможно только при наличии прямой видимости, то, зная высоту установки антенны радара и ориентировочно высоту цели, можно определить предельную дальность обнаружения в километрах, пользуясь известным выражением:
где h1 и h2 – высота установки антенны и высота цели над уровнем моря в метрах.
Обычно в паспортных данных приводят максимальную (инструментальную) дальность, составляющую для большинства компактных яхтенных радаров 16–36 морских миль.
В реальных условиях радиолокационное наблюдение ведется, как правило, на меньших расстояниях, определяемых потребностями судовождения. В этих случаях использование развертки экрана с максимальной дальностью нецелесообразно, т.к., это приводит к существенной перегруженности экрана и к уменьшению размеров цели, что затрудняет ее обнаружение. Поэтому, в радарах существует несколько так называемых шкал дальности – значений, в пределах которых может работать радар. Ниже приведен набор шкал дальности одного портативного радиолокатора:
Дальность (миль)
0,125 0,25 0,5 0,75 1,5 3,0 6,0 12 16
Такое большое количество шкал позволяет получать общее представление об окружающем пространстве на больших расстояниях и получать детальное радиолокационное изображение на дальностях, наиболее важных для обеспечения безопасности плавания. Кроме того, в некоторых радарах имеется возможность выделения и просмотра в укрупненном масштабе отдельных участков окружающего пространства.
Ошибки определения координат цели
Для любого навигационного прибора, определяющего местоположение, важнейшим показателем является ошибка определения местоположения. Судовой радар определяет две координаты цели – дальность относительно антенны и направление (азимут) относительно линии направления (истинного, магнитного, направления движения). Ошибка определения расстояния портативных радаров обычно составляет (0,9–1)% от максимального значения используемой шкалы дальности, ошибка определения направления – ±1°.
Скорость вращения антенны
Этот параметр определяет скорость обновления информации на экране радара и особенно важен при управлении скоростными судами. Скорости вращения антенн портативных радаров достаточно высокие – в зависимости от модели от 24 до 36 об/мин, что позволяет использовать их на всех доступных скоростях передвижения по воде.
Функциональные возможности Функциональные возможности радаров определяют удобство работы с прибором и способность получения той или иной информации. Для понимания того, что может современный радар, вспомним его основные функции.
Обнаружение целей
Обнаружение любых объектов осуществляется визуально на экране локатора. Небольшие объекты – суда, буи, островки – отображаются в виде ярких точек на фоне различных помех – от собственных шумов приемника, отражений от волн и атмосферных осадков, маскирующих отметки от целей. Поэтому, обнаружение целей является процессом выделения их отметок из помех.
Для выделения отметок от целей на фоне помех в судовых радарах предусмотрены различные функции – регулировка усиления приемника, подавление отражений от волн и дождя, расширение отметки (введение т.н. «следа эхо») и ряд других ухищрений, определяющих возможности радара быстро и надежно обнаруживать цели.
Определение координат целей Как уже отмечалось выше, судовой радиолокатор определяет две координаты в своей местной системе – дальность относительно судна и азимут относительно диаметральной плоскости судна или направления на север.
Измерение дальности
Дальность до цели может осуществляться тремя способами – с помощью колец дальности, с помощью курсора и с помощью маркера переменного расстояния VRM.
Если посмотреть на экран радара, первое, что бросается в глаза – это находящиеся на нем концентрические кольца (рис. 72). Количество колец и расстояния между ними жестко связаны с используемыми шкалами дальности. Если, например, используется шкала дальности 16 миль, а на экране 8 колец, то понятно, что интервал между кольцами составляет 2 мили. Для измерения расстояния до цели достаточно подсчитать количество колец между ее отметкой и центром экрана, умножить это число на расстояние между кольцами и прибавить оцененное на глаз приблизительное расстояние отметки от внутренней кромки ближайшего по направлению к центру кольца. Понятно, что такой способ дает наглядную и быструю, но весьма грубую оценку, поэтому для получения точных значений используют два других способа.
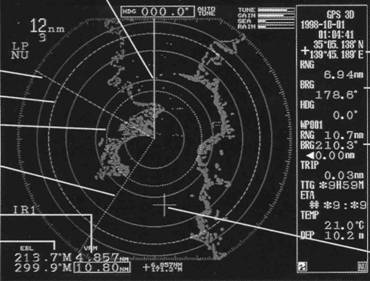
Рис. 72. Измерение дальности на экране радара
Для точных измерений может быть использован курсор и подвижный маркер расстояний VRM. Курсор – это отметка на экране в виде перекрестия, управляемая с помощью клавиш или трэкбола. Чтобы измерить дальность до цели, достаточно поместить перекрестие на внутреннюю кромку отметки, после чего искомое значение дальности вместе со значением азимута высветится в специальном окне в углу экрана.
Маркер расстояний – это кольцо на экране, радиус которого может выбираться оператором. Изменяя величину радиуса, Оператор совмещает кольцо с внутренней границей отметки цели – и вы получите значение расстояния до цели, высвеченное в углу экрана.
Измерение направления
Направление отсчитывается от курсовой линии – вертикальной линии на экране, совпадающей с диаметральной плоскостью судна. При наличии сопряженных с радаром магнитного компаса или гирокомпаса, отсчет азимута может осуществляться от магнитного или истинного направления на Север.
Измерение направления может осуществляться по положению цели на градусной сетке, с помощью курсора (аналогично показанному выше измерению дальности) либо с использованием линии электронного маркера пеленга EBL.
Первый способ дает большие ошибки измерения направления на цель и используется при судовождении для грубой оценки положения судна относительно цели.
Электронный маркер пеленга (EBL) – это исходящая из центра экрана линия (иногда называемая «линия электронного пеленга»), положение которой может управляться оператором. С помощью органов управления наводят маркер на середину отметки, после чего считывают высвеченные в углу экрана значения азимута, либо получают их по шкале направлений, находящейся на краю экрана.
Определение координат
При сопряжении радара с приемником спутниковой навигации или приемоиндикатором радионавигационных систем «Лоран» или «Дека», он может определять и высвечивать на экране широту и долготу выбранных целей.
Масштабирование
В современных радарах имеется возможность выделения отдельных участков и просмотра их в увеличенном масштабе на экране одновременно с наблюдением общего радиолокационного изображения. Для этого курсором выделяют диапазоны детального просмотра по дальности и азимуту и включают режим масштабирования.
Автоматическое сопровождение целей
При расхождении в условиях плохой видимости с одним судном с использованием радара задача решается довольно просто. Однако, в районах с интенсивным судоходством, когда на экране присутствует много отметок от движущихся и неподвижных целей, задача становится трудновыполнимой для судоводителя и светлое время суток.
Для облегчения распознавания целей на экране радиолокатора и маневрирования при большом количестве судов был создан т.н. «атоматический радар-плоттер» (АРП или ARPA), берущий на себя эту задачу. На современных радарах АРП – это небольшая плата, встраиваемая, при необходимости, в его дисплей.
Распознавание целей осуществляется путем анализа изменения их положения за определенное время, точнее, за определенное количество обзоров и привязки их к своим трассам движения. Выделенным целям автоматически присваиваются номера, которые выводят на экран вместе с целями, их траекториями и векторами скорости.
Многооконный режим
Помимо решения основных задач – обнаружения и определения координат целей – современные радиолокаторы обладают набором функций, существенно расширяющих их возможности.
Характерной особенностью современных радаров является многооконный режим работы дисплея. Помимо основного радиолокационного изображения в нижней части экрана располагаются т.н. «Data Boxes»-окна, в которых находится навигационная информация, получаемая от связанных с радаром датчиков – компаса, приемника GPS, эхолота, лага, а также данные о положении на экране курсора и маркеров направления и дальности.
С помощью дополнительных экранных окон можно выделить сектор контроля, положение курсора, а при сопряжении с приемником GPS – характерные для навигатора данные – истинную скорость и направление движения, путевые точки и расстояния до них, получить графическое изображение «Hayway», используемое в приемниках GPS для судовождения по путевым точкам и маршрутам.
Интерфейс
Интерфейс судовых радиолокаторов позволяет использовать их в составе навигационных систем, имеющих единый международный протокол обмена NMEA 0183 или «фирменный» протокол, например, упоминавшийся ранее Sea Talk, что позволяет сопрягать их с различными навигационными приборами и получать от них дополнительную информацию.
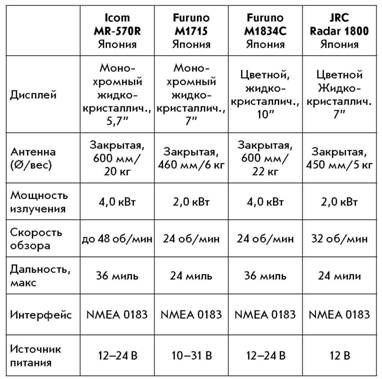
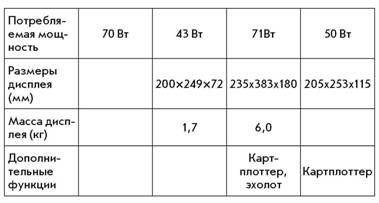
В прилагаемой ниже таблице приведены основные характеристики некоторых наиболее распространенных портативных радиолокаторов.
Дальность действия
Дальность действия радара, указываемая в его паспортных данных – это его важнейший, но далеко не однозначный показатель, и в реальных условиях дальность обнаружения различных целей не всегда будет совпадать с заявленной.
Дальность обнаружения зависит от многих факторов – отражательной способности цели (характеризуемой т.н. ЭПР – эффективной поверхностью рассеяния), ее контрастностью по отношению к фону, высотой антенны и цели, состоянием атмосферы и моря. Поэтому, данная характеристика задается дифференцированно по типам целей и условиям работы радара. В соответствии с требованиями Международной Морской Организации IMO, при нормальных условиях распространения радиоволн, высоте установки антенны РЛС 15 м над уровнем воды и при отсутствии помех от моря, РЛС должна обеспечивать четкую индикацию:
Береговой черты:
– при высоте берега до 60 м на расстоянии до 20 морских миль;
–при высоте берега до 6 м на расстоянии до 7 морских миль.
Надводных объектов:
– судов валовой вместимостью 5000 т на расстоянии 7 морских миль независимо от ракурса;
– небольшого судна длиной 10 м на расстоянии 3 морских мили;
– объектов, аналогичных навигационному бую, имеющих ЭПР приблизительно 10 кв.м, на расстоянии 2 морских мили.
Поскольку обнаружение целей возможно только при наличии прямой видимости, то, зная высоту установки антенны радара и ориентировочно высоту цели, можно определить предельную дальность обнаружения в километрах, пользуясь известным выражением:
где h1 и h2 – высота установки антенны и высота цели над уровнем моря в метрах.
Обычно в паспортных данных приводят максимальную (инструментальную) дальность, составляющую для большинства компактных яхтенных радаров 16–36 морских миль.
В реальных условиях радиолокационное наблюдение ведется, как правило, на меньших расстояниях, определяемых потребностями судовождения. В этих случаях использование развертки экрана с максимальной дальностью нецелесообразно, т.к., это приводит к существенной перегруженности экрана и к уменьшению размеров цели, что затрудняет ее обнаружение. Поэтому, в радарах существует несколько так называемых шкал дальности – значений, в пределах которых может работать радар. Ниже приведен набор шкал дальности одного портативного радиолокатора:
Дальность (миль)
0,125 0,25 0,5 0,75 1,5 3,0 6,0 12 16
Такое большое количество шкал позволяет получать общее представление об окружающем пространстве на больших расстояниях и получать детальное радиолокационное изображение на дальностях, наиболее важных для обеспечения безопасности плавания. Кроме того, в некоторых радарах имеется возможность выделения и просмотра в укрупненном масштабе отдельных участков окружающего пространства.
Ошибки определения координат цели
Для любого навигационного прибора, определяющего местоположение, важнейшим показателем является ошибка определения местоположения. Судовой радар определяет две координаты цели – дальность относительно антенны и направление (азимут) относительно линии направления (истинного, магнитного, направления движения). Ошибка определения расстояния портативных радаров обычно составляет (0,9–1)% от максимального значения используемой шкалы дальности, ошибка определения направления – ±1°.
Скорость вращения антенны
Этот параметр определяет скорость обновления информации на экране радара и особенно важен при управлении скоростными судами. Скорости вращения антенн портативных радаров достаточно высокие – в зависимости от модели от 24 до 36 об/мин, что позволяет использовать их на всех доступных скоростях передвижения по воде.
Функциональные возможности Функциональные возможности радаров определяют удобство работы с прибором и способность получения той или иной информации. Для понимания того, что может современный радар, вспомним его основные функции.
Обнаружение целей
Обнаружение любых объектов осуществляется визуально на экране локатора. Небольшие объекты – суда, буи, островки – отображаются в виде ярких точек на фоне различных помех – от собственных шумов приемника, отражений от волн и атмосферных осадков, маскирующих отметки от целей. Поэтому, обнаружение целей является процессом выделения их отметок из помех.
Для выделения отметок от целей на фоне помех в судовых радарах предусмотрены различные функции – регулировка усиления приемника, подавление отражений от волн и дождя, расширение отметки (введение т.н. «следа эхо») и ряд других ухищрений, определяющих возможности радара быстро и надежно обнаруживать цели.
Определение координат целей Как уже отмечалось выше, судовой радиолокатор определяет две координаты в своей местной системе – дальность относительно судна и азимут относительно диаметральной плоскости судна или направления на север.
Измерение дальности
Дальность до цели может осуществляться тремя способами – с помощью колец дальности, с помощью курсора и с помощью маркера переменного расстояния VRM.
Если посмотреть на экран радара, первое, что бросается в глаза – это находящиеся на нем концентрические кольца (рис. 72). Количество колец и расстояния между ними жестко связаны с используемыми шкалами дальности. Если, например, используется шкала дальности 16 миль, а на экране 8 колец, то понятно, что интервал между кольцами составляет 2 мили. Для измерения расстояния до цели достаточно подсчитать количество колец между ее отметкой и центром экрана, умножить это число на расстояние между кольцами и прибавить оцененное на глаз приблизительное расстояние отметки от внутренней кромки ближайшего по направлению к центру кольца. Понятно, что такой способ дает наглядную и быструю, но весьма грубую оценку, поэтому для получения точных значений используют два других способа.
Рис. 72. Измерение дальности на экране радара
Для точных измерений может быть использован курсор и подвижный маркер расстояний VRM. Курсор – это отметка на экране в виде перекрестия, управляемая с помощью клавиш или трэкбола. Чтобы измерить дальность до цели, достаточно поместить перекрестие на внутреннюю кромку отметки, после чего искомое значение дальности вместе со значением азимута высветится в специальном окне в углу экрана.
Маркер расстояний – это кольцо на экране, радиус которого может выбираться оператором. Изменяя величину радиуса, Оператор совмещает кольцо с внутренней границей отметки цели – и вы получите значение расстояния до цели, высвеченное в углу экрана.
Измерение направления
Направление отсчитывается от курсовой линии – вертикальной линии на экране, совпадающей с диаметральной плоскостью судна. При наличии сопряженных с радаром магнитного компаса или гирокомпаса, отсчет азимута может осуществляться от магнитного или истинного направления на Север.
Измерение направления может осуществляться по положению цели на градусной сетке, с помощью курсора (аналогично показанному выше измерению дальности) либо с использованием линии электронного маркера пеленга EBL.
Первый способ дает большие ошибки измерения направления на цель и используется при судовождении для грубой оценки положения судна относительно цели.
Электронный маркер пеленга (EBL) – это исходящая из центра экрана линия (иногда называемая «линия электронного пеленга»), положение которой может управляться оператором. С помощью органов управления наводят маркер на середину отметки, после чего считывают высвеченные в углу экрана значения азимута, либо получают их по шкале направлений, находящейся на краю экрана.
Определение координат
При сопряжении радара с приемником спутниковой навигации или приемоиндикатором радионавигационных систем «Лоран» или «Дека», он может определять и высвечивать на экране широту и долготу выбранных целей.
Масштабирование
В современных радарах имеется возможность выделения отдельных участков и просмотра их в увеличенном масштабе на экране одновременно с наблюдением общего радиолокационного изображения. Для этого курсором выделяют диапазоны детального просмотра по дальности и азимуту и включают режим масштабирования.
Автоматическое сопровождение целей
При расхождении в условиях плохой видимости с одним судном с использованием радара задача решается довольно просто. Однако, в районах с интенсивным судоходством, когда на экране присутствует много отметок от движущихся и неподвижных целей, задача становится трудновыполнимой для судоводителя и светлое время суток.
Для облегчения распознавания целей на экране радиолокатора и маневрирования при большом количестве судов был создан т.н. «атоматический радар-плоттер» (АРП или ARPA), берущий на себя эту задачу. На современных радарах АРП – это небольшая плата, встраиваемая, при необходимости, в его дисплей.
Распознавание целей осуществляется путем анализа изменения их положения за определенное время, точнее, за определенное количество обзоров и привязки их к своим трассам движения. Выделенным целям автоматически присваиваются номера, которые выводят на экран вместе с целями, их траекториями и векторами скорости.
Многооконный режим
Помимо решения основных задач – обнаружения и определения координат целей – современные радиолокаторы обладают набором функций, существенно расширяющих их возможности.
Характерной особенностью современных радаров является многооконный режим работы дисплея. Помимо основного радиолокационного изображения в нижней части экрана располагаются т.н. «Data Boxes»-окна, в которых находится навигационная информация, получаемая от связанных с радаром датчиков – компаса, приемника GPS, эхолота, лага, а также данные о положении на экране курсора и маркеров направления и дальности.
С помощью дополнительных экранных окон можно выделить сектор контроля, положение курсора, а при сопряжении с приемником GPS – характерные для навигатора данные – истинную скорость и направление движения, путевые точки и расстояния до них, получить графическое изображение «Hayway», используемое в приемниках GPS для судовождения по путевым точкам и маршрутам.
Интерфейс
Интерфейс судовых радиолокаторов позволяет использовать их в составе навигационных систем, имеющих единый международный протокол обмена NMEA 0183 или «фирменный» протокол, например, упоминавшийся ранее Sea Talk, что позволяет сопрягать их с различными навигационными приборами и получать от них дополнительную информацию.
В прилагаемой ниже таблице приведены основные характеристики некоторых наиболее распространенных портативных радиолокаторов.
Интегральные навигационные системы
Последним достижением судовой радиоэлектроники стало создание интегральных навигационных систем. Такие системы объединяют в себе функции нескольких различных приборов. Ранее уже упоминалось о эхолотах-приемниках GPS, об эхолотах-картплоттерах.
Последние разработки ряда производителей позволили объединить в одном приборе практически все судовые навигационные устройства – радар, картплоттер, эхолот, приемник навигационных и метеоданных и факс для приема метеокарт. Такие системы обычно включают основной блок – многофункциональный дисплей и набор опций. Такое построение позволяют создавать разные конфигурации систем в соответствии с потребностями (а также возможностями) владельца. Так, добавление к дисплею радиолокационного сканера превращает его в радар, добавление приемника GPS – в картплоттер, приемопередатчика и гидроакустического преобразователя – в рыбопоисковый или в навигационный эхолот (рис. 73).
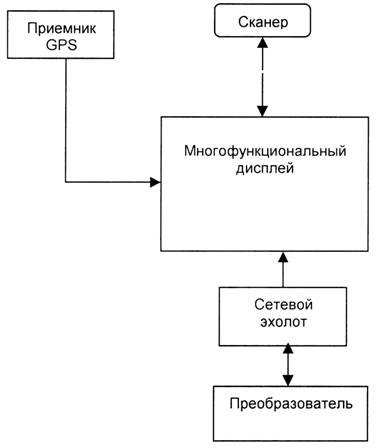
Рис. 73. Простейшая конфигурация интегральной системы
Все составляющие системы работают на один экран, при этом на нем может создаваться только одно изображение – радиолокационное, карта, подводное пространство, либо отображаться одновременно в многооконном режиме в различных комбинациях – радар, эхолот, картплоттер-эхолот, радар-картплоттер, причем, радиолокационное и карта могут отображаться раздельно или с наложением друг на друга.
Последние разработки ряда производителей позволили объединить в одном приборе практически все судовые навигационные устройства – радар, картплоттер, эхолот, приемник навигационных и метеоданных и факс для приема метеокарт. Такие системы обычно включают основной блок – многофункциональный дисплей и набор опций. Такое построение позволяют создавать разные конфигурации систем в соответствии с потребностями (а также возможностями) владельца. Так, добавление к дисплею радиолокационного сканера превращает его в радар, добавление приемника GPS – в картплоттер, приемопередатчика и гидроакустического преобразователя – в рыбопоисковый или в навигационный эхолот (рис. 73).
Рис. 73. Простейшая конфигурация интегральной системы
Все составляющие системы работают на один экран, при этом на нем может создаваться только одно изображение – радиолокационное, карта, подводное пространство, либо отображаться одновременно в многооконном режиме в различных комбинациях – радар, эхолот, картплоттер-эхолот, радар-картплоттер, причем, радиолокационное и карта могут отображаться раздельно или с наложением друг на друга.