Страница:
«Жучка» — устройство, хорошо понимающее краткий командный язык из двух — трёх десятков слов. Обычно оно настроено на голос одного оператора. Как мы уже отметили, такой прибор способен управлять автомобилем или самолётом. Одна американская фирма успешно применила его в отделе технического контроля для записи параметров только что изготовленных цветных кинескопов. Другая фирма заставила «Жучку» запоминать свободные места в большом складском помещении и отправлять туда прибывающие контейнеры. Прибор незаменим при сложных научных экспериментах, когда надо записывать результаты, а руки исследователя заняты на пульте управления.
«Эксперт» — анализатор для выделения голоса одного из нескольких говорящих. Может помочь при опознании преступника, стать настройщиком музыкальных инструментов или контролёром качества звучания радиоприёмников, телевизоров и магнитофонов.
«Собеседник» — его действия могут быть самыми разнообразными: совет по телефону, когда врач сомневается в установлении диагноза, устный ответ программисту о результатах вычислений на ЭВМ, ответ на запрос о состоянии текущего счета в банке и т.п. Другая модификация — «Электронный секретарь», соединённый с пишущей машинкой.
«Переводчик» — название устройства не требует комментариев. Это искусственное ухо, подключённое к ЭВМ с программой автоматического перевода с одного языка на другой.
«Интегральный робот» — автомат, двигающийся впереди человека в опасных ситуациях. Подчиняется голосовым командам и докладывает пославшим его людям о том, что воспринимает. Мог бы помочь во время ремонта атомного реактора или путешествия на малоизученную планету.
Человеческое ухо существует в одном варианте. Искусственных, как видим, намечается несколько. Тем лучше! В том — то и сила техники, что она не копирует слепо природу.
МОДЕЛИРОВАНИЕ СИСТЕМ СЛУХА
Тайна пляшущих человечков.
ВАС СЛУШАЕТ РОБОТ
6. МОДЕЛИРОВАНИЕ ЗРЕНИЯ
«Эксперт» — анализатор для выделения голоса одного из нескольких говорящих. Может помочь при опознании преступника, стать настройщиком музыкальных инструментов или контролёром качества звучания радиоприёмников, телевизоров и магнитофонов.
«Собеседник» — его действия могут быть самыми разнообразными: совет по телефону, когда врач сомневается в установлении диагноза, устный ответ программисту о результатах вычислений на ЭВМ, ответ на запрос о состоянии текущего счета в банке и т.п. Другая модификация — «Электронный секретарь», соединённый с пишущей машинкой.
«Переводчик» — название устройства не требует комментариев. Это искусственное ухо, подключённое к ЭВМ с программой автоматического перевода с одного языка на другой.
«Интегральный робот» — автомат, двигающийся впереди человека в опасных ситуациях. Подчиняется голосовым командам и докладывает пославшим его людям о том, что воспринимает. Мог бы помочь во время ремонта атомного реактора или путешествия на малоизученную планету.
Человеческое ухо существует в одном варианте. Искусственных, как видим, намечается несколько. Тем лучше! В том — то и сила техники, что она не копирует слепо природу.
МОДЕЛИРОВАНИЕ СИСТЕМ СЛУХА
Прежде чем приступить к конструированию устройства слуха роботов, смоделируем отдельные элементы этих систем.
На рис. 34 — 37 показаны схемы усилителей звуковой частоты.
Начинать конструирование моделей слуховых систем лучше всего с простейшего акустического реле (рис. 37). Микрофон ВМ1 служит датчиком. Он преобразует звуковой сигнал в электрические колебания, а усилитель звуковой частоты усиливает их. После выпрямления диодом VD1 импульсы постоянного тока вызывают срабатывание электромагнитного реле.
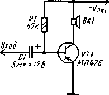 Рис. 34. Оконечный усилителъ звуковой частоты
Рис. 34. Оконечный усилителъ звуковой частоты
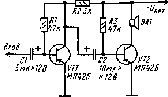 Рис. 35. Двухтранзисторный усилителъ звуковой частоты
Рис. 35. Двухтранзисторный усилителъ звуковой частоты
Принципиальная схема такого варианта акустического реле изображена на рис. 38. На транзисторах VT1 и VT2 собран усилитель звуковой частоты (34), а диоды VD1 и VD2 и конденсатор С4 образуют выпрямитель. Транзистор VT3, резистор R6 и электромагнитное реле К1 с диодом VD1, шунтирующим обмотку реле, составляют электронное реле, а лампа HL1 с резистором R7 — исполнительную цепь.
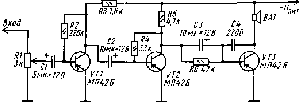 Рис. 36. Трехтранзисторный усилитель звуковой частоты высокого качества
Рис. 36. Трехтранзисторный усилитель звуковой частоты высокого качества
Автомат работает так. Пока в помещении, где установлен микрофон, сравнительно тихо, в коллекторной цепи транзистора VT3 течёт небольшой ток покоя (меньше тока отпускания якоря реле К1), устанавливаемый при налаживании автомата. В это время контакты К 1.1 реле К1 разомкнуты и, следовательно, исполнительная цепь выключена. При появлении звукового сигнала (громкий разговор, шум и т. п.) колебания звуковой частоты от микрофонов усиливают транзисторы VT1 и VT2 и с нагрузочного резистора R5 сигнал поступает на выпрямитель. Отрицательные полуволны выпрямленного напряжения заряжают конденсатор С4 и поступают на базу транзистора VT3. Если конденсатор зарядится до напряжения 0,25…0,3 В, то коллекторный ток транзистора увеличится настолько, что реле К1 сработает и включит исполнительную цепь. Когда разговор перед микрофоном прекратится, конденсатор С4 почти полностью разрядится, коллекторный ток транзистора VT3 уменьшится до исходного, реле К1 отключится, а его контакты К 1.1, разомкнувшись, обесточат исполнительную цепь.
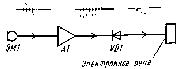 Рис. 37. Структурная схема акустического реле
Рис. 37. Структурная схема акустического реле
 Рис. 38. Принципиальная схема акустического реле
Рис. 38. Принципиальная схема акустического реле
Какова роль резистора R1? Им регулируют уровень сигнала, поступающего от микрофона на вход усилителя 34, и тем самым регулируют чувствительность акустического реле.
Электромагнитное реле — РЭСЮ (РС4.524.302) или РЭС9 (РС4.524.200) с током срабатывания не более 30…40 мА. Напряжение источника питания и п ит должно быть на 20…30% больше напряжения срабатывания используемого электромагнитного реле. Транзисторы — любые маломощные низкочастотные структуры р — и — р (из серий МП39 — МП42) со статическим коэффициентом усиления передачи тока не менее 20. Если напряжение источника питания более 15 В, но не более 30 В, то транзистор VT3 должен быть МП40А или МП25, МП21.
Сопротивление резисторов R3 и R5, являющихся нагрузками транзисторов VT1 и VT2 усилителя, могут быть 4,7…8,2 кОм. Сопротивление резистора R7 зависит от параметров используемой лампы HL1.
Транзистор VT1, резисторы R2, R3 и конденсатор С2 сначала не монтируйте, чтобы испытать работу автомата с одноступенным усилителем, но обязательно оставьте для них место. Конденсатор С1 соедините отрицательной обкладкой непосредственно с базой транзистора VT2.
Сначала, включив в коллекторную цепь транзистора VT3 миллиамперметр, подборкой резистора R6 установите в этой цепи ток не более 2…4 мА. Он должен быть меньше тока отпускания реле. Затем временно подключите параллельно резистору R6 ещё один резистор сопротивлением 15…20кОм. При этом коллекторный ток должен резко увеличиться, а реле сработать. Удалите второй резистор — коллекторный ток уменьшится до исходного, а реле отпустит якорь. Так вы проверите, работает ли электронное реле автомата.
Режим работы транзистора усилителя VT2 установите подборкой резистора R4. Ток покоя коллекторной цепи транзистора может быть в пределах 1…1,5мА.
А теперь подключите к входному резистору R1 микрофон, например МД — 47 или абонентский (радиотрансляционный) динамический громкоговоритель, который будет играть роль микрофона. Движок резистора установите в верхнее положение. Следя за показаниями миллиамперметра в коллекторной цепи транзистора VT3, громко произнесите перед микрофоном (или перед диффузором громкоговорителя) протяжный звук «а — а — а». Коллекторный ток транзистора должен при этом увеличиться, а реле сработать и включить исполнительную цепь.
Используя два микрофона, два усилителя и двухоб — моточное поляризованное реле, можно сделать слуховое устройство (рис. 39), поворачивающее голову робота в сторону источника звука.
Звуковое управление можно осуществлять свистком, свирелью или голосом. Наиболее чётко слуховые устройства работают при использовании в качестве источника сигналов электронного генератора звуковых команд. Он размещается в пульте управления роботом. Но это не обязательно.
 Рис. 39. Устройство слуха, поворачивающее голову робота в сторону источника звука
Рис. 39. Устройство слуха, поворачивающее голову робота в сторону источника звука
Управление звуком. Акустическим каналом связи пользуются в основном птицы, животные и человек. Речевой и слуховой аппараты человека настолько хорошо приспособились к звуковым сообщениям, что лучшего желать трудно. Для решения технических задач акустический канал малопригоден из-за относительно низкой скорости звука в воздухе и значительного затухания при распространении.
В наш век космических скоростей применение акустического канала в технике связи — это только история. Проводная связь и радиосвязь его полностью вытеснили. А вот использование акустических каналов для дистанционного управления подвижными моделями имеет многие преимущества не только по сравнению с проводными линиями, но и с радио.
Конечно, управление моделью по радио очень эффектно, и трудно его сравнить с каким-либо другим видом телеуправления. Но здесь есть и свои трудности. Например, прежде, чем делать передающую аппаратуру радиоуправления моделью, даже самой простой, нужно иметь соответствующее органов Государственной инспекции электросвязи разрешение на работу с передатчиком, выдаваемое по ходатайству областных (краевых) радиотехнических школ. Основные положения действующей «Инструкции о порядке регистрации и эксплуатации любительских приемопередающих радиостанций индивидуального и коллективного пользования» изложены в журнале «Радио» № 5 за 1968 год (с. 61 — 62).
Однако же и без радио может получиться неплохо. Заиграл на дудочке (да — да, на самой обыкновенной дудочке для малышей) — тронулась модель. Заиграл ещё раз — повернула вправо, в третий раз — влево…
Радиус действия аппаратуры при работе от дудочки достигает 10… 15 м. Описываемая система управления звуком была применена в модели «Кобра, танцующая под музыку». Кобра, повинуясь звукам дудочки, то поднимается вверх, то опускается или раскачивается. Схема электронного блока кобры показана на рис. 40. Эту систему можно использовать и для управления моделями автомобилей и кораблей. Её радиус действия может быть легко увеличен, если дудочку заменить генератором звуковой частоты, к выходу которого подключить малогабаритную динамическую головку. Такой источник звука будет излучать весьма громкие сигналы, что может значительно увеличить радиус действия аппаратуры. Кроме того, генератор звуковых частот излучает более стабильные по частоте колебания, чем дудочка, что повышает надёжность работы аппаратуры в целом.
Число команд управления без существенных изменений схемы может быть увеличено до 6 — 9. Для этого потребуется лишь увеличить число фильтров звуковых частот в приёмной части системы.
Такое устройство можно взять за основу системы звукового управления роботом или его ЭВМ. Система звукового управления роботом должна включать в себя небольшой переносный электронный генератор звуковых команд и установленное в модели робота приёмное устройство.
На рис. 41 показана схема генератора звуковых команд.
Генератор звуковых команд состоит из трёх мультивибраторов, генерирующих частоты 280, 560 и 1100 Гц, двухтактного усилителя сигналов мультивибраторов и динамической головки. Выходы мультивибраторов подключают к усилителю сигналов через контакты трёх кнопок. На рис. 42 представлена схема приёмного устройства звуковых команд. Оно состоит из входного микрофонного усилителя и трёх избирательных электронных реле, настроенных на соответствующие частоты мультивибраторов генератора.
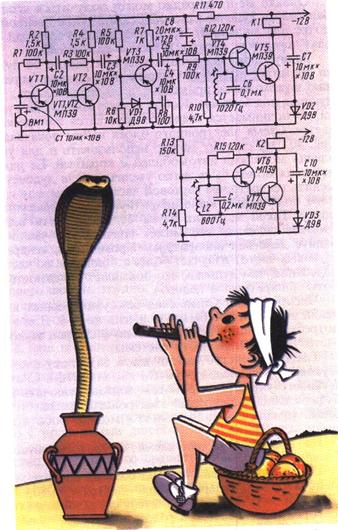 Рис. 40 Схема «Кобры танцующей под музыку»
Рис. 40 Схема «Кобры танцующей под музыку»
Вот фактически и весь канал телеуправления — от генераторов звуковых команд до выходных реле приёмного устройства. К ним подключают дешифратор — электромагнитный шаговый искатель. Посмотрим, как он используется для операции сложения. Допустим, на командную кнопку SB1 (см. рис. 41) нажали три раза — движок искателя переместился на три шага. Если вслед за этим набрать цифру 7, то движок переместится на десятый контакт, если 8 — то на одиннадцатый, и т. д. Подавая через контакты шагового искателя напряжение, включающее светящиеся цифры от 1 до 10 или 20, мы «научим» модель робота, например, решать простейшие задачи на сложение.
 Рис. 41 Генератор звуковых команд
Рис. 41 Генератор звуковых команд
Задачу на вычитание робот может решить, только если шаговый искатель имеет обратный ход. На частоте 280 Гц набирают уменьшаемое число, а на частоте 560 Гц — вычитаемое. Движок искателя укажет разность. Приводя в действие третий мультивибратор, искатель переводят в исходное положение.
Если выходные контакты искателя связать с исполнительными механизмами робота, то с помощью звукового генератора можно управлять не только его «математическими способностями», но и всем механизмом. При необходимости схему можно упростить, оставив в генераторе только один мультивибратор из трёх, а частоты получить коммутацией конденсаторов и резисторов. В зависимости от расстояния между передатчиком и приёмником мощность динамической головки может быть выбрана в пределах 0,1…0,5 Вт.
Настраивать резонансные контуры приёмника на выбранные значения частоты командных мультивибраторов лучше всего с помощью звукового генератора и осциллографа. Но в крайнем случае можно обойтись миллиамперметром на ток полного отклонения стрелки 30…50мА, включённым в цепь выходного реле канала. Настройку ведут по максимуму показаний прибора, когда на вход приёмника подают сигналы с мультивибраторов.
Слуховое устройство «Кобра, танцующая под музыку» по схеме аналогично приёмному устройству робота (см. рис. 42).
 Рис. 42. Приёмник звуковых команд
Рис. 42. Приёмник звуковых команд
Чудеса активных RC — фильтров. Электрические фильтры являются одними из основных элементов различных радиоэлектронных систем. Это обусловлено тем, что во многих областях науки и техники (радиотехника, акустика, различные отрасли машиностроения, медицина, системы телеметрии и телеуправления) необходимы выделение, подавление, фильтрация сигналов.
До сих пор мы говорили о системах LC — фильтров, в которых резонансные свойства определяются значениями индуктивности L и ёмкости С. Но LC — фильтры, особенно в диапазоне звуковых частот, очень громоздки, и в современных конструкциях их заменяют активными RC — фильтрами.
Активные RC — филътры пригодны для использования в самых различных устройствах. Например, они хорошо работают на весьма низкой (около 1 Гц) частоте среза и имеют добротность выше 100. Активные фильтры можно успешно применять в устройствах, которые сочетают функции модуляции, выпрямления и фильтрации, и в других, где нельзя использовать катушки индуктивности. Слуховые системы с активными RC — фильтрами используют для обнаружения шума на очень большом расстоянии. Их широко применяют при исследовании биотоков мозга и снятии энцефалограмм. С их помощью решают задачи распознавания речевых сигналов в моделях органов слуха и т.п.
Однако теоретические достоинства активных RC — фильтров — это одно, а использование их на практике — другое. Изготовление надёжных активных RC — фильтров оказалось делом гораздо более сложным, чем на первых порах представлялось разработчикам.
Прежде всего для таких фильтров необходим набор деталей с малым разбросом параметров (особенно конденсаторов и резисторов). Важно также исключить временной дрейф транзисторов и пассивных элементов, входящих в устройство.
Активный RC — фильтр, схема которого изображена на рис. 43, можно успешно использовать при конструировании светодинамических установок (СДУ). Как показала практика, этот фильтр в отличие от многих, рекомендуемых для фильтрации частоты в СДУ, является весьма практичным. В нём сравнительно немного транзисторов и деталей; он обеспечивает хорошую фильтрацию даже при значительном разбросе параметров деталей (см. таблицу).

Рис. 43. Схема активного RC — фильтра
Параметры деталей схемы RC — фильтра (рис. 43)
Таблица
—
Полоса Ёмкость С1 Сопротивление
пропускания, Гц конденсаторов, МКФ резисторов, кОм
С1 С2 СЗ С4 R3 R6
—
50.. .100 0,2 0,1 1 0,051 10 5,6
100.. .200 0,11 0,05 0,5 0,03 8,2 8,2
200... 400 0,051 0,015 0,2 0,015 9,1 8,2
400... 800 0,03 0,01 0,1 0,0068 8,2 8,2
800.. .1600 0,0115 0,0068 0,05 0,0033 5,6 6,8
1600... 3200 0,0084 0,001 0,025 0,0015 6,8 7,5
—
На рис. 34 — 37 показаны схемы усилителей звуковой частоты.
Начинать конструирование моделей слуховых систем лучше всего с простейшего акустического реле (рис. 37). Микрофон ВМ1 служит датчиком. Он преобразует звуковой сигнал в электрические колебания, а усилитель звуковой частоты усиливает их. После выпрямления диодом VD1 импульсы постоянного тока вызывают срабатывание электромагнитного реле.
Принципиальная схема такого варианта акустического реле изображена на рис. 38. На транзисторах VT1 и VT2 собран усилитель звуковой частоты (34), а диоды VD1 и VD2 и конденсатор С4 образуют выпрямитель. Транзистор VT3, резистор R6 и электромагнитное реле К1 с диодом VD1, шунтирующим обмотку реле, составляют электронное реле, а лампа HL1 с резистором R7 — исполнительную цепь.
Автомат работает так. Пока в помещении, где установлен микрофон, сравнительно тихо, в коллекторной цепи транзистора VT3 течёт небольшой ток покоя (меньше тока отпускания якоря реле К1), устанавливаемый при налаживании автомата. В это время контакты К 1.1 реле К1 разомкнуты и, следовательно, исполнительная цепь выключена. При появлении звукового сигнала (громкий разговор, шум и т. п.) колебания звуковой частоты от микрофонов усиливают транзисторы VT1 и VT2 и с нагрузочного резистора R5 сигнал поступает на выпрямитель. Отрицательные полуволны выпрямленного напряжения заряжают конденсатор С4 и поступают на базу транзистора VT3. Если конденсатор зарядится до напряжения 0,25…0,3 В, то коллекторный ток транзистора увеличится настолько, что реле К1 сработает и включит исполнительную цепь. Когда разговор перед микрофоном прекратится, конденсатор С4 почти полностью разрядится, коллекторный ток транзистора VT3 уменьшится до исходного, реле К1 отключится, а его контакты К 1.1, разомкнувшись, обесточат исполнительную цепь.
Какова роль резистора R1? Им регулируют уровень сигнала, поступающего от микрофона на вход усилителя 34, и тем самым регулируют чувствительность акустического реле.
Электромагнитное реле — РЭСЮ (РС4.524.302) или РЭС9 (РС4.524.200) с током срабатывания не более 30…40 мА. Напряжение источника питания и п ит должно быть на 20…30% больше напряжения срабатывания используемого электромагнитного реле. Транзисторы — любые маломощные низкочастотные структуры р — и — р (из серий МП39 — МП42) со статическим коэффициентом усиления передачи тока не менее 20. Если напряжение источника питания более 15 В, но не более 30 В, то транзистор VT3 должен быть МП40А или МП25, МП21.
Сопротивление резисторов R3 и R5, являющихся нагрузками транзисторов VT1 и VT2 усилителя, могут быть 4,7…8,2 кОм. Сопротивление резистора R7 зависит от параметров используемой лампы HL1.
Транзистор VT1, резисторы R2, R3 и конденсатор С2 сначала не монтируйте, чтобы испытать работу автомата с одноступенным усилителем, но обязательно оставьте для них место. Конденсатор С1 соедините отрицательной обкладкой непосредственно с базой транзистора VT2.
Сначала, включив в коллекторную цепь транзистора VT3 миллиамперметр, подборкой резистора R6 установите в этой цепи ток не более 2…4 мА. Он должен быть меньше тока отпускания реле. Затем временно подключите параллельно резистору R6 ещё один резистор сопротивлением 15…20кОм. При этом коллекторный ток должен резко увеличиться, а реле сработать. Удалите второй резистор — коллекторный ток уменьшится до исходного, а реле отпустит якорь. Так вы проверите, работает ли электронное реле автомата.
Режим работы транзистора усилителя VT2 установите подборкой резистора R4. Ток покоя коллекторной цепи транзистора может быть в пределах 1…1,5мА.
А теперь подключите к входному резистору R1 микрофон, например МД — 47 или абонентский (радиотрансляционный) динамический громкоговоритель, который будет играть роль микрофона. Движок резистора установите в верхнее положение. Следя за показаниями миллиамперметра в коллекторной цепи транзистора VT3, громко произнесите перед микрофоном (или перед диффузором громкоговорителя) протяжный звук «а — а — а». Коллекторный ток транзистора должен при этом увеличиться, а реле сработать и включить исполнительную цепь.
Используя два микрофона, два усилителя и двухоб — моточное поляризованное реле, можно сделать слуховое устройство (рис. 39), поворачивающее голову робота в сторону источника звука.
Звуковое управление можно осуществлять свистком, свирелью или голосом. Наиболее чётко слуховые устройства работают при использовании в качестве источника сигналов электронного генератора звуковых команд. Он размещается в пульте управления роботом. Но это не обязательно.
Управление звуком. Акустическим каналом связи пользуются в основном птицы, животные и человек. Речевой и слуховой аппараты человека настолько хорошо приспособились к звуковым сообщениям, что лучшего желать трудно. Для решения технических задач акустический канал малопригоден из-за относительно низкой скорости звука в воздухе и значительного затухания при распространении.
В наш век космических скоростей применение акустического канала в технике связи — это только история. Проводная связь и радиосвязь его полностью вытеснили. А вот использование акустических каналов для дистанционного управления подвижными моделями имеет многие преимущества не только по сравнению с проводными линиями, но и с радио.
Конечно, управление моделью по радио очень эффектно, и трудно его сравнить с каким-либо другим видом телеуправления. Но здесь есть и свои трудности. Например, прежде, чем делать передающую аппаратуру радиоуправления моделью, даже самой простой, нужно иметь соответствующее органов Государственной инспекции электросвязи разрешение на работу с передатчиком, выдаваемое по ходатайству областных (краевых) радиотехнических школ. Основные положения действующей «Инструкции о порядке регистрации и эксплуатации любительских приемопередающих радиостанций индивидуального и коллективного пользования» изложены в журнале «Радио» № 5 за 1968 год (с. 61 — 62).
Однако же и без радио может получиться неплохо. Заиграл на дудочке (да — да, на самой обыкновенной дудочке для малышей) — тронулась модель. Заиграл ещё раз — повернула вправо, в третий раз — влево…
Радиус действия аппаратуры при работе от дудочки достигает 10… 15 м. Описываемая система управления звуком была применена в модели «Кобра, танцующая под музыку». Кобра, повинуясь звукам дудочки, то поднимается вверх, то опускается или раскачивается. Схема электронного блока кобры показана на рис. 40. Эту систему можно использовать и для управления моделями автомобилей и кораблей. Её радиус действия может быть легко увеличен, если дудочку заменить генератором звуковой частоты, к выходу которого подключить малогабаритную динамическую головку. Такой источник звука будет излучать весьма громкие сигналы, что может значительно увеличить радиус действия аппаратуры. Кроме того, генератор звуковых частот излучает более стабильные по частоте колебания, чем дудочка, что повышает надёжность работы аппаратуры в целом.
Число команд управления без существенных изменений схемы может быть увеличено до 6 — 9. Для этого потребуется лишь увеличить число фильтров звуковых частот в приёмной части системы.
Такое устройство можно взять за основу системы звукового управления роботом или его ЭВМ. Система звукового управления роботом должна включать в себя небольшой переносный электронный генератор звуковых команд и установленное в модели робота приёмное устройство.
На рис. 41 показана схема генератора звуковых команд.
Генератор звуковых команд состоит из трёх мультивибраторов, генерирующих частоты 280, 560 и 1100 Гц, двухтактного усилителя сигналов мультивибраторов и динамической головки. Выходы мультивибраторов подключают к усилителю сигналов через контакты трёх кнопок. На рис. 42 представлена схема приёмного устройства звуковых команд. Оно состоит из входного микрофонного усилителя и трёх избирательных электронных реле, настроенных на соответствующие частоты мультивибраторов генератора.
Вот фактически и весь канал телеуправления — от генераторов звуковых команд до выходных реле приёмного устройства. К ним подключают дешифратор — электромагнитный шаговый искатель. Посмотрим, как он используется для операции сложения. Допустим, на командную кнопку SB1 (см. рис. 41) нажали три раза — движок искателя переместился на три шага. Если вслед за этим набрать цифру 7, то движок переместится на десятый контакт, если 8 — то на одиннадцатый, и т. д. Подавая через контакты шагового искателя напряжение, включающее светящиеся цифры от 1 до 10 или 20, мы «научим» модель робота, например, решать простейшие задачи на сложение.
Задачу на вычитание робот может решить, только если шаговый искатель имеет обратный ход. На частоте 280 Гц набирают уменьшаемое число, а на частоте 560 Гц — вычитаемое. Движок искателя укажет разность. Приводя в действие третий мультивибратор, искатель переводят в исходное положение.
Если выходные контакты искателя связать с исполнительными механизмами робота, то с помощью звукового генератора можно управлять не только его «математическими способностями», но и всем механизмом. При необходимости схему можно упростить, оставив в генераторе только один мультивибратор из трёх, а частоты получить коммутацией конденсаторов и резисторов. В зависимости от расстояния между передатчиком и приёмником мощность динамической головки может быть выбрана в пределах 0,1…0,5 Вт.
Настраивать резонансные контуры приёмника на выбранные значения частоты командных мультивибраторов лучше всего с помощью звукового генератора и осциллографа. Но в крайнем случае можно обойтись миллиамперметром на ток полного отклонения стрелки 30…50мА, включённым в цепь выходного реле канала. Настройку ведут по максимуму показаний прибора, когда на вход приёмника подают сигналы с мультивибраторов.
Слуховое устройство «Кобра, танцующая под музыку» по схеме аналогично приёмному устройству робота (см. рис. 42).
Чудеса активных RC — фильтров. Электрические фильтры являются одними из основных элементов различных радиоэлектронных систем. Это обусловлено тем, что во многих областях науки и техники (радиотехника, акустика, различные отрасли машиностроения, медицина, системы телеметрии и телеуправления) необходимы выделение, подавление, фильтрация сигналов.
До сих пор мы говорили о системах LC — фильтров, в которых резонансные свойства определяются значениями индуктивности L и ёмкости С. Но LC — фильтры, особенно в диапазоне звуковых частот, очень громоздки, и в современных конструкциях их заменяют активными RC — фильтрами.
Активные RC — филътры пригодны для использования в самых различных устройствах. Например, они хорошо работают на весьма низкой (около 1 Гц) частоте среза и имеют добротность выше 100. Активные фильтры можно успешно применять в устройствах, которые сочетают функции модуляции, выпрямления и фильтрации, и в других, где нельзя использовать катушки индуктивности. Слуховые системы с активными RC — фильтрами используют для обнаружения шума на очень большом расстоянии. Их широко применяют при исследовании биотоков мозга и снятии энцефалограмм. С их помощью решают задачи распознавания речевых сигналов в моделях органов слуха и т.п.
Однако теоретические достоинства активных RC — фильтров — это одно, а использование их на практике — другое. Изготовление надёжных активных RC — фильтров оказалось делом гораздо более сложным, чем на первых порах представлялось разработчикам.
Прежде всего для таких фильтров необходим набор деталей с малым разбросом параметров (особенно конденсаторов и резисторов). Важно также исключить временной дрейф транзисторов и пассивных элементов, входящих в устройство.
Активный RC — фильтр, схема которого изображена на рис. 43, можно успешно использовать при конструировании светодинамических установок (СДУ). Как показала практика, этот фильтр в отличие от многих, рекомендуемых для фильтрации частоты в СДУ, является весьма практичным. В нём сравнительно немного транзисторов и деталей; он обеспечивает хорошую фильтрацию даже при значительном разбросе параметров деталей (см. таблицу).
Рис. 43. Схема активного RC — фильтра
Параметры деталей схемы RC — фильтра (рис. 43)
Таблица
—
Полоса Ёмкость С1 Сопротивление
пропускания, Гц конденсаторов, МКФ резисторов, кОм
С1 С2 СЗ С4 R3 R6
—
50.. .100 0,2 0,1 1 0,051 10 5,6
100.. .200 0,11 0,05 0,5 0,03 8,2 8,2
200... 400 0,051 0,015 0,2 0,015 9,1 8,2
400... 800 0,03 0,01 0,1 0,0068 8,2 8,2
800.. .1600 0,0115 0,0068 0,05 0,0033 5,6 6,8
1600... 3200 0,0084 0,001 0,025 0,0015 6,8 7,5
—
Тайна пляшущих человечков.
Мы познакомили читателя с различными электронными устройствами, с помощью которых моделируют системы слуха. С этим багажом можно уверенно двигаться вперёд — использовать модели в создании роботов, принцип работы которых основан на сложных процессах управления. Можно создать увлекательные модели, понимающие различные сигналы и даже умеющие танцевать под музыку. Представьте себе куклу и даже робота, отплясывающих весёлый танец под музыку. Такие чудесные модели ещё не созданы, но они вполне осуществимы.
Музыкальные звуки отличаются громкостью, ритмом, тембром и рядом других параметров. Для различных сочетаний этих признаков можно найти общие танцевальные движения, составить матричные таблицы и установить с их помощью закономерные связи звучаний музыки и движений в танце. Затем с помощью электронных устройств и RC — фильтров создать анализаторы, различающие не только тембр звучания, но и отдельные музыкальные ноты, и с помощью логических устройств научиться управлять движениями модели.
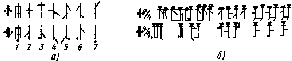 Рис. 44. Запись работы каменщика: а — пример записи некоторых движений, б — мотография записи работы каменщика
Рис. 44. Запись работы каменщика: а — пример записи некоторых движений, б — мотография записи работы каменщика
Возможно, что вам и матрицу составлять не придётся — это уже сделано в Советском Союзе энтузиастом, мурманским врачом А. П. Волышевым, который уже давно разработал систему для записи движений человека — мотографию. Элементы мотографической системы состоят из пяти ведущих знаков, трёх пар линеек и нескольких десятков дополнительных знаков, не превышающих числа нотных знаков в музыке. Пример записи некоторых движений показан на рис. 44, а.
В качестве иллюстрации использования мотогра — фии приводим пример записи работы каменщика (рис. 44, б). Следует отметить, что в записи работы каменщика учтено расположение кирпича слева от каменщика, а строительного раствора — справа. Каменщик держит мастерок в правой руке. На рисунке приведена запись переноса каменщиком раствора и кирпича к месту кладки.
Если вас заинтересует проблема автоматических танцев под музыку, то вначале придётся выполнить мотографическую запись выбранного танца, затем установить логические связи музыки и движений, после чего приступить к составлению логических схем танцев под музыку. Создание механической системы с электромагнитами или другими приводными устройствами будет самой лёгкой частью задачи.
Музыкальные звуки отличаются громкостью, ритмом, тембром и рядом других параметров. Для различных сочетаний этих признаков можно найти общие танцевальные движения, составить матричные таблицы и установить с их помощью закономерные связи звучаний музыки и движений в танце. Затем с помощью электронных устройств и RC — фильтров создать анализаторы, различающие не только тембр звучания, но и отдельные музыкальные ноты, и с помощью логических устройств научиться управлять движениями модели.
Возможно, что вам и матрицу составлять не придётся — это уже сделано в Советском Союзе энтузиастом, мурманским врачом А. П. Волышевым, который уже давно разработал систему для записи движений человека — мотографию. Элементы мотографической системы состоят из пяти ведущих знаков, трёх пар линеек и нескольких десятков дополнительных знаков, не превышающих числа нотных знаков в музыке. Пример записи некоторых движений показан на рис. 44, а.
В качестве иллюстрации использования мотогра — фии приводим пример записи работы каменщика (рис. 44, б). Следует отметить, что в записи работы каменщика учтено расположение кирпича слева от каменщика, а строительного раствора — справа. Каменщик держит мастерок в правой руке. На рисунке приведена запись переноса каменщиком раствора и кирпича к месту кладки.
Если вас заинтересует проблема автоматических танцев под музыку, то вначале придётся выполнить мотографическую запись выбранного танца, затем установить логические связи музыки и движений, после чего приступить к составлению логических схем танцев под музыку. Создание механической системы с электромагнитами или другими приводными устройствами будет самой лёгкой частью задачи.
ВАС СЛУШАЕТ РОБОТ
Представьте, что вы звоните по телефону приятелю и вслед за первым гудком в трубке слышите лёгкий щелчок и его голос: «Меня нет дома. Вернусь к восьми. Что вы мне хотите сказать?». Не пытайтесь уличить приятеля во лжи. Он не разыгрывает вас. И хотя слышен его голос, приятеля действительно нет дома. Вам ответил телефонный «секретарь». Когда его хозяин вернётся домой, магнитофон расскажет ему о вашем звонке и о том, что вы передали.
Как построен робот — автоответчик, поясняет рис. 45. Звук вызова (звонок) телефонного аппарата воспринимает микрофон ВМ1, преобразует в электрический сигнал, который приводит в действие сначала акустическое реле, а затем реле времени. Реле К2, Срабатывая, замыкает контакты К2.1 и подаёт питание на магнитофон, усилитель блока ответа и электромагнит ЭМ, приводящий в действие механизм подъёма телефонной трубки.
Блок ответа состоит из магнитной головки BS1 (воспроизводящей), установленной на магнитофоне, и транзисторного усилителя. Громкоговоритель ВА1 воспроизводит информационную запись, предварительно выполненную на одной из дорожек магнитной ленты. Индукционный датчик ИД с телефонного аппарата снимает сигнал сообщения и записывает его на другую дорожку магнитной ленты. По истечении времени выдержки реле К2 размыкает контакты и автоответчик переходит в исходное состояние.
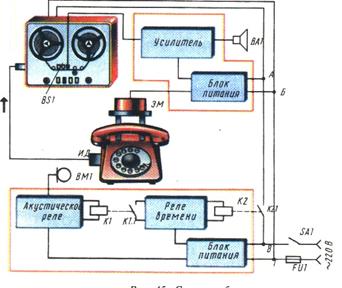 Рис. 45 Схема робота-автоответчика
Рис. 45 Схема робота-автоответчика
Как построен робот — автоответчик, поясняет рис. 45. Звук вызова (звонок) телефонного аппарата воспринимает микрофон ВМ1, преобразует в электрический сигнал, который приводит в действие сначала акустическое реле, а затем реле времени. Реле К2, Срабатывая, замыкает контакты К2.1 и подаёт питание на магнитофон, усилитель блока ответа и электромагнит ЭМ, приводящий в действие механизм подъёма телефонной трубки.
Блок ответа состоит из магнитной головки BS1 (воспроизводящей), установленной на магнитофоне, и транзисторного усилителя. Громкоговоритель ВА1 воспроизводит информационную запись, предварительно выполненную на одной из дорожек магнитной ленты. Индукционный датчик ИД с телефонного аппарата снимает сигнал сообщения и записывает его на другую дорожку магнитной ленты. По истечении времени выдержки реле К2 размыкает контакты и автоответчик переходит в исходное состояние.
6. МОДЕЛИРОВАНИЕ ЗРЕНИЯ
Специалисты в области бионики ведут работы по моделированию некоторых функций человеческого глаза. Создана электронная модель сетчатки, воспроизводящая работу фоторецепторов в центральной ямке и на периферии, предложено устройство, аналогичное механизму управления движением глазного яблока. Уже есть попытки построить электронную модель цветового восприятия. Первые «видящие» роботы — это различные опознающие устройства, применяемые в медицине и криминалистике.
Принципиально то, что робот может «видеть» гораздо лучше человека. Ведь человеческому глазу доступна лишь оптическая часть спектра электромагнитных волн. А электронное устройство свободно от биологических ограничений. Его можно, например, сделать чувствительным к инфракрасным и ультрафиолетовым лучам. К электронному глазу можно подключить радар. Он способен видеть в темноте и при сверхярком свете, работать в комплексе с телескопом или микроскопом, фиксировать сверхбыстрые и сверхмедленные процессы.
Современные фотореле реагируют на невидимые глазом участки спектра (инфракрасное и ультрафиолетовое излучение), способны регистрировать изменения параметров света, происходящие с частотой до миллиона колебаний в секунду (предельная частота, воспринимаемая человеческим глазом, 20 Гц).
Как уже говорилось, электронными элементами зрения в технике являются фотоэлементы — устройства, которые при освещении меняют свои электрические характеристики (одни из них под действием света начинают пропускать электрический ток, другие сами становятся источниками тока). Основное различие между человеческим глазом и фотоэлементом состоит в том, что глаз в сочетании с мозгом создаёт детальное изображение увиденного, фотоэлемент же всего лишь различным образом реагирует на факт наличия света.
На рис. 46 показана увеличенная структура сетчатки глаза, состоящей из палочек и колбочек. Любая чувствительная к свету клетка сетчатки соединена непосредственно со зрительным нервом, а также с другими клетками, которые, в свою очередь, соединены между собой. Таким образом, световой сигнал уже на этом этапе «продумывается». Сам глаз человека выполняет часть функций осмысливания, свойственных головному мозгу.
Подобно сетчатке глаза устроен экран электроннолучевых передающих трубок, состоящий из множества микроскопических элементов диаметром около 1 мкм (рис. 47). Ток каждого микрофотоэлемента трубки коммутируется электронным лучом, построчно пробегающим по всем микрофотоэлементам экрана.
Чтобы научить робота видеть, нет нужды приделывать ему голову с глазами. Как ни странно, у роботов — манипуляторов глаза, как правило, находятся в руке… Вот вам пример. Представьте себе, что вместо рабочего у печи стоит робот — механическая рука. В управляющей вычислительной машине заложена программа его действий. Нужно только отдать команду приступить к работе (рис. 48).
 Рис. 46 Структура сетчатки г газа
Рис. 46 Структура сетчатки г газа
 Рис. 47 Экран передающей те ревизионной трубки
Рис. 47 Экран передающей те ревизионной трубки
 Рис. 48. Манипулятор за работой
Рис. 48. Манипулятор за работой
Робот зашевелился, протянул клешню в печь, нащупал раскалённую деталь, взял её точно посередине, осторожно вынул, перенёс, минуя окружающие предметы, к ванне и опустил в масло. Вернулся за второй деталью, взял её точно так же, потом за третьей, четвёртой… И так без устали, без передышки.
Для этого у него есть все возможности. В его клешне расположены фотоглаза, которыми робот «видит» деталь и на расстоянии, и в непосредственной близости.
На рис. 49 показана структурная схема электронного блока робота, занимающегося построением «домиков» из кубиков под зрительным контролем. Телевизионная камера наблюдает за работой руки (глаз системы). Электронно — вычислительное устройство управляет механической рукой на основе анализа телевизионных сигналов и информации о положении руки. Эта, казалось бы, очень простая задача требует создания сложнейших программ для ЭВМ. Следует сказать, что на пути к созданию машин, способных приспосабливаться к окружающей обстановке, самое трудное препятствие — проблема искусственного зрения. Это огромное поле деятельности для любого человека, интересующегося системами электронного зрения и их практическим воплощением. А вот как всё начиналось.
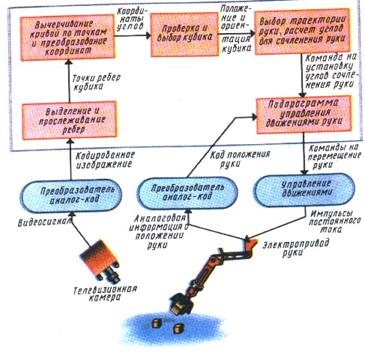 Рис. 49 Схема интегрального робота
Рис. 49 Схема интегрального робота
 Рис. 50 Селеновый фотоэлемент
Рис. 50 Селеновый фотоэлемент
В 1917 году шведский химик Йене Берцелиус открыл новый химический элемент — селен. Было замечено, что в обычных условиях он проводит электрический ток очень плохо. Если включить в цепь (рис. 50) батареи и миллиамперметра пластину селена, то, пока свет не попадёт на неё, ток в цепи будет очень слабым, так как удельное сопротивление селена велико. Но стоит лишь осветить селеновую пластину, как сопротивление её резко уменьшается, а ток возрастает. Чем больше будет освещённость пластины, тем меньше её сопротивление и тем сильнее ток в цепи.
Научное объяснение фотосопротивления было дано много лет спустя после его открытия. Сделал это наш выдающийся соотечественник Александр Григорьевич Столетов.
В наше время любой юный техник без особого труда может сделать фототранзистор. Принцип действия фототранзистора основан на чувствительности к свету полупроводникового р — и перехода. Кванты света, падая на переход, высвобождают в нём электроны. Чем больше световой энергии попадает на полупроводник, тем больше высвобождается электронов. В результате появляется дополнительный электрический ток через эмиттерный переход, управляющий сопротивлением транзистора. Для изготовления фоторезистора необходим исправный транзистор МП40 или МП42 со статическим коэффициентом передачи тока h 2 i3 = 40… 100 и начальным током коллектора не более 20 мкА. Лобзиком осторожно спиливают крышку транзистора и тщательно удаляют с кристалла попавшие на него металлические опилки. Если эти операции выполнены аккуратно, транзистор не изменит параметров. Убедившись в этом, вы можете считать, что справились с изготовлением фоторезистора.
Принципиально то, что робот может «видеть» гораздо лучше человека. Ведь человеческому глазу доступна лишь оптическая часть спектра электромагнитных волн. А электронное устройство свободно от биологических ограничений. Его можно, например, сделать чувствительным к инфракрасным и ультрафиолетовым лучам. К электронному глазу можно подключить радар. Он способен видеть в темноте и при сверхярком свете, работать в комплексе с телескопом или микроскопом, фиксировать сверхбыстрые и сверхмедленные процессы.
Современные фотореле реагируют на невидимые глазом участки спектра (инфракрасное и ультрафиолетовое излучение), способны регистрировать изменения параметров света, происходящие с частотой до миллиона колебаний в секунду (предельная частота, воспринимаемая человеческим глазом, 20 Гц).
Как уже говорилось, электронными элементами зрения в технике являются фотоэлементы — устройства, которые при освещении меняют свои электрические характеристики (одни из них под действием света начинают пропускать электрический ток, другие сами становятся источниками тока). Основное различие между человеческим глазом и фотоэлементом состоит в том, что глаз в сочетании с мозгом создаёт детальное изображение увиденного, фотоэлемент же всего лишь различным образом реагирует на факт наличия света.
На рис. 46 показана увеличенная структура сетчатки глаза, состоящей из палочек и колбочек. Любая чувствительная к свету клетка сетчатки соединена непосредственно со зрительным нервом, а также с другими клетками, которые, в свою очередь, соединены между собой. Таким образом, световой сигнал уже на этом этапе «продумывается». Сам глаз человека выполняет часть функций осмысливания, свойственных головному мозгу.
Подобно сетчатке глаза устроен экран электроннолучевых передающих трубок, состоящий из множества микроскопических элементов диаметром около 1 мкм (рис. 47). Ток каждого микрофотоэлемента трубки коммутируется электронным лучом, построчно пробегающим по всем микрофотоэлементам экрана.
Чтобы научить робота видеть, нет нужды приделывать ему голову с глазами. Как ни странно, у роботов — манипуляторов глаза, как правило, находятся в руке… Вот вам пример. Представьте себе, что вместо рабочего у печи стоит робот — механическая рука. В управляющей вычислительной машине заложена программа его действий. Нужно только отдать команду приступить к работе (рис. 48).
Робот зашевелился, протянул клешню в печь, нащупал раскалённую деталь, взял её точно посередине, осторожно вынул, перенёс, минуя окружающие предметы, к ванне и опустил в масло. Вернулся за второй деталью, взял её точно так же, потом за третьей, четвёртой… И так без устали, без передышки.
Для этого у него есть все возможности. В его клешне расположены фотоглаза, которыми робот «видит» деталь и на расстоянии, и в непосредственной близости.
На рис. 49 показана структурная схема электронного блока робота, занимающегося построением «домиков» из кубиков под зрительным контролем. Телевизионная камера наблюдает за работой руки (глаз системы). Электронно — вычислительное устройство управляет механической рукой на основе анализа телевизионных сигналов и информации о положении руки. Эта, казалось бы, очень простая задача требует создания сложнейших программ для ЭВМ. Следует сказать, что на пути к созданию машин, способных приспосабливаться к окружающей обстановке, самое трудное препятствие — проблема искусственного зрения. Это огромное поле деятельности для любого человека, интересующегося системами электронного зрения и их практическим воплощением. А вот как всё начиналось.
В 1917 году шведский химик Йене Берцелиус открыл новый химический элемент — селен. Было замечено, что в обычных условиях он проводит электрический ток очень плохо. Если включить в цепь (рис. 50) батареи и миллиамперметра пластину селена, то, пока свет не попадёт на неё, ток в цепи будет очень слабым, так как удельное сопротивление селена велико. Но стоит лишь осветить селеновую пластину, как сопротивление её резко уменьшается, а ток возрастает. Чем больше будет освещённость пластины, тем меньше её сопротивление и тем сильнее ток в цепи.
Научное объяснение фотосопротивления было дано много лет спустя после его открытия. Сделал это наш выдающийся соотечественник Александр Григорьевич Столетов.
В наше время любой юный техник без особого труда может сделать фототранзистор. Принцип действия фототранзистора основан на чувствительности к свету полупроводникового р — и перехода. Кванты света, падая на переход, высвобождают в нём электроны. Чем больше световой энергии попадает на полупроводник, тем больше высвобождается электронов. В результате появляется дополнительный электрический ток через эмиттерный переход, управляющий сопротивлением транзистора. Для изготовления фоторезистора необходим исправный транзистор МП40 или МП42 со статическим коэффициентом передачи тока h 2 i3 = 40… 100 и начальным током коллектора не более 20 мкА. Лобзиком осторожно спиливают крышку транзистора и тщательно удаляют с кристалла попавшие на него металлические опилки. Если эти операции выполнены аккуратно, транзистор не изменит параметров. Убедившись в этом, вы можете считать, что справились с изготовлением фоторезистора.