Страница:
ЗАКОНЫ МЕХАНИКИ И РУКОПАШНЫЙ БОЙ
КТО ЖЕ ОН – НАСТОЯЩИЙ РУКОПАШНИК?
ГЛАВА 2
ЗАКОНЫ ФИЗИКИ И ДВИГАТЕЛЬНАЯ ДЕЯТЕЛЬНОСТЬ ЧЕЛОВЕКА
КИНЕМАТИКА ДВИЖЕНИЙ ЧЕЛОВЕКА
АНАТОМО-ФУНКЦИОНАЛЬНЫЕ ОСОБЕННОСТИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА
Костно-суставная система
Мышечно-сухожильная система
Рукопашный бой требует всесторонней подготовки бойца-рукопашника. Это значит, что наряду с интеллектуальной, психологической и физической подготовкой требуется и теоретическая подготовка рукопашника.
Сказанное отнюдь не означает того, что начинающий рукопашник должен сразу же засесть за изучение законов механики. Тем не менее, автор надеется, что это заставит его призадуматься.
Ведь многие рукопашники полагают, что они вовсе не нуждаются в каких-либо теоретических познаниях. Более того, некоторые из них, особенно это относится к одаренным природой мастерам, не любят теории и, как правило, не очень жалуют теоретиков. Слава Богу, автор не относит себя ни к числу первых, ни к числу вторых.
Прежде чем продолжить разговор, приведем, определение механики.
Механика – наука о движении объектов в пространстве и о силах, вызывающих это движение. Если речь идет о применении учения о движении и силах к решению практических задач, то говорят о прикладной механике (например, строительная механика, аэрогидромеханика, биомеханика и т.д.).
Как же приложить законы механики к практике рукопашного боя? Для начала отметим, что с точки зрения механики рукопашный бой представляет собой физическое явление, сущность которого проявляется в механическом взаимодействии объектов, находящихся в равновесии. По сути, целью рукопашного боя является выведение из равновесия одного из объектов.
Напомним: учет законов механики является одной из основных идеологических посылок вос-станавливаемой системы русского рукопашного боя.
И это произошло не потому, что автор окончил политехнический институт и имеет диплом инженера-механика; и вовсе не потому, что он некоторое время был начальником лаборатории кафедры механики военного училища. А потому (и только потому), что русский рукопашный бой издревле замешан на объективных законах механики. Наши предки испокон веков опирались на эти законы в жестоких рукопашных схватках с бесчисленными врагами. Конечно, это происходило неосознанно, на интуитивном уровне, да еще – на основе приобретавшегося в схватках горького опыта. Эта «наука» передавалась от поколения к поколению, от прадеда к деду, от деда к внуку.
Взглянув на рисунок, вы обратили внимание на то, как легко, с насмешливой улыбкой на лице, наш безоружный предок сбрасывает с коня вооруженного противника? Татарин с наглой самоуверенностью, замахнувшись нагайкой, выбрасывает левую руку, чтобы схватить крестьянина. Но тот ловит противника на встречном движении и – мы в этом не сомневаемся! – сбрасывает всадника наземь.
 Нет сомнений в том, что этот крестьянин, мужественно защищающий свою землю от пришельцев, и слыхом не слыхал о законах механики. Но в этой схватке он использует «Кинетическую энергию» удара противника, он создает «Опрокидывающий момент относительно точки опоры»... Словом, действует-то по законам механики!
Нет сомнений в том, что этот крестьянин, мужественно защищающий свою землю от пришельцев, и слыхом не слыхал о законах механики. Но в этой схватке он использует «Кинетическую энергию» удара противника, он создает «Опрокидывающий момент относительно точки опоры»... Словом, действует-то по законам механики!
Так неужели мы, люди, вооруженные техническими знаниями, опираясь на боевой опыт предков, могли бы не заметить лежащего на поверхности вывода, а именно:
необходимо перейти с интуитивного уровня на уровень осознанного применения, а точнее – учета законов механики в практике рукопашного боя.
Это позволит нам, в конечном счете, успешно решить двуединую задачу: как возрождения самой системы рукопашного боя (притом на более высоком уровне), так и совершенствования существующей системы подготовки воина-рукопашника.
Такой подход дает нам право говорить о новом стиле рукопашного боя. Именно о таком стиле, получившем название «Русский рукопашный бой по системе выживания», идет речь.
Этот стиль прошел испытания в так называемых «горячих точках», и показал свою боеспособность, спасая жизнь тем, кто овладел этим искусством.
В приложении механики к рукопашному бою автор исповедует два подхода:
– применение законов механики в строгом научном изложении;
– представление законов механики на ассоциативном уровне.
«...Опираясь на автомат, из «Жигулей» расслабленно-вяло вылез, поднялся во весь рост высокий, упакованный в набитую боеприпасами разгрузку бандит и удивленно, просто впиваясь глазами, словно желая запомнить, посмотрел на лежащего ничком Олега. Медлить было нельзя. Капитан Уфимцев снова открыл огонь, уничтожив боевика. Уже отползая от машины, Олег попал под автоматные очереди с двух отдаленных точек. Он не видел противника, уходя от пуль «нижней акробатикой». Пули, разбиваясь о каменистую почву где-то рядом, мелкими осколками резали руки, лицо. А тридцативосьмилетний ученик великого наставника армейских спецназовцев Алексея Кадочникова, ведя ответный огонь, уходил от поражения...».
Журнал «Милиция», № 10, октябрь 2000 г.
Сказанное отнюдь не означает того, что начинающий рукопашник должен сразу же засесть за изучение законов механики. Тем не менее, автор надеется, что это заставит его призадуматься.
Ведь многие рукопашники полагают, что они вовсе не нуждаются в каких-либо теоретических познаниях. Более того, некоторые из них, особенно это относится к одаренным природой мастерам, не любят теории и, как правило, не очень жалуют теоретиков. Слава Богу, автор не относит себя ни к числу первых, ни к числу вторых.
Прежде чем продолжить разговор, приведем, определение механики.
Механика – наука о движении объектов в пространстве и о силах, вызывающих это движение. Если речь идет о применении учения о движении и силах к решению практических задач, то говорят о прикладной механике (например, строительная механика, аэрогидромеханика, биомеханика и т.д.).
Как же приложить законы механики к практике рукопашного боя? Для начала отметим, что с точки зрения механики рукопашный бой представляет собой физическое явление, сущность которого проявляется в механическом взаимодействии объектов, находящихся в равновесии. По сути, целью рукопашного боя является выведение из равновесия одного из объектов.
Напомним: учет законов механики является одной из основных идеологических посылок вос-станавливаемой системы русского рукопашного боя.
И это произошло не потому, что автор окончил политехнический институт и имеет диплом инженера-механика; и вовсе не потому, что он некоторое время был начальником лаборатории кафедры механики военного училища. А потому (и только потому), что русский рукопашный бой издревле замешан на объективных законах механики. Наши предки испокон веков опирались на эти законы в жестоких рукопашных схватках с бесчисленными врагами. Конечно, это происходило неосознанно, на интуитивном уровне, да еще – на основе приобретавшегося в схватках горького опыта. Эта «наука» передавалась от поколения к поколению, от прадеда к деду, от деда к внуку.
Взглянув на рисунок, вы обратили внимание на то, как легко, с насмешливой улыбкой на лице, наш безоружный предок сбрасывает с коня вооруженного противника? Татарин с наглой самоуверенностью, замахнувшись нагайкой, выбрасывает левую руку, чтобы схватить крестьянина. Но тот ловит противника на встречном движении и – мы в этом не сомневаемся! – сбрасывает всадника наземь.
Так неужели мы, люди, вооруженные техническими знаниями, опираясь на боевой опыт предков, могли бы не заметить лежащего на поверхности вывода, а именно:
необходимо перейти с интуитивного уровня на уровень осознанного применения, а точнее – учета законов механики в практике рукопашного боя.
Это позволит нам, в конечном счете, успешно решить двуединую задачу: как возрождения самой системы рукопашного боя (притом на более высоком уровне), так и совершенствования существующей системы подготовки воина-рукопашника.
Такой подход дает нам право говорить о новом стиле рукопашного боя. Именно о таком стиле, получившем название «Русский рукопашный бой по системе выживания», идет речь.
Этот стиль прошел испытания в так называемых «горячих точках», и показал свою боеспособность, спасая жизнь тем, кто овладел этим искусством.
В приложении механики к рукопашному бою автор исповедует два подхода:
– применение законов механики в строгом научном изложении;
– представление законов механики на ассоциативном уровне.
«...Опираясь на автомат, из «Жигулей» расслабленно-вяло вылез, поднялся во весь рост высокий, упакованный в набитую боеприпасами разгрузку бандит и удивленно, просто впиваясь глазами, словно желая запомнить, посмотрел на лежащего ничком Олега. Медлить было нельзя. Капитан Уфимцев снова открыл огонь, уничтожив боевика. Уже отползая от машины, Олег попал под автоматные очереди с двух отдаленных точек. Он не видел противника, уходя от пуль «нижней акробатикой». Пули, разбиваясь о каменистую почву где-то рядом, мелкими осколками резали руки, лицо. А тридцативосьмилетний ученик великого наставника армейских спецназовцев Алексея Кадочникова, ведя ответный огонь, уходил от поражения...».
Журнал «Милиция», № 10, октябрь 2000 г.
КТО ЖЕ ОН – НАСТОЯЩИЙ РУКОПАШНИК?
Рукопашник – это человек, овладевший искусством рукопашного боя. Но одного этого мало. Настоящий рукопашник отличается многими дополнительными качествами.
Так кто же он – настоящий рукопашник? Это, прежде всего, воин-христианин, хранитель святой Веры и Отечества. Это высоко нравственная, духовно богатая личность. Это хранитель традиций своих предков. И, наконец, это человек, сильный духом, готовый отдать жизнь за Веру и Отечество. Настоящий рукопашник:
– владеет всеми видами оружия, начиная с грубой палки и кончая утонченной шпагой, а также современным огнестрельным оружием;
– умеет вести огонь, не прицеливаясь, на звук и вспышку, по ноге от бедра;
– умеет, не обнаруживая себя, вести разведку;
– может так организовать ближний бой, чтобы без потерь перейти к рукопашной схватке;
– обладает психологической устойчивостью к действиям в экстремальных ситуациях. Настоящий рукопашник проявляет себя тогда, когда надо не просто действовать, а действовать правильно, наилучшим образом в непредсказуемой обстановке, когда нет времени задуматься и нельзя ошибиться.
Настоящий рукопашник – человек дисциплинированный, обладающий чувством ответственности, умеющий мгновенно анализировать сложные ситуации боя, молниеносно принимающий единственно правильное решение и, не последнее, виртуозно владеющий своим телом.
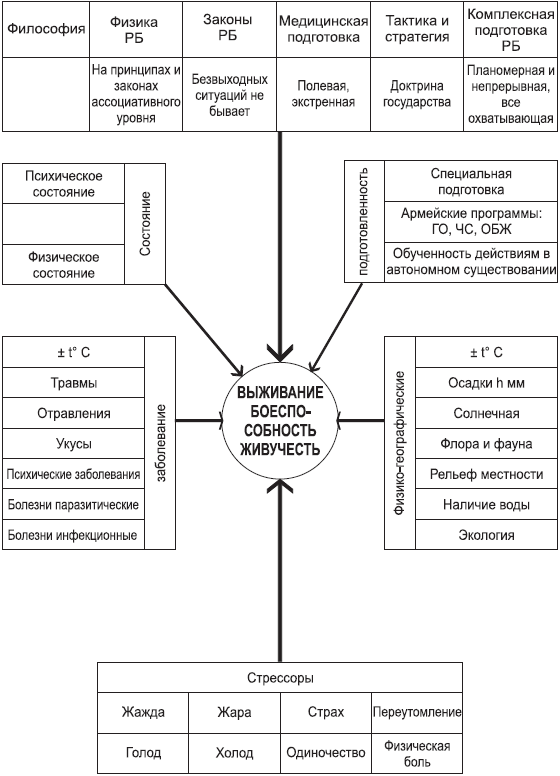
СТРУКТУРНАЯ СХЕМА ПРОГРАММЫ ПОДГОТОВКИ
Так кто же он – настоящий рукопашник? Это, прежде всего, воин-христианин, хранитель святой Веры и Отечества. Это высоко нравственная, духовно богатая личность. Это хранитель традиций своих предков. И, наконец, это человек, сильный духом, готовый отдать жизнь за Веру и Отечество. Настоящий рукопашник:
– владеет всеми видами оружия, начиная с грубой палки и кончая утонченной шпагой, а также современным огнестрельным оружием;
– умеет вести огонь, не прицеливаясь, на звук и вспышку, по ноге от бедра;
– умеет, не обнаруживая себя, вести разведку;
– может так организовать ближний бой, чтобы без потерь перейти к рукопашной схватке;
– обладает психологической устойчивостью к действиям в экстремальных ситуациях. Настоящий рукопашник проявляет себя тогда, когда надо не просто действовать, а действовать правильно, наилучшим образом в непредсказуемой обстановке, когда нет времени задуматься и нельзя ошибиться.
Настоящий рукопашник – человек дисциплинированный, обладающий чувством ответственности, умеющий мгновенно анализировать сложные ситуации боя, молниеносно принимающий единственно правильное решение и, не последнее, виртуозно владеющий своим телом.
СТРУКТУРНАЯ СХЕМА ПРОГРАММЫ ПОДГОТОВКИ
ГЛАВА 2
ЗАКОНЫ ФИЗИКИ И РУКОПАШНЫЙ БОЙ
ЗАКОНЫ ФИЗИКИ И ДВИГАТЕЛЬНАЯ ДЕЯТЕЛЬНОСТЬ ЧЕЛОВЕКА
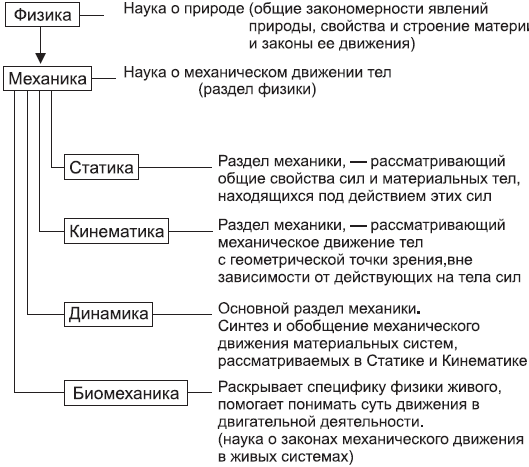
Физика – одна из основных областей есте-ствознания, наука об общих закономерностях явлений природы. Механика, как один из разделов физики, изучает закономерности механического движения и причины, вызывающие или изменяющие это движение. Под механическим движением при этом понимают изменение с течением времени взаимного расположения в пространстве тел или их частей.
Поэтому основная задача механики состоит в определении положения движущегося в пространстве тела в любой момент времени. Механика делится на три раздела: кинематику, динамику и статику. Кинематика изучает движение тел, не рассматривая причины, обусловливающие это движение. Динамика изучает законы движения тел и причины, которые вызывают или изменяют это движение. Статика изучает законы равновесия тел. Если известны законы движения тел, то из них можно установить законы равновесия. Поэтому законы статики отдельно от законов динамики физика не рассматривает.
Двигательная деятельность человека – одно из сложнейших явлений материального мира. Она сложна потому, что очень непросты функции органов движения. Она сложна и потому, что в ней участвует сознание как продукт наиболее организованной материи – мозга.
 В первую очередь речь идет об осознанной, целенаправленной активной деятельности человека, о понимании ее смысла, о возможности контролировать и планомерно совершенствовать свои движения. При помощи двигательной деятельности человек активно преобразует мир, свою собственную природу, физически совершенствуется.
В первую очередь речь идет об осознанной, целенаправленной активной деятельности человека, о понимании ее смысла, о возможности контролировать и планомерно совершенствовать свои движения. При помощи двигательной деятельности человек активно преобразует мир, свою собственную природу, физически совершенствуется.
Двигательная деятельность человека складывается из его действий, всегда имеющих цель и определенный смысл.
Двигательные действия осуществляются при помощи произвольных активных движений, совершаемых и управляемых работой мышц. Человек по собственной воле начинает движения, изменяет их и прекращает, когда цель достигнута.
Двигательные действия человека, в свою очередь, включают в себя механическое движение. Именно оно представляет непосредственную цель двигательного действия (переместиться самому, переместить (уронить) противника или партнера).
Поэтому основная задача механики состоит в определении положения движущегося в пространстве тела в любой момент времени. Механика делится на три раздела: кинематику, динамику и статику. Кинематика изучает движение тел, не рассматривая причины, обусловливающие это движение. Динамика изучает законы движения тел и причины, которые вызывают или изменяют это движение. Статика изучает законы равновесия тел. Если известны законы движения тел, то из них можно установить законы равновесия. Поэтому законы статики отдельно от законов динамики физика не рассматривает.
Двигательная деятельность человека – одно из сложнейших явлений материального мира. Она сложна потому, что очень непросты функции органов движения. Она сложна и потому, что в ней участвует сознание как продукт наиболее организованной материи – мозга.
Двигательная деятельность человека складывается из его действий, всегда имеющих цель и определенный смысл.
Двигательные действия осуществляются при помощи произвольных активных движений, совершаемых и управляемых работой мышц. Человек по собственной воле начинает движения, изменяет их и прекращает, когда цель достигнута.
Двигательные действия человека, в свою очередь, включают в себя механическое движение. Именно оно представляет непосредственную цель двигательного действия (переместиться самому, переместить (уронить) противника или партнера).
КИНЕМАТИКА ДВИЖЕНИЙ ЧЕЛОВЕКА
В биомеханике под кинематикой движений понимают «геометрию», то есть пространственную форму движений человека без учета его массы и действующих сил. Кинематика дает в целом только внешнюю картину движений. Причины возникновения и изменения движений раскрывает динамика.
Положение тела человека в пространстве в биомеханике принято описывать его местоположением, ориентацией и позой.
Местоположение характеризует, в какой части пространства находится в данный момент человек.
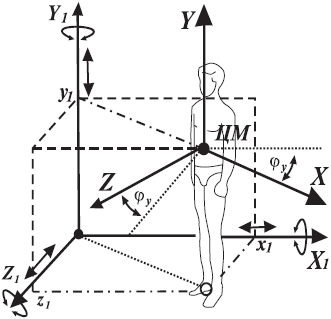
Рис. 2.
Ориентация тела иллюстрирует его поворот относительно неподвижной системы координат (вверх головой, горизонтально, вниз головой, «кругом»).
Поза тела показывает взаимное расположение отдельных частей тела человека относительно друг друга.
Определение местоположения обычно не связано с большими трудностями. Чтобы определить местоположение человека как твердого тела, достаточно указать три координаты какой-либо точки тела в неподвижной системе координат X1Y1Z1. (рис. 2.).
В качестве такой точки обычно выбирают центр масс (ЦМ) тела. В принятой системе координат местоположение тела определяется тремя координатами x1, y1, z1.
Определение ориентации тела человека – задача гораздо более трудная, особенно при сложных позах.
Прежде чем показать пути ее решения, остановимся на том, как определяются основные оси и плоскости человеческого тела.
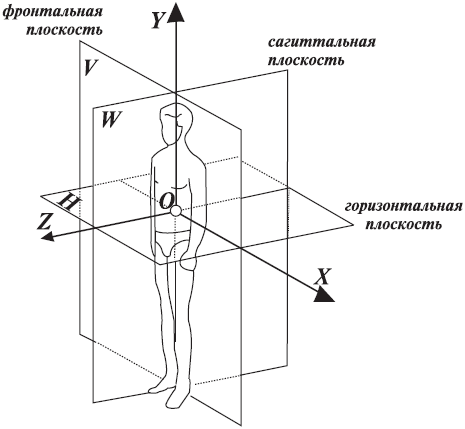 Рис. 3.
Рис. 3.
Оси тела образуют так называемую связанную систему координат XYZ, начало отсчета которой совмещают с центром масс (ЦМ) тела.
Для того, чтобы изменение ориентации связанной системы точнее отражало изменение ориентации тела в пространстве, направление продольной оси определяют так. Тело человека (в стойке руки вверх) делится горизонтальной плоскостью на две равные по весу половины. Линия, соединяющая центры масс верхней и нижней половин тела (и проходящая через общий ЦМ), и есть продольная ось тела. В основной стойке эта ось практически близка к вертикальной.
Поэтому продольную ось тела OY направляют вертикально; ось ОХ проводят горизонтально и называют фронтальной; ось ОZ направляют перпендикулярно первым двум осям и называют сагиттальной.
Оси связанной системы первоначально ориентированы так же, как и оси неподвижной системы. При повороте (вращении) тела вместе с ним относительно неподвижной системы поворачивается и связанная система координат.
Таким образом, ориентацию тела в пространстве характеризуют три угловых координаты jx, jy, jz (так называемые углы Эйлера).
Заметим, что при сложных позах положение ЦМ может выходить за пределы тела.
В биомеханике с целью облегчить описание движений человека (в частности, при выполнении отдельных элементов упражнений, приемов и т.д.), вводят понятия плоскостей тела.
Основные плоскости тела (рис. 3.) и всякие другие, параллельные им, ориентированы в системе трех взаимно перпендикулярных осей тела.
Вертикальная плоскость YOX, проходящая через ЦМ и разделяющая тело на переднюю и заднюю части (а также всякая параллельная ей плоскость), называется фронтальной.
Вертикальная плоскость YOZ, проходящая через ЦМ и разделяющая тело на левую и правую части, называется сагиттальной.
Горизонтальная плоскость ХОZ, проходящая через ЦМ и разделяющая тело на верхнюю и нижнюю части, называется горизонтальной.
При описании двигательных действий человека движения его тела описываются, соответственно, в указанных основных или параллельных им плоскостях.
Основой этой силовой конструкции, его опорным сооружением, является туловище, включающее шею и позвоночник с его более чем двумя десятками межпозвоночных соединений и мышечным оснащением.
Движения человека в значительной мере зависят от строения и свойств его тела. Чрезвычайная сложность строения и многообразие свойств тела человека, с одной стороны, делают очень сложными сами движения и управление ими. Но, с другой стороны, они обусловливают чрезвычайное богатство и разнообразие движений, до сих пор недоступное в целом ни одной самой совершенной машине.
Вся двигательная деятельность человека(поддержание местоположения и ориентации тела в пространстве, его перемещения, изменение позы и т. п.) осуществляется с помощью опорно-двигательного аппарата. Управление движениями означает управление именно опорно-двигательным аппаратом.
Исключительную роль в построении движений играет костно-суставная система (скелет). Она не только обеспечивает телу человека опору и сохранение формы, но обусловливает также высокую подвижность и разнообразие движений.
При оценке степени подвижности костно-суставной системы ее рассматривают как сложный пространственный механизм. Этот механизм, как известно, включает вполне определенное количество подвижных костей, соединенных различного рода суставами (шарнирами), обеспечивающими соответствующим частям тела от одной до трех степеней свободы.
Мышцы облегают скелет со всех сторон, где они по условиям подвижности могут понадобиться. Если у суставов имеются стороны, в которые они не должны двигаться (например, локтевой сустав должен сгибаться в стороны, а не вперед-назад), то с этих сторон вместо нежной мышечной ткани размещается более грубая связочно-сухожильная.
Так или иначе, но каждый сустав закреплен со всех сторон гибкими растяжками – мышцами или связками. При этом мышцы, кроме их прямых функций движителя, загружаются еще добавочной – опорной. Зато получается явный выигрыш по части гибкости опорной конструкции.
Положение тела человека в пространстве в биомеханике принято описывать его местоположением, ориентацией и позой.
Местоположение характеризует, в какой части пространства находится в данный момент человек.
Рис. 2.
Ориентация тела иллюстрирует его поворот относительно неподвижной системы координат (вверх головой, горизонтально, вниз головой, «кругом»).
Поза тела показывает взаимное расположение отдельных частей тела человека относительно друг друга.
Определение местоположения обычно не связано с большими трудностями. Чтобы определить местоположение человека как твердого тела, достаточно указать три координаты какой-либо точки тела в неподвижной системе координат X1Y1Z1. (рис. 2.).
В качестве такой точки обычно выбирают центр масс (ЦМ) тела. В принятой системе координат местоположение тела определяется тремя координатами x1, y1, z1.
Определение ориентации тела человека – задача гораздо более трудная, особенно при сложных позах.
Прежде чем показать пути ее решения, остановимся на том, как определяются основные оси и плоскости человеческого тела.
Оси тела образуют так называемую связанную систему координат XYZ, начало отсчета которой совмещают с центром масс (ЦМ) тела.
Для того, чтобы изменение ориентации связанной системы точнее отражало изменение ориентации тела в пространстве, направление продольной оси определяют так. Тело человека (в стойке руки вверх) делится горизонтальной плоскостью на две равные по весу половины. Линия, соединяющая центры масс верхней и нижней половин тела (и проходящая через общий ЦМ), и есть продольная ось тела. В основной стойке эта ось практически близка к вертикальной.
Поэтому продольную ось тела OY направляют вертикально; ось ОХ проводят горизонтально и называют фронтальной; ось ОZ направляют перпендикулярно первым двум осям и называют сагиттальной.
Оси связанной системы первоначально ориентированы так же, как и оси неподвижной системы. При повороте (вращении) тела вместе с ним относительно неподвижной системы поворачивается и связанная система координат.
Таким образом, ориентацию тела в пространстве характеризуют три угловых координаты jx, jy, jz (так называемые углы Эйлера).
Заметим, что при сложных позах положение ЦМ может выходить за пределы тела.
В биомеханике с целью облегчить описание движений человека (в частности, при выполнении отдельных элементов упражнений, приемов и т.д.), вводят понятия плоскостей тела.
Основные плоскости тела (рис. 3.) и всякие другие, параллельные им, ориентированы в системе трех взаимно перпендикулярных осей тела.
Вертикальная плоскость YOX, проходящая через ЦМ и разделяющая тело на переднюю и заднюю части (а также всякая параллельная ей плоскость), называется фронтальной.
Вертикальная плоскость YOZ, проходящая через ЦМ и разделяющая тело на левую и правую части, называется сагиттальной.
Горизонтальная плоскость ХОZ, проходящая через ЦМ и разделяющая тело на верхнюю и нижнюю части, называется горизонтальной.
При описании двигательных действий человека движения его тела описываются, соответственно, в указанных основных или параллельных им плоскостях.
Основой этой силовой конструкции, его опорным сооружением, является туловище, включающее шею и позвоночник с его более чем двумя десятками межпозвоночных соединений и мышечным оснащением.
Движения человека в значительной мере зависят от строения и свойств его тела. Чрезвычайная сложность строения и многообразие свойств тела человека, с одной стороны, делают очень сложными сами движения и управление ими. Но, с другой стороны, они обусловливают чрезвычайное богатство и разнообразие движений, до сих пор недоступное в целом ни одной самой совершенной машине.
Вся двигательная деятельность человека(поддержание местоположения и ориентации тела в пространстве, его перемещения, изменение позы и т. п.) осуществляется с помощью опорно-двигательного аппарата. Управление движениями означает управление именно опорно-двигательным аппаратом.
Исключительную роль в построении движений играет костно-суставная система (скелет). Она не только обеспечивает телу человека опору и сохранение формы, но обусловливает также высокую подвижность и разнообразие движений.
При оценке степени подвижности костно-суставной системы ее рассматривают как сложный пространственный механизм. Этот механизм, как известно, включает вполне определенное количество подвижных костей, соединенных различного рода суставами (шарнирами), обеспечивающими соответствующим частям тела от одной до трех степеней свободы.
Мышцы облегают скелет со всех сторон, где они по условиям подвижности могут понадобиться. Если у суставов имеются стороны, в которые они не должны двигаться (например, локтевой сустав должен сгибаться в стороны, а не вперед-назад), то с этих сторон вместо нежной мышечной ткани размещается более грубая связочно-сухожильная.
Так или иначе, но каждый сустав закреплен со всех сторон гибкими растяжками – мышцами или связками. При этом мышцы, кроме их прямых функций движителя, загружаются еще добавочной – опорной. Зато получается явный выигрыш по части гибкости опорной конструкции.
АНАТОМО-ФУНКЦИОНАЛЬНЫЕ ОСОБЕННОСТИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА
Перемещения человека в пространстве и исполнение двигательных функций обеспечиваются опорно-двигательной системой человеческого тела. Опорно-двигательный аппарат человека включает три по-разному организованных подсистемы: костную, или скелет, связочно-суставную и мышечную. Первые две – скелет и связочно-суставной аппарат – представляют собой пассивную часть системы, а мышечная – активную.
Костно-суставная система
Скелет (рис. 4) обеспечивает телу человека опору и сохранение формы, а также защищает внутренние органы. Он является основной силовой конструкцией тела и воспринимает все нагрузки, действующие на человека. Скелет состоит из 148 подвижных костей и, соответственно, 147 сочленений (суставов).
Основой этой силовой конструкции, его опорным сооружением, является туловище, включающее шею и позвоночник с его более чем двумя десятками межпозвоночных соединений и мышечным оснащением.
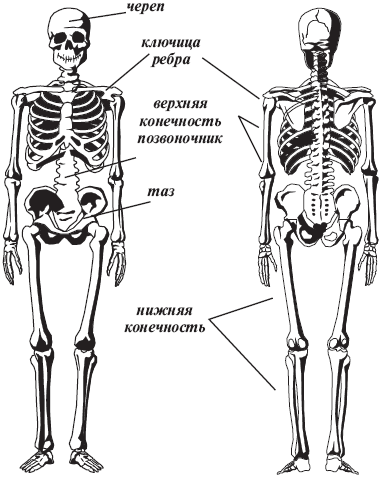 Рис. 4
Рис. 4
В эволюционном развитии человеку пришлось дорого заплатить за прямохождение. Ходьба в вертикальном положении обусловила, прежде всего, возрастание нагрузок на позвоночник. При ходьбе на четвереньках позвоночник функционировал, к примеру, как свод моста или поперечная балка. При переходе к прямохождению он приобрел сходство с эластичной колонной, которая, изгибаясь, амортизирует толчки при ходьбе и переносит вес туловища на стопы ног. В конце концов в процессе эволюции позвоночный столб приобрел сложную S-образную форму (рис. 5). Изгибы позвоночника обеспечивают ему упругость, что важно при ходьбе и беге. При резких движениях и прыжках позвоночник предохраняет мозг от сотрясения.
Туловище человека держится прямо только благодаря непрерывному напряжению всех мышц, «расчаливающих» позвоночный столб, подобно тому, как ванты расчаливают корабельную мачту. Такая конструкция обеспечивает телу человека исключительно гибкую подвижность, приспособляемость и маневренность.
Суставы скелета по своим функциям и устройству являются шарнирами.
Сочленение головы с позвоночником, плечевой и тазобедренный суставы устроены по принципу шарового шарнира, состоящего из двух соприкасающихся сферических поверхностей – выпуклой и вогнутой – равного радиуса. Локтевой и коленный суставы, суставы пальцев напоминают цилиндрический шарнир, допускающий вращение только в одной плоскости.
Важную роль в работе сочленений играет трение. Без него в суставах было бы невозможно преобразование поступательного движения мышц во вращательное движение конечностей.
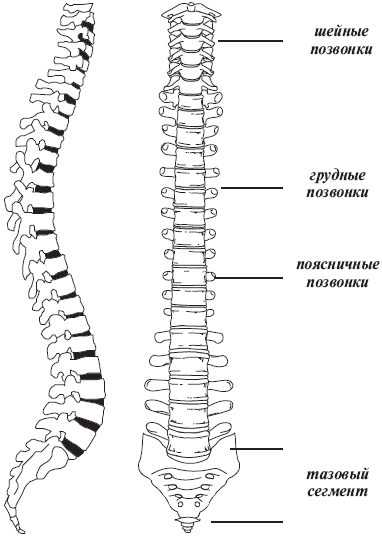 Рис. 5
Рис. 5
Суставы человека служат примером совершенства творений природы. Проблема трения и изнашиваемости в суставах решена природой на таком уровне, о котором инженеры-специалисты по трению могут только мечтать. Динамические нагрузки, превышающие тысячи ньютонов, практическое отсутствие трения (коэффициент трения ¦mp = 0,003!), никакого «техобслуживания» и безотказная работа в течение всей жизни – таков перечень качеств природного шарнира-сустава.
Суставы играют исключительную роль в построении движений. Они определяют высокую подвижность всех звеньев тела человека. По-видимому, именно по этой причине в биомеханике зачастую говорят о степенях свободы суставов. Думается, это не совсем так.
В механике, напомним, под числом степеней свободы понимают число независимых координат, полностью определяющих положение в пространстве физического тела, в том числе и тела человека. Поэтому, когда речь идет о суставе, как части тела человека, то уместно говорить об обеспечении суставом степени свободы той или иной части тела. То есть, по-видимому, следует говорить не о степени свободы, а о степени подвижности сустава. Так, например, тазобедренный и плечевой суставы обеспечивают по три степени свободы поворота бедра и плеча относительно туловища. Локтевой и коленный суставы обеспечивают две степени свободы поворота предплечья и голени относительно плеча и бедра. Фаланги пальцев соединены суставами, обеспечивающими одну степень свободы.
С туловищем, как основой силовой пространственной конструкции тела, посредством плечевых и тазобедренных суставов соединены четыре многозвенные рычажные системы конечностей.
Нижняя конечность включает (рис. 6,а): тазобедренный сустав, бедренную кость, коленный сустав, голень (большую и малую берцовые кости), голеностопный сустав и стопу. На рис. 6,б изображена механическая модель, воспроизводящая суставную подвижность ноги человека.
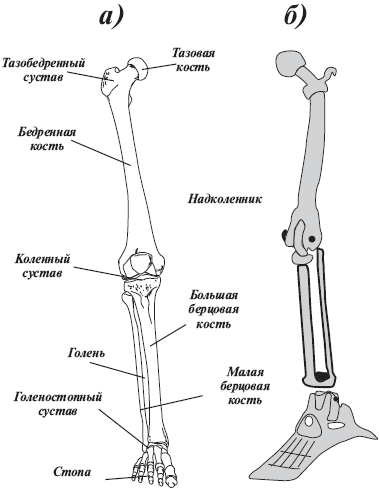 Рис. 6
Рис. 6
Тазобедренный шаровой сустав (рис. 7) допускает достаточно большие диапазоны движения: до 130° при маховых движениях конечности и до 80° – при движениях в стороны.
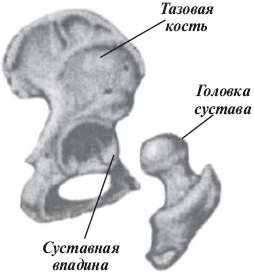 Рис. 7
Рис. 7
Коленный сустав работает как цилиндрический шарнир, но устроен довольно сложно (рис. 8). Пределы сгибания-разгибания колена являются рекордными для всех сочленений человеческого тела: около 140° так называемой активной подвижности (за счет работы собственных мышц этого сочленения) и свыше 170° пассивной активности (за счет внешних сил). Полусогнутый коленный сустав допускает и небольшое продольное вращение голени до 40-60°.
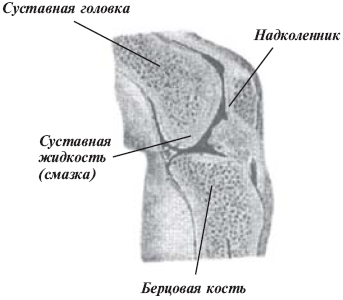 Рис. 8
Рис. 8
Голеностопный сустав включает как бы два сочленения, напоминающие карданные соединения в технике и расположенные очень близко одно за другим. Они позволяют стопе наклонятся относительно голени во все стороны на 45-55°.
Сама стопа – многокостное упругое устройство – приспособлена к восприятию нагрузки, соответствующей 5-6-кратному значению веса человека. Однако активная внутренняя подвижность стопы ничтожна и ею пренебрегают.
Верхняя конечность включает (рис. 9): плечелопаточный сустав, плечевую кость, локтевой сустав, предплечье (локтевую и лучевую кости), лучезапястное сочленение и кисть.
 Рис. 9
Рис. 9
Устройство руки аналогично устройству нижней конечности, но более сложное. Плечелопаточный шаровой шарнир руки (рис. 10) гораздо подвижнее тазобедренного и допускает обширные движения: до 190° в вертикальной (глубинной) плоскости, до 180° в стороны (в поперечной плоскости) и до 100° во фронтальной плоскости.
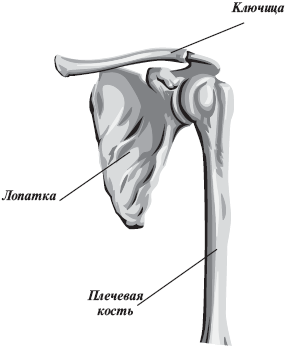 Рис. 10
Рис. 10
Локтевой сустав представляет собой (рис. 11) цилиндрический шарнир, обеспечивающий сгибание-разгибание руки в плоскости движения предплечья в пределах до 145°.
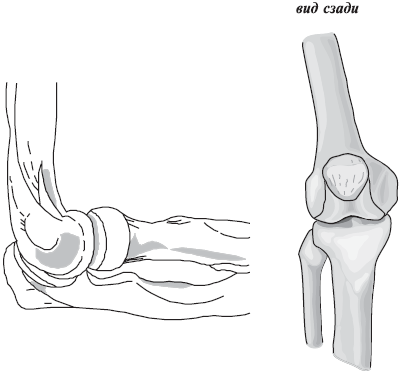 Рис. 11
Рис. 11
Трудовая деятельность внесла в строение руки человека много усовершенствований, отличающих ее от передних конечностей животных. Только рука человека имеет способность поворачивать предплечье с кистью относительно его продольной оси (рис. 12). Общий диапазон этих движений превосходит 180°.
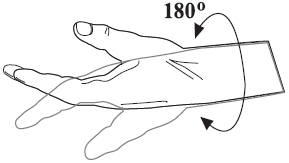 Рис. 12
Рис. 12
В повоедневнойжизни это именно то вращательное движение, которым мы пользуемся, поворачивая ключ в двери.
В биомеханике эти повороты предплечья называют пронацией и супинацией. Бернштейн приводит очень простое и забавное правило для запоминания этой непривычной терминологии: «Поверните кисть ладонью кверху и скажите: «Несу суп». Это движение и есть супинация. Затем опрокиньте кисть ладонью вниз и скажите: «Пролил». Это – «пронация».
Соединение между предплечьем и кистью (лучезапястное сочленение) само по себе обладает двумя видами подвижности (рис. 13): вверх-вниз на 170°, вправо-влево на 60°. Эти два направления подвижности в сочетании с третьим – пронацией и супинацией – равносильны тому, как если бы кисть была подвешена к руке на втором шаровом шарнире (следующим за плечелопаточным). В итоге два последовательно расположенных шаровых шарнира в сочетании с локтевым суставом не только обеспечивают кисти возможность принять любое положение и изменить направление движения, но и позволяют сделать это при самых разнообразных положениях плеча и предплечья.
 Рис. 13
Рис. 13
Кисть в отличие от стопы обладает большой внутренней активностью. Скелет кисти представляет собой целую тонкую мозаику из косточек. Благодаря способности большого пальца кисти противополагаться каждому из остальных, кисть является великолепным приспособлением для обхватывания и прочного удержания предметов любой формы. При этом еще остается возможность двигать локтем, т. е. смещать плечо и предплечье при неподвижном туловище.
Почему важно знать степень подвижности суставов опорно-двигательного аппарата человека? Да потому, что подвижность плечевых и тазобедренных суставов определяет число степеней свободы верхних и нижних конечностей. А это, в свою очередь, регламентирует построение движений при выполнении двигательных действий (например, применение болевых приемов, «выключение» суставов при выведении противника из равновесия и т.д.).
Предельные диапазоны подвижности в суставах ограничивают применимость моделей, используемых, в частности, при моделировании верхних и нижних конечностей.
Так, например, плечевой сустав допускает вращение плеча в ограниченном пространстве, в пределах некоего конуса, сметаемого плечом при предельных отклонениях в суставе.
Эти ограничения уменьшают число степеней свободы руки по крайней мере на единицу при достижении предельных отклонении в каждой из основных плоскостей тела.
Кроме того, принудительное вращение предплечья вокруг продольной оси до упора «выключает» локтевой сустав, лишая руку двух степеней свободы.
Основой этой силовой конструкции, его опорным сооружением, является туловище, включающее шею и позвоночник с его более чем двумя десятками межпозвоночных соединений и мышечным оснащением.
В эволюционном развитии человеку пришлось дорого заплатить за прямохождение. Ходьба в вертикальном положении обусловила, прежде всего, возрастание нагрузок на позвоночник. При ходьбе на четвереньках позвоночник функционировал, к примеру, как свод моста или поперечная балка. При переходе к прямохождению он приобрел сходство с эластичной колонной, которая, изгибаясь, амортизирует толчки при ходьбе и переносит вес туловища на стопы ног. В конце концов в процессе эволюции позвоночный столб приобрел сложную S-образную форму (рис. 5). Изгибы позвоночника обеспечивают ему упругость, что важно при ходьбе и беге. При резких движениях и прыжках позвоночник предохраняет мозг от сотрясения.
Туловище человека держится прямо только благодаря непрерывному напряжению всех мышц, «расчаливающих» позвоночный столб, подобно тому, как ванты расчаливают корабельную мачту. Такая конструкция обеспечивает телу человека исключительно гибкую подвижность, приспособляемость и маневренность.
Суставы скелета по своим функциям и устройству являются шарнирами.
Сочленение головы с позвоночником, плечевой и тазобедренный суставы устроены по принципу шарового шарнира, состоящего из двух соприкасающихся сферических поверхностей – выпуклой и вогнутой – равного радиуса. Локтевой и коленный суставы, суставы пальцев напоминают цилиндрический шарнир, допускающий вращение только в одной плоскости.
Важную роль в работе сочленений играет трение. Без него в суставах было бы невозможно преобразование поступательного движения мышц во вращательное движение конечностей.
Суставы человека служат примером совершенства творений природы. Проблема трения и изнашиваемости в суставах решена природой на таком уровне, о котором инженеры-специалисты по трению могут только мечтать. Динамические нагрузки, превышающие тысячи ньютонов, практическое отсутствие трения (коэффициент трения ¦mp = 0,003!), никакого «техобслуживания» и безотказная работа в течение всей жизни – таков перечень качеств природного шарнира-сустава.
Суставы играют исключительную роль в построении движений. Они определяют высокую подвижность всех звеньев тела человека. По-видимому, именно по этой причине в биомеханике зачастую говорят о степенях свободы суставов. Думается, это не совсем так.
В механике, напомним, под числом степеней свободы понимают число независимых координат, полностью определяющих положение в пространстве физического тела, в том числе и тела человека. Поэтому, когда речь идет о суставе, как части тела человека, то уместно говорить об обеспечении суставом степени свободы той или иной части тела. То есть, по-видимому, следует говорить не о степени свободы, а о степени подвижности сустава. Так, например, тазобедренный и плечевой суставы обеспечивают по три степени свободы поворота бедра и плеча относительно туловища. Локтевой и коленный суставы обеспечивают две степени свободы поворота предплечья и голени относительно плеча и бедра. Фаланги пальцев соединены суставами, обеспечивающими одну степень свободы.
С туловищем, как основой силовой пространственной конструкции тела, посредством плечевых и тазобедренных суставов соединены четыре многозвенные рычажные системы конечностей.
Нижняя конечность включает (рис. 6,а): тазобедренный сустав, бедренную кость, коленный сустав, голень (большую и малую берцовые кости), голеностопный сустав и стопу. На рис. 6,б изображена механическая модель, воспроизводящая суставную подвижность ноги человека.
Тазобедренный шаровой сустав (рис. 7) допускает достаточно большие диапазоны движения: до 130° при маховых движениях конечности и до 80° – при движениях в стороны.
Коленный сустав работает как цилиндрический шарнир, но устроен довольно сложно (рис. 8). Пределы сгибания-разгибания колена являются рекордными для всех сочленений человеческого тела: около 140° так называемой активной подвижности (за счет работы собственных мышц этого сочленения) и свыше 170° пассивной активности (за счет внешних сил). Полусогнутый коленный сустав допускает и небольшое продольное вращение голени до 40-60°.
Голеностопный сустав включает как бы два сочленения, напоминающие карданные соединения в технике и расположенные очень близко одно за другим. Они позволяют стопе наклонятся относительно голени во все стороны на 45-55°.
Сама стопа – многокостное упругое устройство – приспособлена к восприятию нагрузки, соответствующей 5-6-кратному значению веса человека. Однако активная внутренняя подвижность стопы ничтожна и ею пренебрегают.
Верхняя конечность включает (рис. 9): плечелопаточный сустав, плечевую кость, локтевой сустав, предплечье (локтевую и лучевую кости), лучезапястное сочленение и кисть.
Устройство руки аналогично устройству нижней конечности, но более сложное. Плечелопаточный шаровой шарнир руки (рис. 10) гораздо подвижнее тазобедренного и допускает обширные движения: до 190° в вертикальной (глубинной) плоскости, до 180° в стороны (в поперечной плоскости) и до 100° во фронтальной плоскости.
Локтевой сустав представляет собой (рис. 11) цилиндрический шарнир, обеспечивающий сгибание-разгибание руки в плоскости движения предплечья в пределах до 145°.
Трудовая деятельность внесла в строение руки человека много усовершенствований, отличающих ее от передних конечностей животных. Только рука человека имеет способность поворачивать предплечье с кистью относительно его продольной оси (рис. 12). Общий диапазон этих движений превосходит 180°.
В повоедневнойжизни это именно то вращательное движение, которым мы пользуемся, поворачивая ключ в двери.
В биомеханике эти повороты предплечья называют пронацией и супинацией. Бернштейн приводит очень простое и забавное правило для запоминания этой непривычной терминологии: «Поверните кисть ладонью кверху и скажите: «Несу суп». Это движение и есть супинация. Затем опрокиньте кисть ладонью вниз и скажите: «Пролил». Это – «пронация».
Соединение между предплечьем и кистью (лучезапястное сочленение) само по себе обладает двумя видами подвижности (рис. 13): вверх-вниз на 170°, вправо-влево на 60°. Эти два направления подвижности в сочетании с третьим – пронацией и супинацией – равносильны тому, как если бы кисть была подвешена к руке на втором шаровом шарнире (следующим за плечелопаточным). В итоге два последовательно расположенных шаровых шарнира в сочетании с локтевым суставом не только обеспечивают кисти возможность принять любое положение и изменить направление движения, но и позволяют сделать это при самых разнообразных положениях плеча и предплечья.
Кисть в отличие от стопы обладает большой внутренней активностью. Скелет кисти представляет собой целую тонкую мозаику из косточек. Благодаря способности большого пальца кисти противополагаться каждому из остальных, кисть является великолепным приспособлением для обхватывания и прочного удержания предметов любой формы. При этом еще остается возможность двигать локтем, т. е. смещать плечо и предплечье при неподвижном туловище.
Почему важно знать степень подвижности суставов опорно-двигательного аппарата человека? Да потому, что подвижность плечевых и тазобедренных суставов определяет число степеней свободы верхних и нижних конечностей. А это, в свою очередь, регламентирует построение движений при выполнении двигательных действий (например, применение болевых приемов, «выключение» суставов при выведении противника из равновесия и т.д.).
Предельные диапазоны подвижности в суставах ограничивают применимость моделей, используемых, в частности, при моделировании верхних и нижних конечностей.
Так, например, плечевой сустав допускает вращение плеча в ограниченном пространстве, в пределах некоего конуса, сметаемого плечом при предельных отклонениях в суставе.
Эти ограничения уменьшают число степеней свободы руки по крайней мере на единицу при достижении предельных отклонении в каждой из основных плоскостей тела.
Кроме того, принудительное вращение предплечья вокруг продольной оси до упора «выключает» локтевой сустав, лишая руку двух степеней свободы.
Мышечно-сухожильная система
Мышечная система опорно-двигательного аппарата обеспечивает высокую подвижность человека. Она состоит из скелетных мышц, сухожилий и связок.
Скелетные мышцы предназначены для создания тяговых усилий, они участвуют в движениях туловища и конечностей, в значительной мере определяющих движения человека. Функциональное назначение основных скелетных мышц показано на рис. 14. Это мышцы, предназначенные для сохранения вертикального положения тела; мышцы, сгибающие и поворачивающие туловище; мышцы, поднимающие, сгибающие и разгибающие конечности и другие. Форма мышцы зависит от места ее расположения и выполняемой функции.
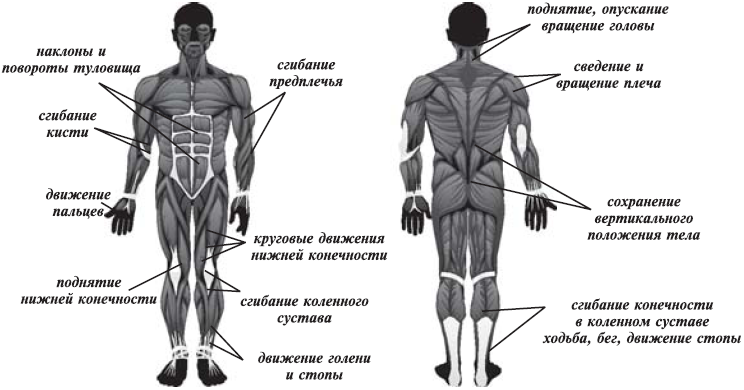 Рис. 14
Рис. 14
Скелетные мышцы являются «источником» силы в теле человека. Они образованы так называемой поперечнополосатой мышечной тканью, волокна которой собраны в пучки (рис. 15). Внутри волокон проходят белковые нити, благодаря которым мышцы способны сокращаться. Эта способность мышц имеет огромное значение. Сокращаясь, мышца действует на кость, как на рычаг и производит механическую работу. Именно сокращение скелетных мышц обеспечивает перемещение одних частей тела по отношению к другим и в конечном счете – движение тела в пространстве.
 Рис. 15
Рис. 15
Любое мышечное сокращение связано с расходом энергии. Источником энергии служат распад и окисление органических веществ (углеводов, жиров, нуклеиновых кислот). Эти вещества в мышечных волокнах подвергаются химическим превращениям с участием кислорода. В результате образуются продукты расщепления (главным образом углекислый газ и вода) и освобождается энергия. Протекающая через мышцы кровь постоянно снабжает их питательными веществами и кислородом и уносит из них углекислый газ и другие продукты распада.
Скелетные мышцы предназначены для создания тяговых усилий, они участвуют в движениях туловища и конечностей, в значительной мере определяющих движения человека. Функциональное назначение основных скелетных мышц показано на рис. 14. Это мышцы, предназначенные для сохранения вертикального положения тела; мышцы, сгибающие и поворачивающие туловище; мышцы, поднимающие, сгибающие и разгибающие конечности и другие. Форма мышцы зависит от места ее расположения и выполняемой функции.
Скелетные мышцы являются «источником» силы в теле человека. Они образованы так называемой поперечнополосатой мышечной тканью, волокна которой собраны в пучки (рис. 15). Внутри волокон проходят белковые нити, благодаря которым мышцы способны сокращаться. Эта способность мышц имеет огромное значение. Сокращаясь, мышца действует на кость, как на рычаг и производит механическую работу. Именно сокращение скелетных мышц обеспечивает перемещение одних частей тела по отношению к другим и в конечном счете – движение тела в пространстве.
Любое мышечное сокращение связано с расходом энергии. Источником энергии служат распад и окисление органических веществ (углеводов, жиров, нуклеиновых кислот). Эти вещества в мышечных волокнах подвергаются химическим превращениям с участием кислорода. В результате образуются продукты расщепления (главным образом углекислый газ и вода) и освобождается энергия. Протекающая через мышцы кровь постоянно снабжает их питательными веществами и кислородом и уносит из них углекислый газ и другие продукты распада.