Страница:
Окончательно проверяют работоспособность самодельного фоторезистора авометром (рис. 51). Эмит — терный вывод фототранзистора присоедините к тому зажиму прибора, который соединён с плюсовым полюсом внутренней батареи. Базовый вывод оставьте свободным.
Когда на фототранзистор не попадает свет (прикройте его плотной бумагой), авометр должен показывать сопротивление более 50 кОм.
Теперь поднесите к фототранзистору включённую настольную лампу так, чтобы ещё лучи падали на кристалл под прямым углом со стороны эмиттерного вывода. Стрелка омметра должна тут же отметить резкое уменьшение проходного сопротивления. На расстоянии 5… 10 см от лампы проходное сопротивление коллектор — эмиттер фототранзистора должно упасть до 100…200 Ом.
Поверните фототранзистор на 90° по отношению к его оси. Сопротивление увеличится в 5… 10 раз. О причине можно легко догадаться — лучи света стали теперь попадать только на часть кристалла. Уменьшилась поверхность облучения — уменьшилась и чувствительность фотоэлемента. Отсюда вывод: совершенно небезразлично, как устанавливать фототранзистор по отношению к лучу света. Если этого не учитывать, изготовленные вами фотореле будут работать ненадёжно. Конечно, самодельные фотоприёмники менее чувствительны и надёжны по сравнению с выпускаемыми промышленностью.
 Рис. 51 Самодельный фототранзистор
Рис. 51 Самодельный фототранзистор
Моделирование светочувствительных устройств из радиокубиков. Из радиокубиков можно собрать несколько таких устройств и проанализировать их работу. Перечислим самые простые из них: фоторезистор в цепи постоянного тока: фотореле с усилителем на транзисторе: автомат включения освещения: автомат ночной сш нализации.
Фоторезистор в цепи постоянного тока — устройство, составленное из последовательно включённых фоторезистора ФСК — 1, измерительного прибора — миллиамперметра и источника питания, даёт возможность продемонстрировать свойство полупроводников (фоторезисторов) изменять сопротивление электрическому току под воздействием на них света.
При освещении фоторезистора светом сопротивление ею уменьшается, ток в цепи увеличивается, что отмечает миллиамперметр.
Фотореле с усилителем на одном транзисторе (рис. 52, а). Простая схема фотореле может быть применена при построении системы, управляемой светом. Фотореле выполнено на транзисторе VT1, который играет роль усилителя постоянного тока. Нагрузкой служит обмотка электромагнитного реле К1. При нажатии на кнопку SB1 реле не срабатывает, если фоторезистор затемнён. Если на фоторезистор направить свет, то его сопротивление уменьшится, транзистор откроется и реле сработает. Сопротивление токоограничительного резистора R1 зависит от параметров выбранной лампы.
Фотореле с усилителем на двух транзисторах (рис. 52, б) содержит двухступенный усилитель постоянного тока. Нагрузкой транзистора VT2 является обмотка реле. Это фотореле более чувствительно к малым световым потокам.
Чувствительное фоторел e с усилителем на транзисторах (рис. 52. в) собрано на двух транзисторах, которые работают в усилителе постоянного тока. Фотореле чувствительно к малым световым сигналам.
 Рис. 52. Фотореле с усилителями на транзисторах
Рис. 52. Фотореле с усилителями на транзисторах
Автомат включения освещения (рис. 53) позволяет автоматически включать освещение при наступлении темноты. Исполнительное устройство подключают к контактам реле.
Автомат ночной сигнализации (рис. 54) представляет собой генератор световых сигнальных импульсов. Он начинает работать только при наступлении темноты или при затемнении фоторезистора. Длительность сигналов можно изменять подборкой конденсатора в пределах 5… 100 мкФ.
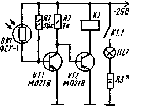 Рис. 53. Автомат включения освещения
Рис. 53. Автомат включения освещения
 Рис. 54. Автомат ночной сигнализации
Рис. 54. Автомат ночной сигнализации
Некоторые из рассмотренных устройств можно использовать в роботе, в его светочувствительном блоке.
ЗДРАВСТВУЙ, МИКРОЭЛЕКТРОНИКА!
7. ОСЯЗАНИЕ РОБОТОВ
КОНСТРУИРОВАНИЕ СЕНСОРНЫХ УСТРОЙСТВ
8. МОДЕЛИРОВАНИЕ НЕРВНОЙ СИСТЕМЫ (НЕЙРОНЫ И НЕЙРОННЫЕ СЕТИ)
КИБЕРНЕТИКА И НЕРВНАЯ СИСТЕМА
НЕЙРОНЫ
Когда на фототранзистор не попадает свет (прикройте его плотной бумагой), авометр должен показывать сопротивление более 50 кОм.
Теперь поднесите к фототранзистору включённую настольную лампу так, чтобы ещё лучи падали на кристалл под прямым углом со стороны эмиттерного вывода. Стрелка омметра должна тут же отметить резкое уменьшение проходного сопротивления. На расстоянии 5… 10 см от лампы проходное сопротивление коллектор — эмиттер фототранзистора должно упасть до 100…200 Ом.
Поверните фототранзистор на 90° по отношению к его оси. Сопротивление увеличится в 5… 10 раз. О причине можно легко догадаться — лучи света стали теперь попадать только на часть кристалла. Уменьшилась поверхность облучения — уменьшилась и чувствительность фотоэлемента. Отсюда вывод: совершенно небезразлично, как устанавливать фототранзистор по отношению к лучу света. Если этого не учитывать, изготовленные вами фотореле будут работать ненадёжно. Конечно, самодельные фотоприёмники менее чувствительны и надёжны по сравнению с выпускаемыми промышленностью.
Моделирование светочувствительных устройств из радиокубиков. Из радиокубиков можно собрать несколько таких устройств и проанализировать их работу. Перечислим самые простые из них: фоторезистор в цепи постоянного тока: фотореле с усилителем на транзисторе: автомат включения освещения: автомат ночной сш нализации.
Фоторезистор в цепи постоянного тока — устройство, составленное из последовательно включённых фоторезистора ФСК — 1, измерительного прибора — миллиамперметра и источника питания, даёт возможность продемонстрировать свойство полупроводников (фоторезисторов) изменять сопротивление электрическому току под воздействием на них света.
При освещении фоторезистора светом сопротивление ею уменьшается, ток в цепи увеличивается, что отмечает миллиамперметр.
Фотореле с усилителем на одном транзисторе (рис. 52, а). Простая схема фотореле может быть применена при построении системы, управляемой светом. Фотореле выполнено на транзисторе VT1, который играет роль усилителя постоянного тока. Нагрузкой служит обмотка электромагнитного реле К1. При нажатии на кнопку SB1 реле не срабатывает, если фоторезистор затемнён. Если на фоторезистор направить свет, то его сопротивление уменьшится, транзистор откроется и реле сработает. Сопротивление токоограничительного резистора R1 зависит от параметров выбранной лампы.
Фотореле с усилителем на двух транзисторах (рис. 52, б) содержит двухступенный усилитель постоянного тока. Нагрузкой транзистора VT2 является обмотка реле. Это фотореле более чувствительно к малым световым потокам.
Чувствительное фоторел e с усилителем на транзисторах (рис. 52. в) собрано на двух транзисторах, которые работают в усилителе постоянного тока. Фотореле чувствительно к малым световым сигналам.
Автомат включения освещения (рис. 53) позволяет автоматически включать освещение при наступлении темноты. Исполнительное устройство подключают к контактам реле.
Автомат ночной сигнализации (рис. 54) представляет собой генератор световых сигнальных импульсов. Он начинает работать только при наступлении темноты или при затемнении фоторезистора. Длительность сигналов можно изменять подборкой конденсатора в пределах 5… 100 мкФ.
Некоторые из рассмотренных устройств можно использовать в роботе, в его светочувствительном блоке.
ЗДРАВСТВУЙ, МИКРОЭЛЕКТРОНИКА!
Современная микроэлектронная техника позволяет создать малогабаритные и высокочувствительные системы зрения самого различного назначения.
На рис. 55 приведена принципиальная схема фотореле с цифровым логическим элементом. Датчиком служит фотодиод BD1, который подключён непосредственно к входам элемента DD1.1 (К155ЛБЗ).
Когда фотодиод освещён, его сопротивление мало и напряжение на выходе инвертора DD1.1 близко к нулю. На выходе элемента — высокий уровень, который закрывает транзистор VT1. Реле К1 отключается.
Стоит прервать световой поток, как сопротивление фотодиода увеличится, транзистор откроется, реле включится.
Порядок работы фотореле можно изменить — заставить реле срабатывать при освещении. Для этого вместо одного следует включить последовательно два инвертора.
 Рис. 55. Микроэлектронное реле
Рис. 55. Микроэлектронное реле
Микроэлектронная система обнаружения пламени. В условиях современных роботизированных цехов особое значение имеют системы предупреждения о пожарной опасности. Ими можно оснастить самих роботов. Применение для обнаружения пламени темпера — турно — световых датчиков в ряде случаев оказывается нецелесообразным, так как они срабатывают не только при возникновении или исчезновении пламени, но и по разным другим причинам, например при случайном увеличении освещённости, повышении температуры. Поэтому при использовании таких датчиков необходимо принимать зачастую очень сложные меры, чтобы исключить ложные срабатывания. Очевидно, что для чёткого обнаружения пламени необходимы датчики, действие которых основано на изменении факторов, непосредственно характеризующих пламя.
Для открытого пламени, как показывает практика, наиболее характерна пульсация его инфракрасного и ультрафиолетового излучения — интенсивность различных видов излучения пламени не остаётся постоянной, а изменяется во времени. Явление пульсации, обусювленное физическими процессами, происходящими при горении, можно наблюдать, в частности, на примере обычной газовой юрелки.
Как показали опыты, пульсация характеристик пламени многих горючих материалов, в том числе при искусственном распылении топлива (например, в топках котлов и других теплоустановок), происходит с частотой, лежащей в пределах 15…30 Гц.
На рис. 55 приведена принципиальная схема фотореле с цифровым логическим элементом. Датчиком служит фотодиод BD1, который подключён непосредственно к входам элемента DD1.1 (К155ЛБЗ).
Когда фотодиод освещён, его сопротивление мало и напряжение на выходе инвертора DD1.1 близко к нулю. На выходе элемента — высокий уровень, который закрывает транзистор VT1. Реле К1 отключается.
Стоит прервать световой поток, как сопротивление фотодиода увеличится, транзистор откроется, реле включится.
Порядок работы фотореле можно изменить — заставить реле срабатывать при освещении. Для этого вместо одного следует включить последовательно два инвертора.
Микроэлектронная система обнаружения пламени. В условиях современных роботизированных цехов особое значение имеют системы предупреждения о пожарной опасности. Ими можно оснастить самих роботов. Применение для обнаружения пламени темпера — турно — световых датчиков в ряде случаев оказывается нецелесообразным, так как они срабатывают не только при возникновении или исчезновении пламени, но и по разным другим причинам, например при случайном увеличении освещённости, повышении температуры. Поэтому при использовании таких датчиков необходимо принимать зачастую очень сложные меры, чтобы исключить ложные срабатывания. Очевидно, что для чёткого обнаружения пламени необходимы датчики, действие которых основано на изменении факторов, непосредственно характеризующих пламя.
Для открытого пламени, как показывает практика, наиболее характерна пульсация его инфракрасного и ультрафиолетового излучения — интенсивность различных видов излучения пламени не остаётся постоянной, а изменяется во времени. Явление пульсации, обусювленное физическими процессами, происходящими при горении, можно наблюдать, в частности, на примере обычной газовой юрелки.
Как показали опыты, пульсация характеристик пламени многих горючих материалов, в том числе при искусственном распылении топлива (например, в топках котлов и других теплоустановок), происходит с частотой, лежащей в пределах 15…30 Гц.
7. ОСЯЗАНИЕ РОБОТОВ
Создание по — настоящему разумного робота невозможно без датчиков, подобных органам чувств человека. О состоянии собственного тела мы можем судить и с закрытыми глазами — от нервных центров в мозт передаётся вся нужная информация. Системой «очувствления» должны обладать и самоуправляемые роботы. Англизируя информацию о состоянии внешней среды и своём собственном, ЭВМ принимает решение о составе и последовательности действий.
Первым чувством, которому «научили» роботов, было осязание. Датчики давления, температуры, влажности, встроенные в пальцы руки, позволяют роботу определять, есть ли рядом нужный предмет, каковы его размеры, форма, температура поверхности. Осязательными (тактильными) датчиками оснащены роботы третьего поколения. Движущиеся, ходячие роботы оповещаются о приближении к препятствию специальными антеннами.
Роботы, которые предназначены для сборки, должны уметь распознавать отдельные детали. В последнее время появилась возможность создания искусственных органов осязания, заменяющих пальцы рук человека. В качестве искусственных, ощупывающих окружающие предметы органов осязания используются ёмкостные, индукционные, температурные, радиоактивные и ультразвуковые щупы — датчики, которые способны превращать воздействия, получаемые ими от ощупываемого предмета, в определённые электрические сигналы.
Среди наиболее простых и наиболее распространённых датчиков внешней информации можно отметить так называемые контактные датчики. На концах схвата — руки робота устанавливают специальные выключатели, которые фиксируют факт прикосновения к детали или станку и посылают импульс в мозг робота. Десяток таких выключателей, расположенных не только внутри пальцев схвата, но и на наружной его поверхности (сверху, снизу, справа и слева), помогают роботу «на ощупь» определить положение детали или возникшего препятствия.
Однако человек, манипулируя предметом, фиксирует не только факт соприкосновения, но и ощущает давление руки на предмет через кожу и таким образом может регулировать усилие сжатия соответственно массе и прочности предмета. Такой датчик представляет собой, например, слой электропроводящего вспененного полиуретана, заключённого между тонкими металлическими пластинками. В зависимости от давления расстояние между пластинами меняется. Соответственно изменяется электрическое сопротивление цепи. Эти свойства искусственной чувствительной кожи уже используют при протезировании.
В качестве весьма грубого примера конструкции схвата манипулятора, ощущающего предметы, рассмотрим устройство манипулятора Эрнста (рис. 56), собранного им в конце 1961 года. Манипулятор оснащён двумя группами датчиков. Одну образуют датчики, установленные во всех подвижных сочленениях. Они посылают информацию о том, как механизм выполняет сигналы, управляющие движением всех сочленений руки. Это датчики внутренней обратной связи. Система непрерывно сравнивает те положения руки, которые задаёт управляющая машина, с положениями, которые рука занимает в действительности, и в соответствии с результатами этого сравнения ЭЦВМ непрерывно генерирует сигналы управления, устраняющие рассогласование, заставляя механическую руку занимать нужные положения и нужным образом менять их.
Вторая группа датчиков установлена на схвате. Именно эти датчики связывают руку с внешним миром. Схват, как обычно состоит из двух пальцев. Верхняя, нижняя и передняя плоскости каждого пальца оснащены контактными датчиками, работающими в двоичном коде: включён — выключен. Эти датчики сигнализируют о том, что рука наткнулась на объект нерабочим участком. На внутренней и рабочей передней плоскостях каждого пальца расположено ещё по восемь датчиков. Они работают уже не в двоичном коде, а генерируют сигналы, уровень которых пропорционален силе нажатия на датчик. Шесть из них расположены на рабочих плоскостях схвата и информируют о том, какие части плоскостей участвуют в схвате и с какой силой пальцы сжимают объект.
 Рис. 56. Манипулятор Эрнста:
Рис. 56. Манипулятор Эрнста:
1 — датчик, определяющий положение объекта между пальцами схвата; 2 — датчик сигнализации соприкосновения с нерабочими участками пальцев; 3 — датчик, сигнализирующий о расположении схватываемого объекта; 4 — фотодиод, реагирующий на тень объекта; 5 — датчики, сигнализирующие о соприкосновении с объектом; 6 — датчик, включающийся при соприкосновении руки со столом
Два датчика, расположенные на передних плоскостях пальцев, регистрируют силу сопротивления движению схвата со стороны объекта. В случае, если рука с ним сталкивается в процессе движения, эти датчики позволяют получить информацию о протяжённости и размерах этого объекта.
Таким образом, схват — его рабочие и нерабочие поверхности — снабжён подобием осязания и очувствлен по силе сжатия. Кроме того, на передних поверхностях пальцев между датчиками осязания помещено по глазу — фотодиоду, реагирующему на затенение: когда рука приближается к какому — либо объекту, но ещё не коснулась его, в машину поступает сигнал о приближении и о необходимости снизить скорость перемещения. ЭЦВМ принимает, обрабатывает и использует принятую информацию при реализации заданной программы.
Манипулятор Эрнста работает как робот с «завязанными глазами». Датчики, которыми он оснащён, собирают информацию вслепую — осязанием, «на ощупь». Он не может отделить процесс сбора информации от процесса движения, сначала получить представление о ситуации, сложившейся во внешнем мире, и только затем начать действовать. Именно поэтому он вынужден искать их один за другим. А настоящий робот должен иметь такие органы чувств, которые дали бы ему возможность предпослать движению сбор информации.
Первым чувством, которому «научили» роботов, было осязание. Датчики давления, температуры, влажности, встроенные в пальцы руки, позволяют роботу определять, есть ли рядом нужный предмет, каковы его размеры, форма, температура поверхности. Осязательными (тактильными) датчиками оснащены роботы третьего поколения. Движущиеся, ходячие роботы оповещаются о приближении к препятствию специальными антеннами.
Роботы, которые предназначены для сборки, должны уметь распознавать отдельные детали. В последнее время появилась возможность создания искусственных органов осязания, заменяющих пальцы рук человека. В качестве искусственных, ощупывающих окружающие предметы органов осязания используются ёмкостные, индукционные, температурные, радиоактивные и ультразвуковые щупы — датчики, которые способны превращать воздействия, получаемые ими от ощупываемого предмета, в определённые электрические сигналы.
Среди наиболее простых и наиболее распространённых датчиков внешней информации можно отметить так называемые контактные датчики. На концах схвата — руки робота устанавливают специальные выключатели, которые фиксируют факт прикосновения к детали или станку и посылают импульс в мозг робота. Десяток таких выключателей, расположенных не только внутри пальцев схвата, но и на наружной его поверхности (сверху, снизу, справа и слева), помогают роботу «на ощупь» определить положение детали или возникшего препятствия.
Однако человек, манипулируя предметом, фиксирует не только факт соприкосновения, но и ощущает давление руки на предмет через кожу и таким образом может регулировать усилие сжатия соответственно массе и прочности предмета. Такой датчик представляет собой, например, слой электропроводящего вспененного полиуретана, заключённого между тонкими металлическими пластинками. В зависимости от давления расстояние между пластинами меняется. Соответственно изменяется электрическое сопротивление цепи. Эти свойства искусственной чувствительной кожи уже используют при протезировании.
В качестве весьма грубого примера конструкции схвата манипулятора, ощущающего предметы, рассмотрим устройство манипулятора Эрнста (рис. 56), собранного им в конце 1961 года. Манипулятор оснащён двумя группами датчиков. Одну образуют датчики, установленные во всех подвижных сочленениях. Они посылают информацию о том, как механизм выполняет сигналы, управляющие движением всех сочленений руки. Это датчики внутренней обратной связи. Система непрерывно сравнивает те положения руки, которые задаёт управляющая машина, с положениями, которые рука занимает в действительности, и в соответствии с результатами этого сравнения ЭЦВМ непрерывно генерирует сигналы управления, устраняющие рассогласование, заставляя механическую руку занимать нужные положения и нужным образом менять их.
Вторая группа датчиков установлена на схвате. Именно эти датчики связывают руку с внешним миром. Схват, как обычно состоит из двух пальцев. Верхняя, нижняя и передняя плоскости каждого пальца оснащены контактными датчиками, работающими в двоичном коде: включён — выключен. Эти датчики сигнализируют о том, что рука наткнулась на объект нерабочим участком. На внутренней и рабочей передней плоскостях каждого пальца расположено ещё по восемь датчиков. Они работают уже не в двоичном коде, а генерируют сигналы, уровень которых пропорционален силе нажатия на датчик. Шесть из них расположены на рабочих плоскостях схвата и информируют о том, какие части плоскостей участвуют в схвате и с какой силой пальцы сжимают объект.
1 — датчик, определяющий положение объекта между пальцами схвата; 2 — датчик сигнализации соприкосновения с нерабочими участками пальцев; 3 — датчик, сигнализирующий о расположении схватываемого объекта; 4 — фотодиод, реагирующий на тень объекта; 5 — датчики, сигнализирующие о соприкосновении с объектом; 6 — датчик, включающийся при соприкосновении руки со столом
Два датчика, расположенные на передних плоскостях пальцев, регистрируют силу сопротивления движению схвата со стороны объекта. В случае, если рука с ним сталкивается в процессе движения, эти датчики позволяют получить информацию о протяжённости и размерах этого объекта.
Таким образом, схват — его рабочие и нерабочие поверхности — снабжён подобием осязания и очувствлен по силе сжатия. Кроме того, на передних поверхностях пальцев между датчиками осязания помещено по глазу — фотодиоду, реагирующему на затенение: когда рука приближается к какому — либо объекту, но ещё не коснулась его, в машину поступает сигнал о приближении и о необходимости снизить скорость перемещения. ЭЦВМ принимает, обрабатывает и использует принятую информацию при реализации заданной программы.
Манипулятор Эрнста работает как робот с «завязанными глазами». Датчики, которыми он оснащён, собирают информацию вслепую — осязанием, «на ощупь». Он не может отделить процесс сбора информации от процесса движения, сначала получить представление о ситуации, сложившейся во внешнем мире, и только затем начать действовать. Именно поэтому он вынужден искать их один за другим. А настоящий робот должен иметь такие органы чувств, которые дали бы ему возможность предпослать движению сбор информации.
КОНСТРУИРОВАНИЕ СЕНСОРНЫХ УСТРОЙСТВ
Как мы уже говорили, неотъемлемой частью систем осязания роботов являются сенсорные устройства, вызывающие срабатывание механизмов ориентации и захвата предметов. Контактное управление все чаще находит сейчас применение в разных областях. В обыденной жизни можно встретиться с этим способом управления в лифте. В современных лифтах вместо обычных кнопок устанавливаются на панели сенсорные контакты — неподвижные металлические пластины, при прикосновении к которым приходит в действие механизм лифта.
Что это за система управления, как она работает и каковы её преимущества? Сенсорное управление имеет одно преимущество — в нём нет электрических контактов — одного из самых ненадёжных звеньев электронной аппаратуры. Именно благодаря этому бесконтактное управление нашло широкое распространение. В частности, сенсорными переключателями каналов оснащены многие современные телевизоры.
Как работает система сенсорного управления? Различают два способа воздействия: ёмкостное и резистивное.
Тело человека имеет определённую довольно большую ёмкость (рис. 57) относительно окружающих проводящих предметов. Поэтому, когда человек прикасается к металлической пластине — сенсорному контакту (или короче — сенсору), резко изменяется ёмкость, приведённая к входу аппарата. На этом основана работа ёмкостного сенсора.
В резистивном сенсоре использовано сопротивление покрова пальца (рис. 58). В этом случае сенсор состоит из двух изолированных металлических пластин, которые замыкают пальцем при прикосновении.
Самая простая система сенсорного управления подобного рода может выглядеть так, как представлено на рис. 59. В исходном состоянии, т. е. тогда, когда мы не касаемся сенсора Е1 пальцем, через транзистор VT1 течёт очень слабый ток, поэтому напряжение на его коллекторе равно напряжению питания (на резисторе R1 почти нет падения напряжения). Прикосновение пальца к обеим частям сенсора равнозначно включению резистора между источником питания и базой транзистора. Таким образом, появляется базовый ток, что вызовет увеличение тока через цепь коллектора и включённый там резистор. При этом напряжение на коллекторе немедленно уменьшится — на выходе сформируется так называемый перепад напряжения. Если убрать палец с сенсора, напряжение на выходе восстановится. Таким простым способом — прикосновением пальца к сенсору — мы вызываем образование импульсов напряжения на выходе устройства.
 Рис. 57. Ёмкостный сенсор
Рис. 57. Ёмкостный сенсор
 Рис. 58. Резистивнъш сенсор
Рис. 58. Резистивнъш сенсор
 Рис. 59. Система контактного управления
Рис. 59. Система контактного управления
Зная, как образуются управляющие электрические импульсы, можно сравнительно просто собирать различные устройства, выполняющие те или иные задачи. Так на рис. 60, а представлена структурная схема узла управления освещением. Мы видим здесь три основных составных элемента: сенсор Е1, усилитель сигнала, электронный переключатель — триггер, усилитель постоянного тока и его нагрузка — её роль играет лампа накаливания HL1. Принципиальная схема устройства показана на рис. 60,6. Электрические импульсы с выхода усилителя на транзисторе VT1 переключают триггер, собранный на транзисторах VT2, VT3. Триггер переходит из одного устойчивого состояния в другое, когда открыт то один из его транзисторов, то другой.
Когда открыт транзистор VT3, то закрыт транзистор VT4 усилителя тока и лампа не горит. Она загорается при закрывании транзистора. В устройстве использована лампа на напряжение 6 В и ток 0,1 А.
В устройстве можно применить любые германиевые транзисторы малой мощности. Германиевые диоды — тоже любые. Важно лишь, чтобы в триггере были однотипные транзисторы и однотипные диоды. Источник питания — две батареи 3336, соединённые последовательно.
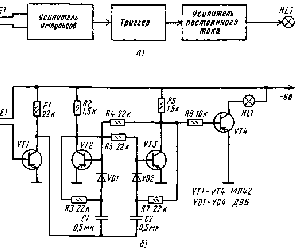 Рис. 60. Сенсорная система управления освещением: а) монтажная схема, б) структурная схема
Рис. 60. Сенсорная система управления освещением: а) монтажная схема, б) структурная схема
После того как устройство будет смакетировано и проверено, его можно установить в корпус настольной лампы. На рис. 61 показано примерное размещение отдельных узлов и деталей в корпусе лампы. Сенсорный выключатель. Этим устройством можно заменить выключатели электроосветительных приборов, телевизора, радиоприёмника. Многие уже, наверное, сталкивались с таким явлением: если прикоснуться пальцем к тока. Вот этим, казалось бы, вредным эффектом можно воспользоваться, собрав сенсорное устройство, схема которого приведена на рис. 62. Если прикоснёмся пальцем к сенсорному контакту Е1, через конденсатор С1 к затвору полевого транзистора VT1 (в исходном состоянии он открыт) будет приложено небольшое переменное напряжение. Ступень на транзисторе VT1 представляет собой усилитель — ограничитель.
 Рис. 61. Сенсорное устройство управления ночным освещением
Рис. 61. Сенсорное устройство управления ночным освещением
 Рис. 62. Транзисторное сенсорное устройство
Рис. 62. Транзисторное сенсорное устройство
Усилитель постоянного тока на транзисторах VT2 и VT3 необходим для усиления сигнала по мощности до уровня, достаточного для срабатывания реле К1. Контакты этого реле коммутируют исполнительные цепи. Конденсатор С2, которым зашунтировано реле, сглаживает пульсации, напряжения на обмотке. Стабилитрон в цепи эмиттера выходного транзистора обеспечивает помехоустойчивость устройства.
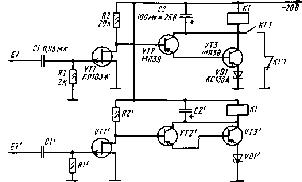 Рис. 63. Сенсорный выключатель
Рис. 63. Сенсорный выключатель
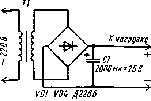 Рис. 64 Схема блока питания
Рис. 64 Схема блока питания
На рис. 63 приведена схема ещё одного варианта сенсорного выключателя, способного включать и выключать бытовые приборы. Он состоит из двух ячеек, подобных описанной выше. В момент прикосновения к сенсору Е1 срабатывает реле К1. Контактами К1.2 (на схеме не показаны) оно включает исполнительную цепь и самоблокируется через контакты К 1.1 и К ГЛ. Для отключения прибора от сети достаточно прикоснуться пальцем к сенсору Е1. Срабатывает реле КГ, цепь самоблокировки разрывается, и реле К1 возвращается в исходное состояние. Для этих сенсорных устройств можно сделать простейший блок питания. Его схему вы видите на рис. 64.
Во всех устройствах могут быть применены следующие реле: РСМ2 (паспорт Ю.171.81.56), РЭС22 (РФ4.500.129), РЭС22 (РФ4.500.131). Помимо этого, везде, кроме первой ячейки переключателя, могут быть использованы реле: РЭС10 (РС4.524.303), РЭС15 (РС4.591.003), РЭС15 (РС4.591.004) с одной группой контактов.
В качестве сетевого трансформатора Т1 блока питания использован выходной трансформатор кадровой развёртки ТВК 110ЛМ от телевизора. Этот трансформатор имеет три обмотки (1 — 2400 витков провода ПЭВ — 1 0,14). Переделка трансформатора заключается в том, что к обмотке II следует добавить ещё 30 витков, намотанных тем же проводом. Обмотку III можно удалить. Если же вам удастся достать реле РЭС22 (паспорт РФ4.500.129), трансформатор можно не переделывать.
Что это за система управления, как она работает и каковы её преимущества? Сенсорное управление имеет одно преимущество — в нём нет электрических контактов — одного из самых ненадёжных звеньев электронной аппаратуры. Именно благодаря этому бесконтактное управление нашло широкое распространение. В частности, сенсорными переключателями каналов оснащены многие современные телевизоры.
Как работает система сенсорного управления? Различают два способа воздействия: ёмкостное и резистивное.
Тело человека имеет определённую довольно большую ёмкость (рис. 57) относительно окружающих проводящих предметов. Поэтому, когда человек прикасается к металлической пластине — сенсорному контакту (или короче — сенсору), резко изменяется ёмкость, приведённая к входу аппарата. На этом основана работа ёмкостного сенсора.
В резистивном сенсоре использовано сопротивление покрова пальца (рис. 58). В этом случае сенсор состоит из двух изолированных металлических пластин, которые замыкают пальцем при прикосновении.
Самая простая система сенсорного управления подобного рода может выглядеть так, как представлено на рис. 59. В исходном состоянии, т. е. тогда, когда мы не касаемся сенсора Е1 пальцем, через транзистор VT1 течёт очень слабый ток, поэтому напряжение на его коллекторе равно напряжению питания (на резисторе R1 почти нет падения напряжения). Прикосновение пальца к обеим частям сенсора равнозначно включению резистора между источником питания и базой транзистора. Таким образом, появляется базовый ток, что вызовет увеличение тока через цепь коллектора и включённый там резистор. При этом напряжение на коллекторе немедленно уменьшится — на выходе сформируется так называемый перепад напряжения. Если убрать палец с сенсора, напряжение на выходе восстановится. Таким простым способом — прикосновением пальца к сенсору — мы вызываем образование импульсов напряжения на выходе устройства.
Зная, как образуются управляющие электрические импульсы, можно сравнительно просто собирать различные устройства, выполняющие те или иные задачи. Так на рис. 60, а представлена структурная схема узла управления освещением. Мы видим здесь три основных составных элемента: сенсор Е1, усилитель сигнала, электронный переключатель — триггер, усилитель постоянного тока и его нагрузка — её роль играет лампа накаливания HL1. Принципиальная схема устройства показана на рис. 60,6. Электрические импульсы с выхода усилителя на транзисторе VT1 переключают триггер, собранный на транзисторах VT2, VT3. Триггер переходит из одного устойчивого состояния в другое, когда открыт то один из его транзисторов, то другой.
Когда открыт транзистор VT3, то закрыт транзистор VT4 усилителя тока и лампа не горит. Она загорается при закрывании транзистора. В устройстве использована лампа на напряжение 6 В и ток 0,1 А.
В устройстве можно применить любые германиевые транзисторы малой мощности. Германиевые диоды — тоже любые. Важно лишь, чтобы в триггере были однотипные транзисторы и однотипные диоды. Источник питания — две батареи 3336, соединённые последовательно.
После того как устройство будет смакетировано и проверено, его можно установить в корпус настольной лампы. На рис. 61 показано примерное размещение отдельных узлов и деталей в корпусе лампы. Сенсорный выключатель. Этим устройством можно заменить выключатели электроосветительных приборов, телевизора, радиоприёмника. Многие уже, наверное, сталкивались с таким явлением: если прикоснуться пальцем к тока. Вот этим, казалось бы, вредным эффектом можно воспользоваться, собрав сенсорное устройство, схема которого приведена на рис. 62. Если прикоснёмся пальцем к сенсорному контакту Е1, через конденсатор С1 к затвору полевого транзистора VT1 (в исходном состоянии он открыт) будет приложено небольшое переменное напряжение. Ступень на транзисторе VT1 представляет собой усилитель — ограничитель.
Усилитель постоянного тока на транзисторах VT2 и VT3 необходим для усиления сигнала по мощности до уровня, достаточного для срабатывания реле К1. Контакты этого реле коммутируют исполнительные цепи. Конденсатор С2, которым зашунтировано реле, сглаживает пульсации, напряжения на обмотке. Стабилитрон в цепи эмиттера выходного транзистора обеспечивает помехоустойчивость устройства.
На рис. 63 приведена схема ещё одного варианта сенсорного выключателя, способного включать и выключать бытовые приборы. Он состоит из двух ячеек, подобных описанной выше. В момент прикосновения к сенсору Е1 срабатывает реле К1. Контактами К1.2 (на схеме не показаны) оно включает исполнительную цепь и самоблокируется через контакты К 1.1 и К ГЛ. Для отключения прибора от сети достаточно прикоснуться пальцем к сенсору Е1. Срабатывает реле КГ, цепь самоблокировки разрывается, и реле К1 возвращается в исходное состояние. Для этих сенсорных устройств можно сделать простейший блок питания. Его схему вы видите на рис. 64.
Во всех устройствах могут быть применены следующие реле: РСМ2 (паспорт Ю.171.81.56), РЭС22 (РФ4.500.129), РЭС22 (РФ4.500.131). Помимо этого, везде, кроме первой ячейки переключателя, могут быть использованы реле: РЭС10 (РС4.524.303), РЭС15 (РС4.591.003), РЭС15 (РС4.591.004) с одной группой контактов.
В качестве сетевого трансформатора Т1 блока питания использован выходной трансформатор кадровой развёртки ТВК 110ЛМ от телевизора. Этот трансформатор имеет три обмотки (1 — 2400 витков провода ПЭВ — 1 0,14). Переделка трансформатора заключается в том, что к обмотке II следует добавить ещё 30 витков, намотанных тем же проводом. Обмотку III можно удалить. Если же вам удастся достать реле РЭС22 (паспорт РФ4.500.129), трансформатор можно не переделывать.
8. МОДЕЛИРОВАНИЕ НЕРВНОЙ СИСТЕМЫ (НЕЙРОНЫ И НЕЙРОННЫЕ СЕТИ)
КИБЕРНЕТИКА И НЕРВНАЯ СИСТЕМА
Многое в работе нервной системы человека до сих пор непонятно учёным. Тем не менее общие закономерности управления, установленные кибернетикой, справедливы и для неё. Кибернетика разрабатывает математические приёмы, позволяющие на основе внешних данных судить о поломке математической машины. Врач встречается с аналогичной задачей. На основе внешних признаков требуется установить характер заболевания. Основываясь на кибернетике, медицина использует разработанные ею методы для решения и этой задачи. Исследуя закономерности управления, общие для механизма и нервной системы, кибернетика должна оперировать понятиями, применимыми к тому и другому.
Как мозг, так и машина состоят из определённых элементов, которые в своей совокупности образуют единое целое — систему. Это можно сказать как о всём мире в целом, так и об отдельных его частях.
Искусственные управляющие устройства так же как мозг человека, относят к одному и тому же классу самоуправляющихся систем. Все такого рода самоуправляющиеся системы называют кибернетическими
Каждая система связана с внешним миром, который так или иначе влияет на неё и, в свою очередь, подвергается воздействиям с её стороны. Ту часть системы, которая воспринимает воздействие извне, называют входом, а ту, которой система действует на другие системы, — выход ом.
В одной системе может быть один, два или несколько входов и выходов. Регулятор Уатта, например, имеет один вход и один выход. На входе происходит изменение давления, на выходе — открывание или закрывание клапана. Человек как система имеет множество входов и выходов в виде нервных клеток, воспринимающих внешние воздействия и реагирующих на них.
Всякая кибернетическая система, как указывалось выше, является самоуправляющейся.
Но управление не сводится просто к передаче информации от управляющей части системы к исполнительному органу. Этот процесс гораздо сложнее.
Дело в том, что на исполнительный орган влияет не только управляющая система. Он подвержен непрерывным воздействиям окружающей среды, которые часто препятствуют исполнению приказов, полученных от управляющего центра. Например, корабль может отклониться от прямого пути под влиянием неожиданно поднявшегося ветра. Что предпринять в этом случае? Очевидно, нужно повернуть руль корабля так, чтобы он мог держать прежний курс. Противодействие случайным внешним влияниям — общий закон всякого регулирования.
Самый надёжный способ противодействовать внешним возмущениям — это сделать так, чтобы всякое отклонение фактического поведения от заданного, независимо от того, чем оно обусловлено, вызывало определённую ответную реакцию, направленную на ликвидацию этого отклонения. В таком случае не нужно изучать его причины, определять силу ветра, направление течения и т.д.; заданное направление поддерживается автоматически. Такой способ управления был найден. Нужно, чтобы кроме прямой связи устройства управления с исполнительной системой была обеспечена связь выхода исполнительной системы с входом управляющей (см. рис. 65). Эту дополнительную связь называют обратной.
Примеры обратной связи мы уже видели выше. Обратная связь, вызывающая в результате своего действия ослабление внешнего влияния, носит название отрицательной обратной связи. Принцип регулирования на основе отрицательной обратной связи находит применение в любой управляемой системе, будь то кибернетическая машина или живой организм.
Положение о том, что регулирование в живом организме, в том числе в центральной нервной системе человека, происходит на основе отрицательной обратной связи, иногда называют основной гипотезой кибернетики.
 Рис. 65. Обратная связь
Рис. 65. Обратная связь
Общий для кибернетических машин и живых организмов принцип обратной связи неслучаен. Ведь и те и другие вынуждены действовать в постоянно меняющихся условиях, поэтому реакции, вырабатываемые у них, должны отличаться разнообразием. Но для этого необходимо, чтобы из рабочего органа в центральную систему поступали соответствующие сигналы. Обратная связь лежит в основе восстановления и перестройки функций центральной нервной системы.
Как мозг, так и машина состоят из определённых элементов, которые в своей совокупности образуют единое целое — систему. Это можно сказать как о всём мире в целом, так и об отдельных его частях.
Искусственные управляющие устройства так же как мозг человека, относят к одному и тому же классу самоуправляющихся систем. Все такого рода самоуправляющиеся системы называют кибернетическими
Каждая система связана с внешним миром, который так или иначе влияет на неё и, в свою очередь, подвергается воздействиям с её стороны. Ту часть системы, которая воспринимает воздействие извне, называют входом, а ту, которой система действует на другие системы, — выход ом.
В одной системе может быть один, два или несколько входов и выходов. Регулятор Уатта, например, имеет один вход и один выход. На входе происходит изменение давления, на выходе — открывание или закрывание клапана. Человек как система имеет множество входов и выходов в виде нервных клеток, воспринимающих внешние воздействия и реагирующих на них.
Всякая кибернетическая система, как указывалось выше, является самоуправляющейся.
Но управление не сводится просто к передаче информации от управляющей части системы к исполнительному органу. Этот процесс гораздо сложнее.
Дело в том, что на исполнительный орган влияет не только управляющая система. Он подвержен непрерывным воздействиям окружающей среды, которые часто препятствуют исполнению приказов, полученных от управляющего центра. Например, корабль может отклониться от прямого пути под влиянием неожиданно поднявшегося ветра. Что предпринять в этом случае? Очевидно, нужно повернуть руль корабля так, чтобы он мог держать прежний курс. Противодействие случайным внешним влияниям — общий закон всякого регулирования.
Самый надёжный способ противодействовать внешним возмущениям — это сделать так, чтобы всякое отклонение фактического поведения от заданного, независимо от того, чем оно обусловлено, вызывало определённую ответную реакцию, направленную на ликвидацию этого отклонения. В таком случае не нужно изучать его причины, определять силу ветра, направление течения и т.д.; заданное направление поддерживается автоматически. Такой способ управления был найден. Нужно, чтобы кроме прямой связи устройства управления с исполнительной системой была обеспечена связь выхода исполнительной системы с входом управляющей (см. рис. 65). Эту дополнительную связь называют обратной.
Примеры обратной связи мы уже видели выше. Обратная связь, вызывающая в результате своего действия ослабление внешнего влияния, носит название отрицательной обратной связи. Принцип регулирования на основе отрицательной обратной связи находит применение в любой управляемой системе, будь то кибернетическая машина или живой организм.
Положение о том, что регулирование в живом организме, в том числе в центральной нервной системе человека, происходит на основе отрицательной обратной связи, иногда называют основной гипотезой кибернетики.
Общий для кибернетических машин и живых организмов принцип обратной связи неслучаен. Ведь и те и другие вынуждены действовать в постоянно меняющихся условиях, поэтому реакции, вырабатываемые у них, должны отличаться разнообразием. Но для этого необходимо, чтобы из рабочего органа в центральную систему поступали соответствующие сигналы. Обратная связь лежит в основе восстановления и перестройки функций центральной нервной системы.
НЕЙРОНЫ
Прежде чем говорить о возможностях моделирования мозга как управляющего центра разумных действий, нужно представить себе элементы сложнейшей нервной системы — нейроны — и попытаться создать их модель.
Значительная или даже, пожалуй, основная часть нынешних исследовательских работ по бионике посвящена созданию аналогов биологического нейрона — нервной клетки — основного элемента нервной системы. Конечная цель этих работ — создание систем, предназначенных для накопления, обработки и передачи большого количества информации, электронных машин, способных решать любые сложные задачи без предварительного программирования, различных самообучающихся, адаптивных (самоприспосабливающихся, самоорганизующихся устройств), обладающих малыми габаритами и высокой надёжностью машин. Иными словами, речь идёт о создании широкого комплекса автоматических систем, работающих по тем же принципам.
Что такое нейрон? Это нервная клетка человеческого мозга (рис. 66). В мозге человека их около 15 миллиардов, и мы о них очень мало знаем. Нейрон был и остаётся величайшей загадкой. Каждый нейрон снабжён выходным каналом — аксоном. По нему передаётся возбуждение к какому — либо органу. Например, тело нервной клетки находится в спинном мозге, а её аксон достигает мышц пальцев ноги. Если бы мы захотели сделать в масштабе большую модель аксона, хотя бы в виде шланга диаметром 4 см, то его длина оказалась бы более 16 км. Другие отростки нейрона — дендриты — являются входами в тело нервной клетки.
Значительная или даже, пожалуй, основная часть нынешних исследовательских работ по бионике посвящена созданию аналогов биологического нейрона — нервной клетки — основного элемента нервной системы. Конечная цель этих работ — создание систем, предназначенных для накопления, обработки и передачи большого количества информации, электронных машин, способных решать любые сложные задачи без предварительного программирования, различных самообучающихся, адаптивных (самоприспосабливающихся, самоорганизующихся устройств), обладающих малыми габаритами и высокой надёжностью машин. Иными словами, речь идёт о создании широкого комплекса автоматических систем, работающих по тем же принципам.
Что такое нейрон? Это нервная клетка человеческого мозга (рис. 66). В мозге человека их около 15 миллиардов, и мы о них очень мало знаем. Нейрон был и остаётся величайшей загадкой. Каждый нейрон снабжён выходным каналом — аксоном. По нему передаётся возбуждение к какому — либо органу. Например, тело нервной клетки находится в спинном мозге, а её аксон достигает мышц пальцев ноги. Если бы мы захотели сделать в масштабе большую модель аксона, хотя бы в виде шланга диаметром 4 см, то его длина оказалась бы более 16 км. Другие отростки нейрона — дендриты — являются входами в тело нервной клетки.