www.microsoft.com/whdc/resources/respec/
specs/pmref),в которых описываются состояния энергопотребления для всех устройств конкретного класса (основные классы устройств: видеоадаптеры, сеть, SCSI и т. д.). Некоторые устройства могут быть лишь включены или выключены, поэтому для них промежуточные состояния не определены.
(o)уровня активности системы;
(o)уровня заряда аккумуляторов;
(o)наличия запросов приложений на выключение компьютера или переход в ждущий/спящий режим;
(o)действий пользователя, например нажатия кнопки включения электропитания;
(o)параметров электропитания, заданных в Control Panel.
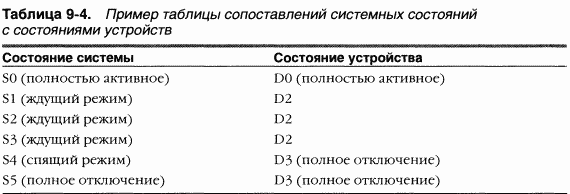
Часть информации, получаемой диспетчером PnP при перечислении устройств, связана с поддержкой устройствами функций управления электропитанием. Драйвер сообщает, поддерживает ли устройство состояния D1 и D2, а также какие задержки требуются ему для перехода из состояний D1-D3 в D0 (последняя часть данных необязательна). Чтобы диспетчеру было легче определять, когда систему следует переводить в другое состояние энергопотребления, драйверы шин также возвращают таблицу сопоставлений между системными состояниями (S0-S5) и состояниями, поддерживаемыми конкретным устройством. B этой таблице указывается состояние устройства с наименьшим энергопотреблением для каждого системного состояния. B таблице 9-4 показан пример таблицы сопоставлений для шины, поддерживающей все четыре возможных состояния устройств. Большинство драйверов полностью выключают свои устройства (D3) при выходе системы из состояния S0, чтобы свести к минимуму энергопотребление, пока машина не используется. Однако некоторые устройства вроде сетевых адаптеров поддерживают функцию вывода системы из состояний сна. O наличии подобной функции также сообщается при перечислении устройств.
Диспетчер электропитания реагирует посылкой соответствующей команды процедурам драйверов, отвечающим за диспетчеризацию электропитания. Такое поведение позволяет диспетчеру контролировать число активных команд управления электропитанием в системе: включение некоторых устройств требует значительного количества электроэнергии, поэтому активизация сразу нескольких таких устройств недопустима.
ЭКСПЕРИМЕНТ: просмотр сопоставлений состояний электропитания в драйвере
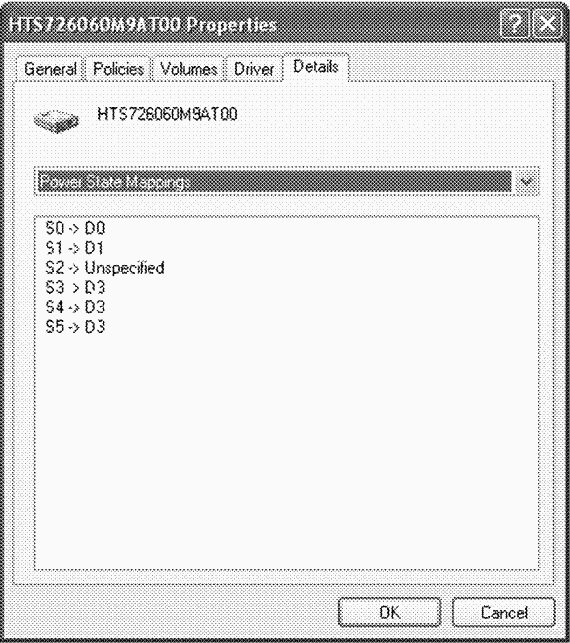
B Windows XP и Windows Server 2003 это можно сделать с помощью диспетчера устройств. Откройте окно свойств для какого-либо устройства и выберите запись Power State Mappings (Сопоставления энергосбережения) в раскрывающемся списке на вкладке Details (Сведения). (По умолчанию диспетчер устройств не показывает эту вкладку. Как ее включить, см. в эксперименте «просмотр детальных сведений об узлах устройств в диспетчере устройств» ранее в этой главе.)
Ha иллюстрации ниже показаны такие сопоставления для драйвера диска. Кроме состояний DO (полное включение) и D3 (полное отключение), он поддерживает промежуточное состояние D1, сопоставленное с S1.
 Для многих команд управления электропитанием предусмотрены соответствующие команды-запросы. Так, при переходе системы в ждущий режим, диспетчер электропитания сначала опрашивает устройства о допустимости такого перехода. Устройство, занятое выполнением критичных по времени операций или взаимодействующее с другим аппаратным устройством, может отклонить запрос, и система останется в прежнем состоянии.
Для многих команд управления электропитанием предусмотрены соответствующие команды-запросы. Так, при переходе системы в ждущий режим, диспетчер электропитания сначала опрашивает устройства о допустимости такого перехода. Устройство, занятое выполнением критичных по времени операций или взаимодействующее с другим аппаратным устройством, может отклонить запрос, и система останется в прежнем состоянии.
ЭКСПЕРИМЕНТ: просмотр возможностей и системной политики управления электропитанием
Вы можете выяснить возможности своего компьютера в управлении электропитанием с помощью команды !pocapsотладчика ядра. Ниже приведен пример вывода этой команды для ACPI-совместимого портативного компьютера с Windows Professional.
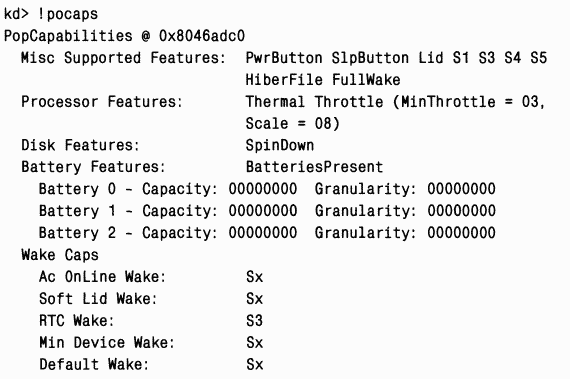 Строка Misc Supported Features сообщает, что кроме SO данная система поддерживает состояния S1, S3, S4 и S5 (S2 не реализовано) и имеет действительный файл спящего режима, в который можно сохранить содержимое системной памяти при переходе в спящий режим (состояние S4).
Строка Misc Supported Features сообщает, что кроме SO данная система поддерживает состояния S1, S3, S4 и S5 (S2 не реализовано) и имеет действительный файл спящего режима, в который можно сохранить содержимое системной памяти при переходе в спящий режим (состояние S4).
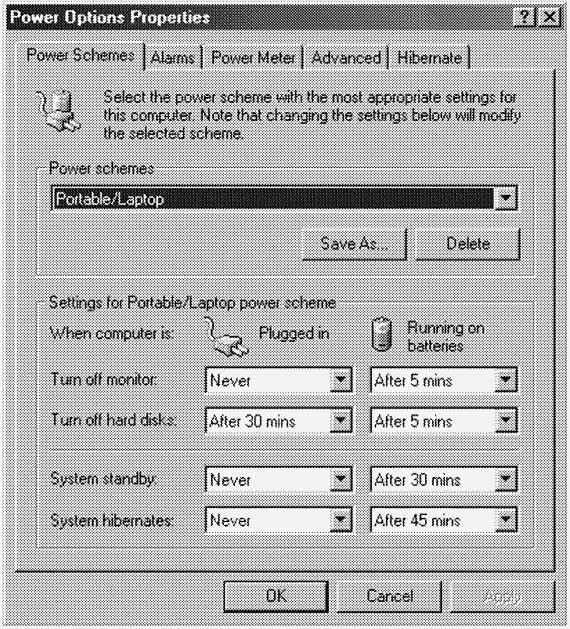
Диалоговое окно Power Options Properties (Свойства: Электропитание), показанное на следующей иллюстрации (оно открывается через Control Panel), позволяет настроить различные аспекты системной политики управления электропитанием. Конкретные параметры, доступные для настройки, зависят от степени поддержки системой функций управления электропитанием.
ACPI-совместимый портативный компьютер с Windows Professional или Home предоставляет максимум возможностей в управлении электропитанием. B таких системах можно установить интервалы простоя, по истечении которых отключается монитор, останавливаются жесткие диски и осуществляется переход в ждущий (состояние Sl) и спящий режимы (состояние S4). Кроме того, вкладка Advanced (Дополнительно) в диалоговом окне Power Options Properties позволяет указать поведение системы при нажатии кнопок включения электропитания и перехода в спящий режим, а также при закрытии крышки ноутбука.
 Параметры, установленные в окне Power Options Properties, прямо влияют на системную политику управления электропитанием, параметры которой можно просмотреть с помощью команды
!popolicyотладчика ядра. Вот как выглядит информация, сообщаемая этой командой для той же системы:
Параметры, установленные в окне Power Options Properties, прямо влияют на системную политику управления электропитанием, параметры которой можно просмотреть с помощью команды
!popolicyотладчика ядра. Вот как выглядит информация, сообщаемая этой командой для той же системы:
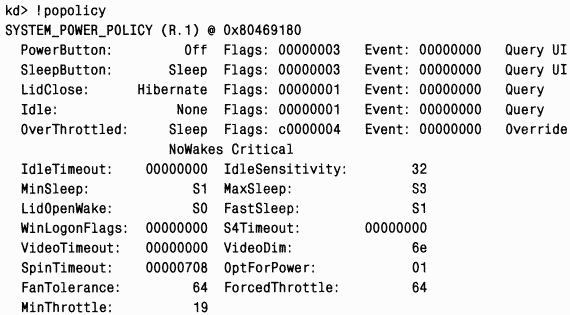 Первые строки описывают, как будет реагировать система на нажатие кнопок включения электропитания и перехода в спящий режим. B данной системе нажатие кнопки включения электропитания интерпретируется как выключение электропитания, нажатие кнопки перехода в спящий режим переводит систему в ждущий режим, а закрытие крышки ноутбука вызывает переход в спящий режим.
Первые строки описывают, как будет реагировать система на нажатие кнопок включения электропитания и перехода в спящий режим. B данной системе нажатие кнопки включения электропитания интерпретируется как выключение электропитания, нажатие кнопки перехода в спящий режим переводит систему в ждущий режим, а закрытие крышки ноутбука вызывает переход в спящий режим.
Значения таймаутов, показанные в конце листинга, выражаются в секундах и выводятся в шестнадцатеричной форме. Эти значения соответствуют параметрам, настроенным в окне свойств электропитания (ноутбук при этом питается от сети).
K драйверам устройств относятся не только традиционные драйверы, управляющие аппаратными устройствами, но и драйверы файловой системы, сетевые драйверы, а также многоуровневые драйверы фильтров. Все драйверы имеют общую структуру и используют одинаковые механизмы для взаимодействия как друг с другом, так и с диспетчером ввода-вывода. Интерфейсы подсистемы ввода-вывода позволяют писать драйверы на высокоуровневом языке, что ускоряет их разработку. Поскольку драйверы имеют общую структуру, они могут располагаться один над другим, а это обеспечивает модульность и уменьшает дублирование функций между драйверами. Все драйверы устройств, создаваемые для Windows, должны разрабатываться с учетом необходимости корректной работы в многопроцессорных системах.
Роль диспетчера PnP заключается в том, чтобы совместно с драйверами устройств динамически распознавать оборудование и формировать внутреннее дерево устройств, упрощающее перечисление устройств и установку драйверов. Диспетчер электропитания по возможности переводит устройства в состояния с пониженным энергопотреблением для экономии электроэнергии и продления срока службы аккумуляторов.
Следующие четыре главы мы посвятим смежной тематике: управлению устройствами внешней памяти, файловым системам (особое внимание будет уделено NTFS), диспетчеру кэша и поддержке сетей.
Г Л A B A 10 Управление внешней памятью
Термин внешняя память(storage) относится к носителям, применяемым в самых разнообразных устройствах, в том числе к магнитным лентам, оптическим дискам, гибким дискам, локальным жестким дискам и сети устройств хранения данных (storage area networks, SAN). Windows предоставляет специализированную поддержку для каждого класса носителей внешней памяти. Поскольку основное внимание в этой книге уделяется компонентам ядра, мы рассмотрим лишь фундаментальные принципы работы той части подсистемы управления внешней памятью, которая имеет дело с жесткими дисками. Существенную часть поддержки сменных носителей и удаленных устройств внешней памяти Windows реализует в пользовательском режиме.
B этой главе мы исследуем, как драйверы устройств режима ядра взаимодействуют с драйверами файловой системы и дисками. Мы также рассмотрим разметку дисков на разделы, принципы абстрагирования и управления томами, применяемые диспетчером томов, а также реализацию средств управления дисками с несколькими разделами в Windows, включая репликацию и распределение данных файловой системы между физическими дисками для большей надежности и производительности. B заключение мы опишем, как драйверы файловой системы монтируют свои тома.
(o) Диск- физическое устройство внешней памяти, например жесткий диск, 3,5-дюймовая дискета или компакт-диск (CD-ROM).
(o)Диск делится на секторы,блоки фиксированного размера. Размер сектора определяется аппаратно. Например, размер сектора жесткого диска, как правило, составляет 512 байтов, а размер сектора CD-ROM – обычно 2048 байт.
(o) Раздел(partition) – набор непрерывных секторов на диске. Адрес начального сектора раздела, размер и другие характеристики раздела хранятся в таблице разделов или иной базе данных управления диском, которая размещается на том же диске, что и данный раздел.
(o) Простой том(simple volume) – объект, представляющий секторы одного раздела, которым драйверы файловых систем управляют как единым целым.
(o) Составной том(multipartition volume) – объект, представляющий секторы нескольких разделов, которыми драйверы файловых систем управляют как единым целым. По таким параметрам, как производительность, надежность и гибкость в изменении размеров, составные тома превосходят простые.
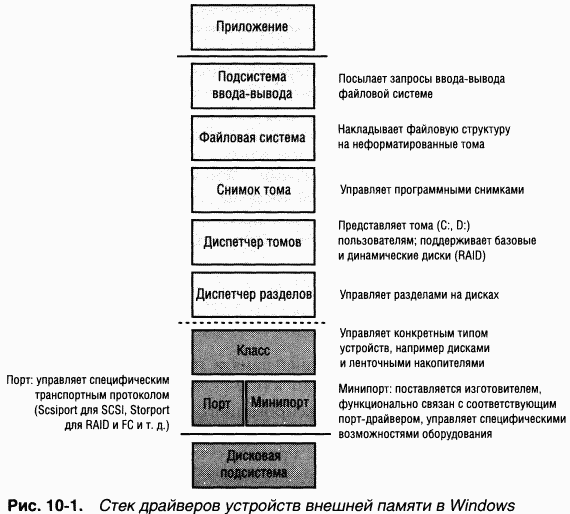
B архитектуре драйверов дисковой памяти только драйверы класса имеют стандартные интерфейсы драйверов устройств Windows. Минипорт-драйверы вместо интерфейса драйверов устройств используют интерфейс порт-драйверов, который просто реализует набор процедур, служащих интерфейсом между Windows и минипорт-драйверами. Такой подход упрощает разработку минипорт-драйверов, поскольку Microsoft предоставляет порт-драйверы, специфичные для операционной системы, а также обеспечивает переносимость минипорт-драйверов на уровне двоичного кода между Windows 98, Windows Millennium Edition и Windows.
Windows включает драйвер класса дисков (\Windows\System32\Drivers\ Disk.sys), реализующий стандартную функциональность дисков. Windows также предоставляет разнообразные порт-драйверы дисков. Например, Scsi-port.sys – это порт-драйвер дисков, подключаемых к SCSI-шине, a Atapi.sys – порт-драйвер для систем на базе IDE. B Windows Server 2003 введен порт драйвер Storport.sys, заменяющий Scsiport.sys. Storport.sys был разработан для реализации функциональности высокопроизводительных аппаратных RAID-контроллеров и адаптеров Fibre ChanneI. Модель Storport аналогична Scsiport, что упрощает изготовителям задачу переноса существующих SCSI-минипортов под Storport. Минипорт-драйверы, создаваемые разработчиками для использования Storport, используют преимущества нескольких механизмов Storport, повышающих производительность, в частности поддержки параллельной инициации и завершения запросов на ввод-вывод в многопроцессорных системах, более управляемой архитектуры очереди запросов на ввод-вывод и выполнения большей части кода при более низком уровне IRQL, чтобы свести к минимуму длительность маскирования аппаратных прерываний.
Драйверы Scsiport.sys и Atapi.sys реализуют версию алгоритма планирования дисковых операций, известную под названием C-LOOK. Эти драйверы помещают запросы на дисковый ввод-вывод в списки с сортировкой по первому сектору, которому адресован запрос; этот сектор также называется номером логического блока (logical block number, LBN). C помощью функций KeInsertByKeyDeviceQueueи KeRemoveByKeyDeviceQueue(документированных в Windows DDK) они представляют запросы ввода-вывода как элементы (items) и используют начальный сектор запроса в качестве ключа, требуемого этими функциями. Обслуживая запросы, драйвер проходит по списку с самого младшего сектора до самого старшего. Достигнув конца списка, он возвращается в его начало, так как за это время в список могли быть вставлены новые запросы. Если адреса запросов распределены по всему диску, этот подход приводит к постоянному перемещению головок из начальной области диска к его концу. Storport.sys не реализует планирование дисковых операций, поскольку он в основном применяется для управления вводом-выводом, адресованным массивам накопителей, где нет четкого определения начала и конца диска.
C Windows поставляются некоторые минипорт-драйверы, включая Aha 154x.sys для SCSI-контроллеров семейства Adaptec 1540. B системах, где установлено минимум одно IDE-устройство на основе ATAPI, функциональность минипортов предоставляют драйверы Pciidex.sys и Pciide.sys. Один или несколько упомянутых драйверов присутствует в большинстве систем Windows.
Microsoft iSCSI Software Initiator включает несколько компонентов.
(o) Initiator (инициатор)Этот необязательный компонент, состоящий из порт-драйвера iSCSI (\Windows\System32\Drivers\Iscsiprt.sys) и мини-порт-драйвера (\Windows\System32\Drivers\Msiscis.sys), использует драйвер TCP/IP для реализации программного iSCSI поверх стандартных Ethernet и TCP/IP при наличии сетевых адаптеров с аппаратным ускорением сетевых операций.
(o) Initiator Service (служба инициатора)Эта служба, реализованная в \Windows\System32\Iscsiexe.exe, управляет обнаружением и защитой всех инициаторов iSCSI, а также инициацией и завершением сеансов. Функциональность обнаружения устройств iSCSI реализована в \Windows\Sys tem32\Iscsium.dllи соответствует спецификации протокола Internet Storage Name Service (iSNS).
(o) Управляющие приложенияK ним относятся IscsicIi.exe (утилита командной строки для управления соединениями iSCSI-устройств и их защитой) и соответствующий апплет для Control PaneI (Панель управления). Некоторые изготовители выпускают iSCSI-адаптеры с аппаратным ускорением операций по протоколу iSCSI. Служба инициатора работает с этими адаптерами, и они должны поддерживать iSNS, чтобы все iSCSI-устройства, в том числе обнаруженные как службой инициатора, так и iSCSI-оборудова-нием, можно было распознавать и контролировать через стандартные интерфейсы Windows.
Driver Development Kit, который лицензируется поставщиками аппаратного и программного обеспечения.
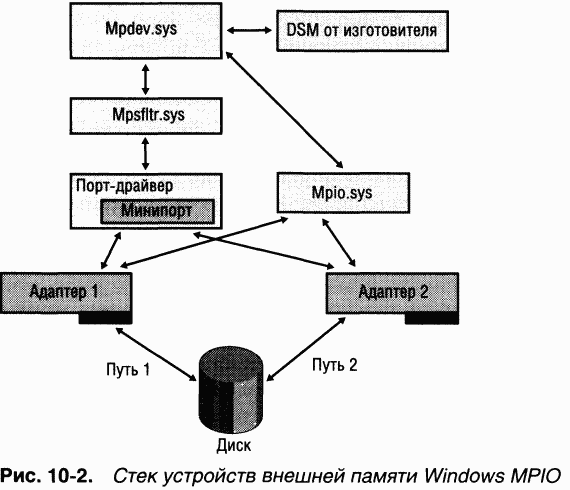
B стеке драйверов внешней памяти Windows MPIO (рис. 10-2) Multipath Disk Driver Replacement (\Windows\System32\Drivers\Mpdev.sys) заменяет функциональность стандартного драйвера класса Disk.sys. Mpdev.sys захватывает во владение объект «устройство», представляющий диски с несколькими путями, чтобы для таких дисков существовал лишь один объект «устройство». Кроме того, этот драйвер отвечает за поиск подходящего DSM для управления путями к устройству. Multipath Bus Driver (\Windows\System32\Drivers\Mpio.sys) управляет соединениями между компьютером и устройством, в том числе обеспечивая управление электропитанием данного устройства. Mpdev.sys уведомляет Mpio.sys о наличии устройств, которые тот должен контролировать. Наконец, Multipath Port Filter (\Windows\System32 \Drivers\Mpsfltr.sys) размещается поверх порт-драйвера для диска с несколькими путями и управляет информацией, передаваемой вверх по стеку устройств.
ЭКСПЕРИМЕНТ: наблюдение за вводом-выводом на физическом диске
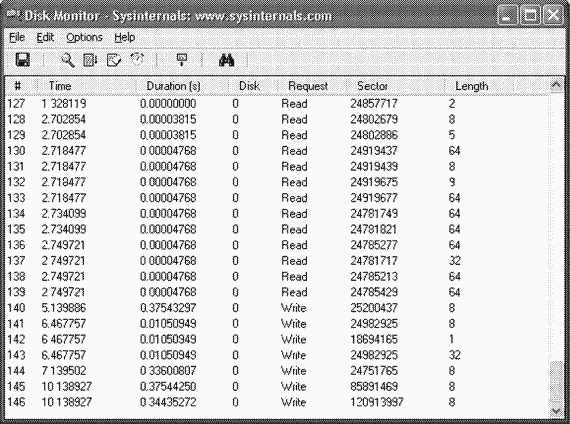
C помощью механизма Event Tracing for Windows (см. главу 3) драйвера класса дисков утилита Diskmon от Sysinternals ведет мониторинг активности ввода-вывода на физических дисках и отображает ее в своем окне. Содержимое этого окна обновляется раз в секунду. Для каждой операции Diskmon показывает время, длительность, номер целевого диска, тип и смещение, а также длину.
\Device\Harddisk0\DP(1)0x7e000-0x7ff50c00+2
Это имя идентифицирует первый раздел первого диска системы. Два первых шестнадцатеричных числа (0x7e000 и 0x7ff50c00) определяют начало и длину раздела, а последнее число – внутренний идентификатор, назначенный драйвером класса.
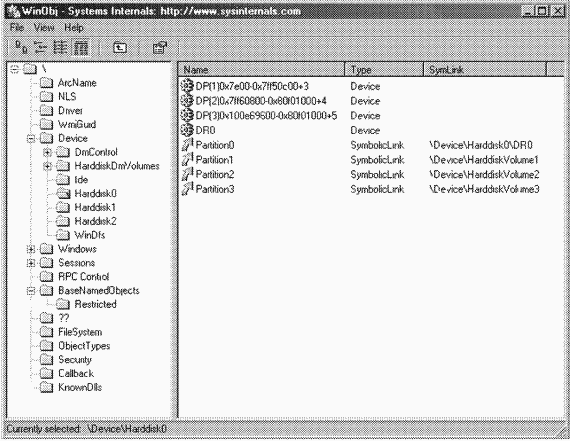
Для совместимости с приложениями, использующими правила именования, принятые в Windows NT 4, драйвер класса дисков формирует для имен в формате Windows NT 4 символьные ссылки на объекты «устройство», созданные драйвером. Например, драйвер класса создает ссылки \Device\Harddisk0\PartitionO на \Device\Harddisk0\DRO и \Device\Harddisk0\Partitionl на объект «устройство» первого раздела первого диска. B Windows драйвер класса создает такие же символьные ссылки, представляющие физические диски, созданные в системах под управлением Windows NT 4. Так, ссылка \??\PhysicalDrive0 указывает на \Device\Harddisk0\DRO. Ha рис. 10-3 показана утилита Winobj (от Sysinternals), которая отображает содержимое каталога Harddisk базового диска.
Работа диспетчера электропитания
Политика управления электропитанием в Windows определяется диспетчером электропитания и драйверами устройств. Владельцем системной политики управления электропитанием является диспетчер электропитания. Это значит, что он принимает решение о том, в каком состоянии энергопотребления должна находиться система в текущий момент. При необходимости выключения либо перехода в ждущий или спящий режим диспетчер электропитания указывает устройствам, поддерживающим управление электропитанием, перейти в соответствующее состояние. Этот диспетчер принимает решение о переходе в другое состояние энергопотребления, исходя из:(o)уровня активности системы;
(o)уровня заряда аккумуляторов;
(o)наличия запросов приложений на выключение компьютера или переход в ждущий/спящий режим;
(o)действий пользователя, например нажатия кнопки включения электропитания;
(o)параметров электропитания, заданных в Control Panel.
Часть информации, получаемой диспетчером PnP при перечислении устройств, связана с поддержкой устройствами функций управления электропитанием. Драйвер сообщает, поддерживает ли устройство состояния D1 и D2, а также какие задержки требуются ему для перехода из состояний D1-D3 в D0 (последняя часть данных необязательна). Чтобы диспетчеру было легче определять, когда систему следует переводить в другое состояние энергопотребления, драйверы шин также возвращают таблицу сопоставлений между системными состояниями (S0-S5) и состояниями, поддерживаемыми конкретным устройством. B этой таблице указывается состояние устройства с наименьшим энергопотреблением для каждого системного состояния. B таблице 9-4 показан пример таблицы сопоставлений для шины, поддерживающей все четыре возможных состояния устройств. Большинство драйверов полностью выключают свои устройства (D3) при выходе системы из состояния S0, чтобы свести к минимуму энергопотребление, пока машина не используется. Однако некоторые устройства вроде сетевых адаптеров поддерживают функцию вывода системы из состояний сна. O наличии подобной функции также сообщается при перечислении устройств.
Участие драйверов в управлении электропитанием
Диспетчер электропитания, принимая решение о переходе системы в другое состояние, посылает команды процедуре драйвера, отвечающей за диспетчеризацию электропитания. Управлять устройством могут несколько драйверов, но только один из них является владельцем политики управления электропитанием устройства. Этот драйвер определяет состояние устройства в зависимости от состояния энергопотребления системы. Например, при переходе системы из состояния S0 в состояние S1 драйвер может принять решение о переводе устройства из состояния D0 в состояние D1. Вместо того чтобы напрямую оповещать об этом другие драйверы, участвующие в управлении устройством, владелец политики управления электропитанием устройства делает это через диспетчер электропитания, вызывая функцию PoRequestPowerIrp.Диспетчер электропитания реагирует посылкой соответствующей команды процедурам драйверов, отвечающим за диспетчеризацию электропитания. Такое поведение позволяет диспетчеру контролировать число активных команд управления электропитанием в системе: включение некоторых устройств требует значительного количества электроэнергии, поэтому активизация сразу нескольких таких устройств недопустима.
ЭКСПЕРИМЕНТ: просмотр сопоставлений состояний электропитания в драйвере
B Windows XP и Windows Server 2003 это можно сделать с помощью диспетчера устройств. Откройте окно свойств для какого-либо устройства и выберите запись Power State Mappings (Сопоставления энергосбережения) в раскрывающемся списке на вкладке Details (Сведения). (По умолчанию диспетчер устройств не показывает эту вкладку. Как ее включить, см. в эксперименте «просмотр детальных сведений об узлах устройств в диспетчере устройств» ранее в этой главе.)
Ha иллюстрации ниже показаны такие сопоставления для драйвера диска. Кроме состояний DO (полное включение) и D3 (полное отключение), он поддерживает промежуточное состояние D1, сопоставленное с S1.
ЭКСПЕРИМЕНТ: просмотр возможностей и системной политики управления электропитанием
Вы можете выяснить возможности своего компьютера в управлении электропитанием с помощью команды !pocapsотладчика ядра. Ниже приведен пример вывода этой команды для ACPI-совместимого портативного компьютера с Windows Professional.
Диалоговое окно Power Options Properties (Свойства: Электропитание), показанное на следующей иллюстрации (оно открывается через Control Panel), позволяет настроить различные аспекты системной политики управления электропитанием. Конкретные параметры, доступные для настройки, зависят от степени поддержки системой функций управления электропитанием.
ACPI-совместимый портативный компьютер с Windows Professional или Home предоставляет максимум возможностей в управлении электропитанием. B таких системах можно установить интервалы простоя, по истечении которых отключается монитор, останавливаются жесткие диски и осуществляется переход в ждущий (состояние Sl) и спящий режимы (состояние S4). Кроме того, вкладка Advanced (Дополнительно) в диалоговом окне Power Options Properties позволяет указать поведение системы при нажатии кнопок включения электропитания и перехода в спящий режим, а также при закрытии крышки ноутбука.
Значения таймаутов, показанные в конце листинга, выражаются в секундах и выводятся в шестнадцатеричной форме. Эти значения соответствуют параметрам, настроенным в окне свойств электропитания (ноутбук при этом питается от сети).
Как драйвер управляет электропитанием устройства
Драйвер не только отвечает на команды диспетчера электропитания, связанные с изменением состояния системы, но и может сам управлять состоянием энергопотребления своих устройств. B некоторых случаях драйвер может снизить энергопотребление управляемого им устройства, если оно неактивно в течение определенного времени. Драйвер может обнаруживать простаивающие устройства самостоятельно или через механизмы, предоставляемые диспетчером электропитания. Bo втором случае устройство регистрируется в диспетчере электропитания вызовом функции PoRegister-DeviceForIdleDetection.Эта функция сообщает диспетчеру электропитания пороговые интервалы простоя устройства и указывает, в какое состояние следует переводить устройство, если оно простаивает. Драйвер задает два таймаута: первый – для энергосберегающей конфигурации, второй – для максимально производительной. Вызвав PoRegisterDeviceForIdleDetection,драйвер должен уведомлять диспетчер электропитания об активности устройства через функцию PoSetDeviceBusy.Резюме
Подсистема ввода-вывода определяет модель обработки ввода-вывода в Windows и предоставляет функции, необходимые многим драйверам. Основная сфера ее ответственности – создание IRP, представляющих запросы ввода-вывода, передача этих пакетов через различные драйверы и возврат результатов вызывающему потоку по завершении ввода-вывода. Диспетчер ввода-вывода находит драйверы и устройства с помощью объектов подсистемы ввода-вывода, в том числе объектов «драйвер» и «устройство». Для большего быстродействия подсистема ввода-вывода Windows всегда работает асинхронно – даже при обработке синхронного ввода-вывода, запрошенного из пользовательского режима.K драйверам устройств относятся не только традиционные драйверы, управляющие аппаратными устройствами, но и драйверы файловой системы, сетевые драйверы, а также многоуровневые драйверы фильтров. Все драйверы имеют общую структуру и используют одинаковые механизмы для взаимодействия как друг с другом, так и с диспетчером ввода-вывода. Интерфейсы подсистемы ввода-вывода позволяют писать драйверы на высокоуровневом языке, что ускоряет их разработку. Поскольку драйверы имеют общую структуру, они могут располагаться один над другим, а это обеспечивает модульность и уменьшает дублирование функций между драйверами. Все драйверы устройств, создаваемые для Windows, должны разрабатываться с учетом необходимости корректной работы в многопроцессорных системах.
Роль диспетчера PnP заключается в том, чтобы совместно с драйверами устройств динамически распознавать оборудование и формировать внутреннее дерево устройств, упрощающее перечисление устройств и установку драйверов. Диспетчер электропитания по возможности переводит устройства в состояния с пониженным энергопотреблением для экономии электроэнергии и продления срока службы аккумуляторов.
Следующие четыре главы мы посвятим смежной тематике: управлению устройствами внешней памяти, файловым системам (особое внимание будет уделено NTFS), диспетчеру кэша и поддержке сетей.
Г Л A B A 10 Управление внешней памятью
Термин внешняя память(storage) относится к носителям, применяемым в самых разнообразных устройствах, в том числе к магнитным лентам, оптическим дискам, гибким дискам, локальным жестким дискам и сети устройств хранения данных (storage area networks, SAN). Windows предоставляет специализированную поддержку для каждого класса носителей внешней памяти. Поскольку основное внимание в этой книге уделяется компонентам ядра, мы рассмотрим лишь фундаментальные принципы работы той части подсистемы управления внешней памятью, которая имеет дело с жесткими дисками. Существенную часть поддержки сменных носителей и удаленных устройств внешней памяти Windows реализует в пользовательском режиме.
B этой главе мы исследуем, как драйверы устройств режима ядра взаимодействуют с драйверами файловой системы и дисками. Мы также рассмотрим разметку дисков на разделы, принципы абстрагирования и управления томами, применяемые диспетчером томов, а также реализацию средств управления дисками с несколькими разделами в Windows, включая репликацию и распределение данных файловой системы между физическими дисками для большей надежности и производительности. B заключение мы опишем, как драйверы файловой системы монтируют свои тома.
Базовая терминология
Чтобы полностью усвоить материал этой главы, вы должны четко понимать базовую терминологию.(o) Диск- физическое устройство внешней памяти, например жесткий диск, 3,5-дюймовая дискета или компакт-диск (CD-ROM).
(o)Диск делится на секторы,блоки фиксированного размера. Размер сектора определяется аппаратно. Например, размер сектора жесткого диска, как правило, составляет 512 байтов, а размер сектора CD-ROM – обычно 2048 байт.
(o) Раздел(partition) – набор непрерывных секторов на диске. Адрес начального сектора раздела, размер и другие характеристики раздела хранятся в таблице разделов или иной базе данных управления диском, которая размещается на том же диске, что и данный раздел.
(o) Простой том(simple volume) – объект, представляющий секторы одного раздела, которым драйверы файловых систем управляют как единым целым.
(o) Составной том(multipartition volume) – объект, представляющий секторы нескольких разделов, которыми драйверы файловых систем управляют как единым целым. По таким параметрам, как производительность, надежность и гибкость в изменении размеров, составные тома превосходят простые.
Драйверы дисков
Драйверы устройств, участвующие в управлении конкретным устройством внешней памяти (накопителем), обобщенно называются стеком драйверов внешней памяти (storage stack). Ha рис. 10-1 показаны все типы драйверов, которые могут присутствовать в стеке. B этой главе мы описываем поведение драйверов устройств, расположенных в стеке ниже уровня файловой системы. (O драйвере файловой системы см. главу 12.)Ntldr
Как вы уже видели в главе 4, первой частью процесса загрузки операционной системы Windows дирижирует Ntldr. Хотя с технической точки зрения Ntldr не является частью стека внешней памяти, он участвует в управлении ею, поскольку предоставляет поддержку для доступа к дисковым устройствам до того, как начнет работать подсистема ввода-вывода Windows. Он находится на системном томе и запускается кодом, размещенным в загрузочном секторе этого тома. Ntldr считывает с системного тома файл Boot.ini и предлагает пользователю выбрать вариант загрузки. Имена разделов в Boot.ini представлены в виде multi(0)disk(0)rdisk(0)partition(l). Эти имена являются частью стандартной схемы именования разделов Advanced RISC Computing (ARC), используемой микрокодом Alpha и других RISC-процессоров. Ntldr транслирует имя выбранного пользователем элемента Boot.ini в имя загрузочного раздела и загружает в память системные файлы Windows (начиная с реестра, Ntoskrnl.exe и загрузочных драйверов). Bo всех случаях Ntldr использует BIOS для чтения диска, содержащего системный том, но, как описано в главе 4, иногда полагается на функции минипорт-драйвера диска для чтения с диска, где находится загрузочный том.Драйвер класса дисков, порт- и минипорт-драйверы
При инициализации диспетчер ввода-вывода запускает драйверы жестких дисков. Драйверы устройств внешней памяти в Windows соответствуют архитектуре «класс-порт-минипорт». Согласно этой архитектуре, Microsoft предоставляет драйвер класса внешней памяти, который реализует функциональность, общую для всех устройств внешней памяти, и порт-драйвер, который поддерживает функциональность, общую для конкретной шины, например SCSI (Small Computer System Interface) или IDE (Integrated Device Electronics). A изготовители оборудования поставляют минипорт-драйверы, подключаемые к порт-драйверам и формирующие интерфейс между Windows и конкретными устройствами.B архитектуре драйверов дисковой памяти только драйверы класса имеют стандартные интерфейсы драйверов устройств Windows. Минипорт-драйверы вместо интерфейса драйверов устройств используют интерфейс порт-драйверов, который просто реализует набор процедур, служащих интерфейсом между Windows и минипорт-драйверами. Такой подход упрощает разработку минипорт-драйверов, поскольку Microsoft предоставляет порт-драйверы, специфичные для операционной системы, а также обеспечивает переносимость минипорт-драйверов на уровне двоичного кода между Windows 98, Windows Millennium Edition и Windows.
Windows включает драйвер класса дисков (\Windows\System32\Drivers\ Disk.sys), реализующий стандартную функциональность дисков. Windows также предоставляет разнообразные порт-драйверы дисков. Например, Scsi-port.sys – это порт-драйвер дисков, подключаемых к SCSI-шине, a Atapi.sys – порт-драйвер для систем на базе IDE. B Windows Server 2003 введен порт драйвер Storport.sys, заменяющий Scsiport.sys. Storport.sys был разработан для реализации функциональности высокопроизводительных аппаратных RAID-контроллеров и адаптеров Fibre ChanneI. Модель Storport аналогична Scsiport, что упрощает изготовителям задачу переноса существующих SCSI-минипортов под Storport. Минипорт-драйверы, создаваемые разработчиками для использования Storport, используют преимущества нескольких механизмов Storport, повышающих производительность, в частности поддержки параллельной инициации и завершения запросов на ввод-вывод в многопроцессорных системах, более управляемой архитектуры очереди запросов на ввод-вывод и выполнения большей части кода при более низком уровне IRQL, чтобы свести к минимуму длительность маскирования аппаратных прерываний.
Драйверы Scsiport.sys и Atapi.sys реализуют версию алгоритма планирования дисковых операций, известную под названием C-LOOK. Эти драйверы помещают запросы на дисковый ввод-вывод в списки с сортировкой по первому сектору, которому адресован запрос; этот сектор также называется номером логического блока (logical block number, LBN). C помощью функций KeInsertByKeyDeviceQueueи KeRemoveByKeyDeviceQueue(документированных в Windows DDK) они представляют запросы ввода-вывода как элементы (items) и используют начальный сектор запроса в качестве ключа, требуемого этими функциями. Обслуживая запросы, драйвер проходит по списку с самого младшего сектора до самого старшего. Достигнув конца списка, он возвращается в его начало, так как за это время в список могли быть вставлены новые запросы. Если адреса запросов распределены по всему диску, этот подход приводит к постоянному перемещению головок из начальной области диска к его концу. Storport.sys не реализует планирование дисковых операций, поскольку он в основном применяется для управления вводом-выводом, адресованным массивам накопителей, где нет четкого определения начала и конца диска.
C Windows поставляются некоторые минипорт-драйверы, включая Aha 154x.sys для SCSI-контроллеров семейства Adaptec 1540. B системах, где установлено минимум одно IDE-устройство на основе ATAPI, функциональность минипортов предоставляют драйверы Pciidex.sys и Pciide.sys. Один или несколько упомянутых драйверов присутствует в большинстве систем Windows.
Драйверы iSCSI
iSCSI – это транспортный протокол для дисковых устройств, который интегрирует протокол SCSI с TCP/IP, благодаря чему компьютеры могут взаимодействовать с блочными накопителями, включая диски, по IP-сетям. Архитектура сети устройств хранения данных (storage area networking, SAN) обычно базируется на сети Fibre ChanneI, но администраторы могут использовать iSCSI для создания сравнительно недорогих SAN на основе таких сетевых технологий, как гигабитная Ethernet, что позволяет обеспечить масштабируемость, защиту от катастроф, эффективное резервное копирование и защиту данных. B Windows поддержка iSCSI реализуется в виде Microsoft iSCSI Software Initiator, который можно скачать с сайта Microsoft и который работает в Windows 2000, Windows XP и Windows Server 2003.Microsoft iSCSI Software Initiator включает несколько компонентов.
(o) Initiator (инициатор)Этот необязательный компонент, состоящий из порт-драйвера iSCSI (\Windows\System32\Drivers\Iscsiprt.sys) и мини-порт-драйвера (\Windows\System32\Drivers\Msiscis.sys), использует драйвер TCP/IP для реализации программного iSCSI поверх стандартных Ethernet и TCP/IP при наличии сетевых адаптеров с аппаратным ускорением сетевых операций.
(o) Initiator Service (служба инициатора)Эта служба, реализованная в \Windows\System32\Iscsiexe.exe, управляет обнаружением и защитой всех инициаторов iSCSI, а также инициацией и завершением сеансов. Функциональность обнаружения устройств iSCSI реализована в \Windows\Sys tem32\Iscsium.dllи соответствует спецификации протокола Internet Storage Name Service (iSNS).
(o) Управляющие приложенияK ним относятся IscsicIi.exe (утилита командной строки для управления соединениями iSCSI-устройств и их защитой) и соответствующий апплет для Control PaneI (Панель управления). Некоторые изготовители выпускают iSCSI-адаптеры с аппаратным ускорением операций по протоколу iSCSI. Служба инициатора работает с этими адаптерами, и они должны поддерживать iSNS, чтобы все iSCSI-устройства, в том числе обнаруженные как службой инициатора, так и iSCSI-оборудова-нием, можно было распознавать и контролировать через стандартные интерфейсы Windows.
МРIO-драйверы
У большинства дисковых устройств только один путь(path) между ними и компьютером – набор адаптеров, кабелей и коммутаторов. B серверах, требующих высокого уровня готовности к работе, применяются решения с несколькими путями – между компьютером и диском существует более одного набора соединительного оборудования, чтобы при аварии одного пути система все равно могла бы обращаться к диску по альтернативному пути. Однако без поддержки со стороны операционной системы или драйверов диск с двумя путями будет виден как два разных диска. Windows включает поддержку ввода-вывода по нескольким путям (muItipath I/O, MPIO) для управления дисками с несколькими путями как одним диском; эта поддержка опирается на сторонние драйверы – модули, специфичные для конкретного устройства (device-specific modules, DSM). Эти модули берут на себя всю специфику управления путями, в том числе политику балансировки нагрузки, на основе которой выбирается путь передачи запросов ввода-вывода, и механизмы обнаружения ошибок, уведомляющие Windows об аварии того или иного пути. Поддержка MPIO доступна для Windows 2000 Server, Advanced Server, Datacenter Server и Windows Server 2003 в виде Microsoft MPIODriver Development Kit, который лицензируется поставщиками аппаратного и программного обеспечения.
B стеке драйверов внешней памяти Windows MPIO (рис. 10-2) Multipath Disk Driver Replacement (\Windows\System32\Drivers\Mpdev.sys) заменяет функциональность стандартного драйвера класса Disk.sys. Mpdev.sys захватывает во владение объект «устройство», представляющий диски с несколькими путями, чтобы для таких дисков существовал лишь один объект «устройство». Кроме того, этот драйвер отвечает за поиск подходящего DSM для управления путями к устройству. Multipath Bus Driver (\Windows\System32\Drivers\Mpio.sys) управляет соединениями между компьютером и устройством, в том числе обеспечивая управление электропитанием данного устройства. Mpdev.sys уведомляет Mpio.sys о наличии устройств, которые тот должен контролировать. Наконец, Multipath Port Filter (\Windows\System32 \Drivers\Mpsfltr.sys) размещается поверх порт-драйвера для диска с несколькими путями и управляет информацией, передаваемой вверх по стеку устройств.
ЭКСПЕРИМЕНТ: наблюдение за вводом-выводом на физическом диске
C помощью механизма Event Tracing for Windows (см. главу 3) драйвера класса дисков утилита Diskmon от Sysinternals ведет мониторинг активности ввода-вывода на физических дисках и отображает ее в своем окне. Содержимое этого окна обновляется раз в секунду. Для каждой операции Diskmon показывает время, длительность, номер целевого диска, тип и смещение, а также длину.
Объекты «устройство» для дисков
Драйвер класса дисков создает объекты «устройство», представляющие диски и дисковые разделы. Имена таких объектов имеют вид \Device\HarddiskA^\ DRX, где X –номер диска. Для идентификации разделов и создания объектов «устройство», представляющих эти разделы, драйвер класса дисков в Windows 2000 использует функцию IoReadPartitionTableдиспетчера ввода-вывода, а в Windows XP и Windows Server 2003 – функцию IoReadParitition-TableEx.Драйвер класса дисков вызывает одну из этих функций для каждого диска, представленного минипорт-драйвером драйверу класса на ранних стадиях загрузки системы. A функция инициирует дисковый ввод-вывод на уровне секторов, поддерживаемый драйвером класса, порт- и минипорт-драйверами, для считывания MBR- или GPT-таблицы разделов (об этом мы расскажем позже) и для формирования внутреннего представления жестких разделов диска. Драйвер класса дисков создает объекты «устройство», представляющие все главные разделы (в том числе логические диски внутри дополнительных разделов), которые этот драйвер получает IoReadPartitionTableили IoReadParititionTableEx.Вот пример имени объекта раздела:\Device\Harddisk0\DP(1)0x7e000-0x7ff50c00+2
Это имя идентифицирует первый раздел первого диска системы. Два первых шестнадцатеричных числа (0x7e000 и 0x7ff50c00) определяют начало и длину раздела, а последнее число – внутренний идентификатор, назначенный драйвером класса.
Для совместимости с приложениями, использующими правила именования, принятые в Windows NT 4, драйвер класса дисков формирует для имен в формате Windows NT 4 символьные ссылки на объекты «устройство», созданные драйвером. Например, драйвер класса создает ссылки \Device\Harddisk0\PartitionO на \Device\Harddisk0\DRO и \Device\Harddisk0\Partitionl на объект «устройство» первого раздела первого диска. B Windows драйвер класса создает такие же символьные ссылки, представляющие физические диски, созданные в системах под управлением Windows NT 4. Так, ссылка \??\PhysicalDrive0 указывает на \Device\Harddisk0\DRO. Ha рис. 10-3 показана утилита Winobj (от Sysinternals), которая отображает содержимое каталога Harddisk базового диска.