Мышцы состоят из мягких тканей и работают только на растяжение (они могут тянуть, но не могут толкать). Поэтому в выполнении человеком любого движения участвуют две группы мышц: сгибатели и разгибатели суставов.
На рисунке 16 показана работа мышц локтевого сустава. Сгибание руки в суставе осуществляется при сокращении мышцы-сгибателя и одновременном расслаблении мышцы-разгибателя.
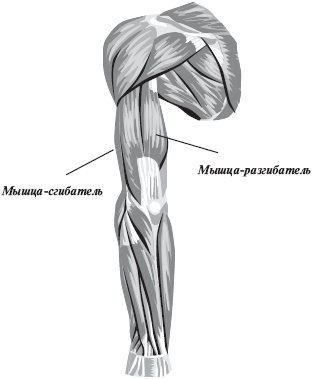 Рис. 16
Рис. 16
При разгибании в суставе функции мышц меняются. Мышцы свободно висящей вдоль тела руки могут одновременно находиться в расслабленном состоянии. При удержании груза (ядра, гири) в горизонтально вытянутой руке наблюдается одновременное сокращение мышц.
Степени подвижности костно-суставной системы
ХАРАКТЕРИСТИКА ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА С ПОЗИЦИИ БИОМЕХАНИКИ
РЫЧАГИ, ИХ ХАРАКТЕРИСТИКИ И ВИДЫ
ОСНОВЫ БИОМЕХАНИКИ МЫШЦ
На рисунке 16 показана работа мышц локтевого сустава. Сгибание руки в суставе осуществляется при сокращении мышцы-сгибателя и одновременном расслаблении мышцы-разгибателя.
При разгибании в суставе функции мышц меняются. Мышцы свободно висящей вдоль тела руки могут одновременно находиться в расслабленном состоянии. При удержании груза (ядра, гири) в горизонтально вытянутой руке наблюдается одновременное сокращение мышц.
Степени подвижности костно-суставной системы
Вся двигательная деятельность человека (поддержание местоположения и ориентации тела в пространстве, его перемещения, изменение позы и т. п.) осуществляется с помощью опорно-двигательного аппарата. Управление движениями означает управление именно опорно-двигательным аппаратом.
Исключительную роль в построении движений играет костно-суставная система (скелет). Она не только обеспечивает телу человека опору и сохранение формы, но обусловливает также высокую подвижность и разнообразие движений.
При оценке степени подвижности костно-суставной системы ее рассматривают как сложный пространственный механизм. Этот механизм, как известно, включает вполне определенное количество подвижных костей, соединенных различного рода суставами (шарнирами), обеспечивающими соответствующим частям тела от одной до трех степеней свободы.
Структурная схема костно-суставной системы, как многозвенного пространственного механизма представлена на рис. 17.
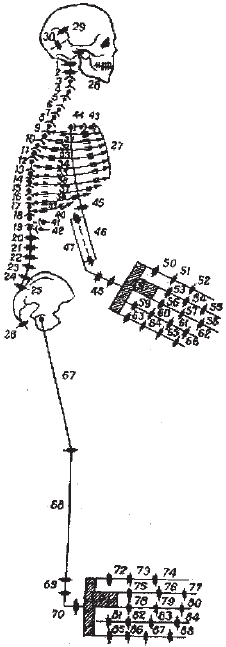 Рис. 17
Рис. 17
Подвижность такого пространственного механизма в «Теории механизмов и машин» определяется по формуле следующего вида:
 где n – число подвижных костей;
где n – число подвижных костей;
ki – число суставов определенных классов (i =3,4,5).
Скелет человека имеет подвижных костей n = 148; суставов, обеспечивающих три степени свободы k3 -29, две степени свободы k4= 33, одну степень свободы k5 = 85.
Подставив числовые значения в формулу, получим громадное число степеней подвижности костно-суставной конструкции человека:
П = 244!
Преодоление непомерного избытка степеней подвижности костно-суставной системы обеспечивается мышечно – сухожильной системой.
Мышцы облегают скелет со всех сторон, где они по условиям подвижности могут понадобиться. Если у суставов имеются стороны, в которые они не должны двигаться (например, локтевой сустав – сгибаться в стороны, а не вперед-назад), то с этих сторон вместо нежной мышечной ткани размещается более грубая связочно-сухожильная.
Так или иначе, но каждый сустав закреплен со всех сторон гибкими растяжками – мышцами или связками, так сказать расчален ими.
Это очень похоже на то, как расчаливаются высокие мачты судов или радиопередающих станций. При этом мышцы кроме их прямых функций движителя загружаются еще добавочной – опорной. Зато получается явный выигрыш по части гибкости опорной конструкции.
Исключительную роль в построении движений играет костно-суставная система (скелет). Она не только обеспечивает телу человека опору и сохранение формы, но обусловливает также высокую подвижность и разнообразие движений.
При оценке степени подвижности костно-суставной системы ее рассматривают как сложный пространственный механизм. Этот механизм, как известно, включает вполне определенное количество подвижных костей, соединенных различного рода суставами (шарнирами), обеспечивающими соответствующим частям тела от одной до трех степеней свободы.
Структурная схема костно-суставной системы, как многозвенного пространственного механизма представлена на рис. 17.
Подвижность такого пространственного механизма в «Теории механизмов и машин» определяется по формуле следующего вида:
ki – число суставов определенных классов (i =3,4,5).
Скелет человека имеет подвижных костей n = 148; суставов, обеспечивающих три степени свободы k3 -29, две степени свободы k4= 33, одну степень свободы k5 = 85.
Подставив числовые значения в формулу, получим громадное число степеней подвижности костно-суставной конструкции человека:
П = 244!
Преодоление непомерного избытка степеней подвижности костно-суставной системы обеспечивается мышечно – сухожильной системой.
Мышцы облегают скелет со всех сторон, где они по условиям подвижности могут понадобиться. Если у суставов имеются стороны, в которые они не должны двигаться (например, локтевой сустав – сгибаться в стороны, а не вперед-назад), то с этих сторон вместо нежной мышечной ткани размещается более грубая связочно-сухожильная.
Так или иначе, но каждый сустав закреплен со всех сторон гибкими растяжками – мышцами или связками, так сказать расчален ими.
Это очень похоже на то, как расчаливаются высокие мачты судов или радиопередающих станций. При этом мышцы кроме их прямых функций движителя загружаются еще добавочной – опорной. Зато получается явный выигрыш по части гибкости опорной конструкции.
ХАРАКТЕРИСТИКА ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА С ПОЗИЦИИ БИОМЕХАНИКИ
Движения человека в значительной мере зависят от того, каково строение его тела и каковы его свойства. Чрезвычайная сложность строения и многообразие свойств тела человека, с одной стороны, делают очень сложными и сами движения и управление ими. Но, с другой стороны, они обусловливают необычайное богатство, разнообразие движений, до сих пор недоступное в полном объеме ни одной, самой совершенной, машине.
Биомеханика – наука, изучающая механические движения самих биологических тел и в этих биологических телах. Однако тело человека и сверхсложный управляющий орган – нервная система – делают анализ всей системы движений чрезвычайно сложным и трудоемким. Кроме того, при изучении движений человека и причин, их вызывающих, было бы неправильно ограничиваться только представлениями механики. Необходимо иметь в виду биологическую природу «механизмов» человеческого тела. Анализ деятельности двигательного аппарата с биологической точки зрения позволяет вскрыть своеобразие устройства и принципа действий «живых механизмов». Главнейшие биологические особенности, отличающие двигательный аппарат животных и человека от неживых технических механизмов, состоят в следующем:
1. Аппарат движения животных существ построен из живых тканей и органов, в которых постоянно, в том числе и в покое, происходит обмен веществ. Химические превращения молекул, вступающих в разнообразные реакции с другими органическими и неорганическими веществами, являются сутью внутриклеточного обмена веществ и специфической рабочей деятельности клеток (например, сократительной). В связи с этим становится понятной чрезвычайная зависимость строения и функции клеток и органов от их рабочего использования, от интенсивности протекающего в них обмена веществ. Для поддержания тканей и органов двигательного аппарата в состоянии высокой работоспособности необходимо их постоянное и должное использование. Морфологическое и функциональное совершенствование под влиянием работы и деградация, при бездеятельности, являются важной особенностью двигательного аппарата животных и человека.
2. В технической машине производимые ею движения предопределены раз и навсегда самой формой сочленений между движущимися частями. Напротив, двигательный аппарат человека построен так, что из одних и тех же структурных единиц (костей, суставов, связок, мышц) может быть образовано множество различных механизмов с различными рабочими заданиями, разными скоростями и траекториями движения.
3. Двигательная деятельность животных и человека, в том числе произвольная, представляет собой систему безусловных и условных рефлексов на раздражения из внешнего и внутреннего мира, действующих в данное время или действовавших ранее и сохранившихся в нервных центрах в виде следов.
Таким образом, двигательная деятельность обеспечивается не только работой собственно двигательного аппарата, но и работой органов чувств и центральной нервной системы. Многообразное использование одних и тех же структур двигательного аппарата обеспечивается способностью рефлекторного механизма к образованию временных связей. Происходит непрерывное приспособление движений к текущим условиям среды, т. е. «уравновешивание» организма со средой.
Все двигательные действия человека и животных выполняются в результате напряжений и расслаблений мышц, которые вызваны нервными импульсами, поступающими к мышцам по двигательным нервам.
Но для многих исследовательских целей и не нужен такой всеобъемлющий анализ. Отвлекаясь от деталей анатомического строения и физиологических механизмов управления двигательным актом, рассматривается упрощённая модель тела человека – биомеханическая система. Она обладает всеми основными свойствами, существенными для выполнения двигательной функции.
Таким образом, биомеханическая система – это копия, упрощённая модель тела человека, на которой можно изучать закономерности движений.
С точки зрения механики, двигательный аппарат человека представляет собой механизм, состоящий из сложной системы рычагов, приводимых в действие мышцами.
Первым шагом от понятий анатомических к механическим является представление о биокинематической паре.
Биокинематическая пара – это подвижное (кинематическое) соединение двух костных звеньев, в котором возможности движений определяются его строением и управляющим воздействием мышц.
В технических механизмах соединение двух звеньев – кинематические пары – устроены обычно так, что возможны лишь определенные, заранее заданные движения. Одни возможности не ограничены (их характеризуют степени свободы тела), другие полностью ограничены (их характеризуют степени связи).
Под степенями свободы понимают независимые перемещения тела или его частей в пространстве. Эти независимые перемещения могут носить либо поступательный характер, либо вращательный (простые формы механического движения). В случае сложного (составного) движения его всегда раскладывают на составляющие простые формы. При этом под поступающим понимают движение, при котором линия, мысленно проведенная в теле, перемещается параллельно самой себе. А при вращательном движении все точки тела описывают окружности, центры которых находятся на одной прямой, называемой осью вращения.
Например, если у физического тела нет никаких ограничений (связей), оно может двигаться в пространстве относительно трёх взаимно перпендикулярных осей (поступательно), а также вокруг них (вращательно). Следовательно, у такого тела шесть (3+3) степеней свободы.
Каждая связь уменьшает число степеней свободы. Зафиксировав одну точку свободного тела, сделав его звеном биокинематической пары, можно сразу лишить его 3-х степеней свободы – возможных линейных перемещений вдоль трёх основных осей координат.
Почти во всех суставах (кроме межфаланговых, лучелоктевых и атлантоосевого) степеней свободы больше, чем одна. Поэтому устройство пассивного аппарата в них обусловливает неопределённость движений, множество возможных перемещений («неполносвязный механизм»). Управляющие воздействия мышц формируют дополнительные связи и оставляют для движения только одну степень свободы («полносвязный механизм»). Так обеспечивается одна-единственная возможность движений – именно та, которая требуется. Множество степеней свободы биокинематической пары в многоосных суставах требует для выполнения каждого определённого движения:
а) выбора необходимой траектории;
б) управления движением по траектории (направлением и величиной скорости);
в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории.
Биокинематические пары, соединяясь последовательно или параллельно, образуют биокинематические цепи.
Биокинематическая цепь, в которой конечное звено свободно, называется незамкнутой. Например, свободные конечности, когда их концевые звенья свободны (боец в изготовке к рукопашному бою).
Если в биокинематической цепи нет свободного конечного звена, то она является замкнутой (например, два противника, сцепившиеся в захвате друг с другом).
В замкнутой или незамкнутой цепи невозможно одиночное, изолированное движение, т. е. движение в одном соединении. Так, сгибая и разгибая ногу для удара, можно убедиться в том, что движение в любом суставе непременно вызывает движение в других. Таким образом, в замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых.
Рассматривая тело человека как сложный биомеханизм, кости как жёсткие звенья, а суставы как кинематические пары определённых классов, для всего человека имеем:
– подвижных костей – 148,
– суставов с 3-мя степенями свободы – 29,
– суставов с 2-мя степенями свободы – 33,
– суставов с 1-й степенью свободы – 85,
– всего степеней свободы для всего биомеханизма – 244.
Понятие «кинематическая цепь» перенесено в биомеханику из технической механики, где применяется для описания и анализа кинематики механизмов. Под кинематикой понимают внешнюю картину движения, происходящего в пространстве и во времени. Соответственно и в биомеханике оно применимо для изучения и анализа кинематики опорно-двигательного аппарата, т.е. в процессе рассмотрения линейных и угловых перемещений, скоростей, ускорений звеньев тела – относительных и абсолютных (в выбранной системе отсчёта).
В тех же случаях, когда представляет интерес динамика движений, развиваемые моменты суставных сил и силы взаимодействия звеньев тела между собой и с другими телами, когда анализируются силовые и энергетические возможности двигательного аппарата, понятие «биокинематическая цепь» уже не может удовлетворять. Здесь вводится понятие «динамическая цепь», обозначающая систему последовательно или параллельно соединённых силовых звеньев.
Под динамикой понимают сущность движения, его причины: прежде всего силовые и масс-инерционные характеристики.
Как биокинематические, так и биодинамические цепи могут быть последовательными (простыми) и разветвлёнными. Однако для динамических цепей понятие «замкнутая» лишено целесообразности, так как оно означает лишь наложение новых динамических (силовых) факторов, т. е. не вносит ничего принципиально нового.
Функциональные характеристики одинаковых силовых звеньев у разных людей неодинаковы. Это связано с различиями в росте, конституции, массе и физическом развитии. В связи с этим наиболее целесообразная структура заданного движения очень часто индивидуальна, т.е. отличается от общепринятой структуры движений, определяемой рациональной техникой управления. В основе этого лежит стремление компенсировать функциональную недостаточность одних звеньев за счёт функциональной избыточности других звеньев динамической цепи. Компенсация осуществляется за счёт:
– изменения нагрузки на силовые звенья;
– перераспределения скоростей движений звеньев.
Движения звеньев – суставные движения – совершаются в результате наличия суставных моментов.
Механическое движение биологических тел называют двигательным действием.
Для того чтобы количественно оценить двигательное действие, в том числе – рассчитать суставные моменты, следует перейти к механическому представлению о рычаге.
Биомеханика – наука, изучающая механические движения самих биологических тел и в этих биологических телах. Однако тело человека и сверхсложный управляющий орган – нервная система – делают анализ всей системы движений чрезвычайно сложным и трудоемким. Кроме того, при изучении движений человека и причин, их вызывающих, было бы неправильно ограничиваться только представлениями механики. Необходимо иметь в виду биологическую природу «механизмов» человеческого тела. Анализ деятельности двигательного аппарата с биологической точки зрения позволяет вскрыть своеобразие устройства и принципа действий «живых механизмов». Главнейшие биологические особенности, отличающие двигательный аппарат животных и человека от неживых технических механизмов, состоят в следующем:
1. Аппарат движения животных существ построен из живых тканей и органов, в которых постоянно, в том числе и в покое, происходит обмен веществ. Химические превращения молекул, вступающих в разнообразные реакции с другими органическими и неорганическими веществами, являются сутью внутриклеточного обмена веществ и специфической рабочей деятельности клеток (например, сократительной). В связи с этим становится понятной чрезвычайная зависимость строения и функции клеток и органов от их рабочего использования, от интенсивности протекающего в них обмена веществ. Для поддержания тканей и органов двигательного аппарата в состоянии высокой работоспособности необходимо их постоянное и должное использование. Морфологическое и функциональное совершенствование под влиянием работы и деградация, при бездеятельности, являются важной особенностью двигательного аппарата животных и человека.
2. В технической машине производимые ею движения предопределены раз и навсегда самой формой сочленений между движущимися частями. Напротив, двигательный аппарат человека построен так, что из одних и тех же структурных единиц (костей, суставов, связок, мышц) может быть образовано множество различных механизмов с различными рабочими заданиями, разными скоростями и траекториями движения.
3. Двигательная деятельность животных и человека, в том числе произвольная, представляет собой систему безусловных и условных рефлексов на раздражения из внешнего и внутреннего мира, действующих в данное время или действовавших ранее и сохранившихся в нервных центрах в виде следов.
Таким образом, двигательная деятельность обеспечивается не только работой собственно двигательного аппарата, но и работой органов чувств и центральной нервной системы. Многообразное использование одних и тех же структур двигательного аппарата обеспечивается способностью рефлекторного механизма к образованию временных связей. Происходит непрерывное приспособление движений к текущим условиям среды, т. е. «уравновешивание» организма со средой.
Все двигательные действия человека и животных выполняются в результате напряжений и расслаблений мышц, которые вызваны нервными импульсами, поступающими к мышцам по двигательным нервам.
Но для многих исследовательских целей и не нужен такой всеобъемлющий анализ. Отвлекаясь от деталей анатомического строения и физиологических механизмов управления двигательным актом, рассматривается упрощённая модель тела человека – биомеханическая система. Она обладает всеми основными свойствами, существенными для выполнения двигательной функции.
Таким образом, биомеханическая система – это копия, упрощённая модель тела человека, на которой можно изучать закономерности движений.
С точки зрения механики, двигательный аппарат человека представляет собой механизм, состоящий из сложной системы рычагов, приводимых в действие мышцами.
Первым шагом от понятий анатомических к механическим является представление о биокинематической паре.
Биокинематическая пара – это подвижное (кинематическое) соединение двух костных звеньев, в котором возможности движений определяются его строением и управляющим воздействием мышц.
В технических механизмах соединение двух звеньев – кинематические пары – устроены обычно так, что возможны лишь определенные, заранее заданные движения. Одни возможности не ограничены (их характеризуют степени свободы тела), другие полностью ограничены (их характеризуют степени связи).
Под степенями свободы понимают независимые перемещения тела или его частей в пространстве. Эти независимые перемещения могут носить либо поступательный характер, либо вращательный (простые формы механического движения). В случае сложного (составного) движения его всегда раскладывают на составляющие простые формы. При этом под поступающим понимают движение, при котором линия, мысленно проведенная в теле, перемещается параллельно самой себе. А при вращательном движении все точки тела описывают окружности, центры которых находятся на одной прямой, называемой осью вращения.
Например, если у физического тела нет никаких ограничений (связей), оно может двигаться в пространстве относительно трёх взаимно перпендикулярных осей (поступательно), а также вокруг них (вращательно). Следовательно, у такого тела шесть (3+3) степеней свободы.
Каждая связь уменьшает число степеней свободы. Зафиксировав одну точку свободного тела, сделав его звеном биокинематической пары, можно сразу лишить его 3-х степеней свободы – возможных линейных перемещений вдоль трёх основных осей координат.
Почти во всех суставах (кроме межфаланговых, лучелоктевых и атлантоосевого) степеней свободы больше, чем одна. Поэтому устройство пассивного аппарата в них обусловливает неопределённость движений, множество возможных перемещений («неполносвязный механизм»). Управляющие воздействия мышц формируют дополнительные связи и оставляют для движения только одну степень свободы («полносвязный механизм»). Так обеспечивается одна-единственная возможность движений – именно та, которая требуется. Множество степеней свободы биокинематической пары в многоосных суставах требует для выполнения каждого определённого движения:
а) выбора необходимой траектории;
б) управления движением по траектории (направлением и величиной скорости);
в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории.
Биокинематические пары, соединяясь последовательно или параллельно, образуют биокинематические цепи.
Биокинематическая цепь, в которой конечное звено свободно, называется незамкнутой. Например, свободные конечности, когда их концевые звенья свободны (боец в изготовке к рукопашному бою).
Если в биокинематической цепи нет свободного конечного звена, то она является замкнутой (например, два противника, сцепившиеся в захвате друг с другом).
В замкнутой или незамкнутой цепи невозможно одиночное, изолированное движение, т. е. движение в одном соединении. Так, сгибая и разгибая ногу для удара, можно убедиться в том, что движение в любом суставе непременно вызывает движение в других. Таким образом, в замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых.
Рассматривая тело человека как сложный биомеханизм, кости как жёсткие звенья, а суставы как кинематические пары определённых классов, для всего человека имеем:
– подвижных костей – 148,
– суставов с 3-мя степенями свободы – 29,
– суставов с 2-мя степенями свободы – 33,
– суставов с 1-й степенью свободы – 85,
– всего степеней свободы для всего биомеханизма – 244.
Понятие «кинематическая цепь» перенесено в биомеханику из технической механики, где применяется для описания и анализа кинематики механизмов. Под кинематикой понимают внешнюю картину движения, происходящего в пространстве и во времени. Соответственно и в биомеханике оно применимо для изучения и анализа кинематики опорно-двигательного аппарата, т.е. в процессе рассмотрения линейных и угловых перемещений, скоростей, ускорений звеньев тела – относительных и абсолютных (в выбранной системе отсчёта).
В тех же случаях, когда представляет интерес динамика движений, развиваемые моменты суставных сил и силы взаимодействия звеньев тела между собой и с другими телами, когда анализируются силовые и энергетические возможности двигательного аппарата, понятие «биокинематическая цепь» уже не может удовлетворять. Здесь вводится понятие «динамическая цепь», обозначающая систему последовательно или параллельно соединённых силовых звеньев.
Под динамикой понимают сущность движения, его причины: прежде всего силовые и масс-инерционные характеристики.
Как биокинематические, так и биодинамические цепи могут быть последовательными (простыми) и разветвлёнными. Однако для динамических цепей понятие «замкнутая» лишено целесообразности, так как оно означает лишь наложение новых динамических (силовых) факторов, т. е. не вносит ничего принципиально нового.
Функциональные характеристики одинаковых силовых звеньев у разных людей неодинаковы. Это связано с различиями в росте, конституции, массе и физическом развитии. В связи с этим наиболее целесообразная структура заданного движения очень часто индивидуальна, т.е. отличается от общепринятой структуры движений, определяемой рациональной техникой управления. В основе этого лежит стремление компенсировать функциональную недостаточность одних звеньев за счёт функциональной избыточности других звеньев динамической цепи. Компенсация осуществляется за счёт:
– изменения нагрузки на силовые звенья;
– перераспределения скоростей движений звеньев.
Движения звеньев – суставные движения – совершаются в результате наличия суставных моментов.
Механическое движение биологических тел называют двигательным действием.
Для того чтобы количественно оценить двигательное действие, в том числе – рассчитать суставные моменты, следует перейти к механическому представлению о рычаге.
РЫЧАГИ, ИХ ХАРАКТЕРИСТИКИ И ВИДЫ
Рычаг – это твёрдое тело, имеющее точку опоры и способное вращаться вокруг этой точки – оси вращения; приспособление, служащее для преобразования силы. В рычаге действует, по крайней мере, две силы с противоположными моментами.
Костные рычаги – звенья тела, подвижно соединённые в суставах под действием приложенных сил, могут либо сохранять своё положение, либо изменять его. Они служат для передачи движения и работы на расстояние.
Когда силы приложены по обе стороны от оси (точки опоры) рычага, его называют двуплечим, а когда по одну сторону – одноплечим. Для разных мышц, прикреплённых в разных местах костного звена, рычаг может быть разного рода. В природе существуют три рода рычагов: рычаги I-го («весы»), II-го(«тачка») и III-го(«подъемный кран») родов.
Каждый рычаг имеет следующие элементы:
– точку опоры (ось вращения, точка 0);
– как минимум две силы (f и F);
– точки приложения этих сил (А и В);
– плечи рычага (расстояния от точки опоры до точек приложения сил – АО и ВО);
– плечи сил (наикратчайшие расстояния от точки опоры до линий действий сил – опущенные на неё перпендикуляры АО и 0В).
Мерой действия силы на рычаг служит её момент относительно точки опоры – вращательный момент. Момент силы определяется произведением силы на плечо этой силы.
Mf = F * OВ
Mf= F * АО
Момент силы – это векторная величина. Если сила лежит не в плоскости, перпендикулярной оси, то находят составляющую силы, лежащую в этой плоскости. Она и вызывает момент силы относительно оси. Остальные составляющие на момент силы не влияют .
Когда противоположные относительно оси сустава моменты сил равны, звено либо сохраняет своё положение, либо продолжает движение с постоянной скоростью (моменты сил уравновешены). Если же один из моментов сил больше другого, звено получает ускорение в направлении его действия.
В опорно-двигательном аппарате присутствуют рычаги всех трёх родов, причём значительно больше рычагов III-го рода, рычагов скорости, так как мышцы крепятся в основном вблизи суставов.
Таким образом, двигательный аппарат человека по природе своей в большей степени быстрый и ловкий, чем сильный. Кроме этого, во всех костных рычагах имеются потери в силе ввиду того, что мышцы крепятся к костям под острым или тупым углом.
В рукопашном бою силой, совершающей работу, является прикладываемое к противнику усилие, а противодействующей силой – усилие противника. Для преодоления противодействующей на рычаге силы необходимо либо увеличить силу, совершающую работу, либо изменить длину плеча, через которое совершается работа. Поскольку силовые возможности почти всегда ограничены, а бой может вестись со значительно превосходящим по силам противником, то основным способом работы с помощью рычагов является перемещение точки опоры. В качестве точки опоры могут использоваться любые части тела (своего и противника), а также оружия и подручных средств.
Костные рычаги – звенья тела, подвижно соединённые в суставах под действием приложенных сил, могут либо сохранять своё положение, либо изменять его. Они служат для передачи движения и работы на расстояние.
Когда силы приложены по обе стороны от оси (точки опоры) рычага, его называют двуплечим, а когда по одну сторону – одноплечим. Для разных мышц, прикреплённых в разных местах костного звена, рычаг может быть разного рода. В природе существуют три рода рычагов: рычаги I-го («весы»), II-го(«тачка») и III-го(«подъемный кран») родов.
Каждый рычаг имеет следующие элементы:
– точку опоры (ось вращения, точка 0);
– как минимум две силы (f и F);
– точки приложения этих сил (А и В);
– плечи рычага (расстояния от точки опоры до точек приложения сил – АО и ВО);
– плечи сил (наикратчайшие расстояния от точки опоры до линий действий сил – опущенные на неё перпендикуляры АО и 0В).
Мерой действия силы на рычаг служит её момент относительно точки опоры – вращательный момент. Момент силы определяется произведением силы на плечо этой силы.
Mf = F * OВ
Mf= F * АО
Момент силы – это векторная величина. Если сила лежит не в плоскости, перпендикулярной оси, то находят составляющую силы, лежащую в этой плоскости. Она и вызывает момент силы относительно оси. Остальные составляющие на момент силы не влияют .
Когда противоположные относительно оси сустава моменты сил равны, звено либо сохраняет своё положение, либо продолжает движение с постоянной скоростью (моменты сил уравновешены). Если же один из моментов сил больше другого, звено получает ускорение в направлении его действия.
В опорно-двигательном аппарате присутствуют рычаги всех трёх родов, причём значительно больше рычагов III-го рода, рычагов скорости, так как мышцы крепятся в основном вблизи суставов.
Таким образом, двигательный аппарат человека по природе своей в большей степени быстрый и ловкий, чем сильный. Кроме этого, во всех костных рычагах имеются потери в силе ввиду того, что мышцы крепятся к костям под острым или тупым углом.
В рукопашном бою силой, совершающей работу, является прикладываемое к противнику усилие, а противодействующей силой – усилие противника. Для преодоления противодействующей на рычаге силы необходимо либо увеличить силу, совершающую работу, либо изменить длину плеча, через которое совершается работа. Поскольку силовые возможности почти всегда ограничены, а бой может вестись со значительно превосходящим по силам противником, то основным способом работы с помощью рычагов является перемещение точки опоры. В качестве точки опоры могут использоваться любые части тела (своего и противника), а также оружия и подручных средств.
ОСНОВЫ БИОМЕХАНИКИ МЫШЦ
Известно, что мышца управляется центральной нервной системой. Биомеханика рассматривает, что происходит с состоянием и положением мышцы в результате нервных влияний, т. е. связь линейных перемещений концов мышц (кинематика движения) и усилий, развиваемых ею (динамика движения). Механика мышечного сокращения заключается в связи напряжений в мышце с её деформацией.
Для полного описания биомеханических свойств мышц используют следующие определения:
– жёсткость – способность противодействовать прикладываемым силам. Она проявляется как упругость и квазижесткость;
– релаксация – падение напряжения (натяжения) с течением времени;
– прочность – понимается как прочность на разрыв.
Часто при исследовании механических свойств тела человека и его отдельных элементов не учитывается влияние сухожилий. Сухожилия нередко рассматривают как абсолютно нерастяжимую, гибкую часть мышцы. А сухожилия способны амортизировать резкие толчки и обладают жёстко-демпфирующими свойствами.
Прочность сухожилий превышает прочность мышц в 2 раза. Сухожилия человека разрываются, в основном, в месте крепления к мышцам.
Сила, скорость и экономичность движений зависят от того, в какой степени человеку удаётся использовать биомеханические свойства своего двигательного аппарата. Сила и скорость движения могут быть повышены за счёт использования упругих сил, экономичность – за счёт использования рекуперации (повторного использования) механической энергии и уменьшения потерь на рассеивание.
Кроме того, необходимо знать, что с возрастанием скорости активного сокращения мышцы величина её предельного напряжения уменьшается и наоборот, т.е. для того, чтобы нанести как можно более быстрый (резкий) удар (рукой или ногой), необходимо как можно больше расслабить ту часть тела, которая этот удар наносит перед выполнением ударного движения.
Биомеханические свойства мышц в решающей мере влияют на это. Общеизвестно, что в прыжках вверх с места, выполняемых из приседа после паузы, результат будет ниже, чем в прыжке из приседа без паузы, так как во втором случае используются силы упругой деформации предварительно растянутых мышц. Считается, что рекуперация энергии упругой деформации является основной причиной высокой экономичности бега человека, прыжков кенгуру.
В мышечных и сухожильных структурах может накапливаться значительное количество энергии упругой деформации. Однако накопленная энергия упругой деформации не всегда используется в полной мере. Степень её использования зависит от условий выполнения движений, в частности, от времени между растяжением и сокращением мышцы. Необходимо научиться правильно использовать эту энергию при действиях в рукопашном бою.
В процессе тренировок надо учитывать, что механическая прочность сухожилий и связок увеличивается сравнительно медленно. При форсированном развитии скоростно-силовых качеств может возникнуть несоответствие между возросшими скоростно-силовыми возможностями мышечного аппарата и недостаточной прочностью связок и сухожилий. Это грозит потенциальными травмами. Поэтому во время тренировок необходимо обращать внимание на укрепление сухожильно-связочного аппарата. Это достигается объёмной тренировочной работой невысокой интенсивности. Желательно, чтобы движения выполнялись с максимально возможной для данного сустава амплитудой и во всех направлениях.
Для полного описания биомеханических свойств мышц используют следующие определения:
– жёсткость – способность противодействовать прикладываемым силам. Она проявляется как упругость и квазижесткость;
– релаксация – падение напряжения (натяжения) с течением времени;
– прочность – понимается как прочность на разрыв.
Часто при исследовании механических свойств тела человека и его отдельных элементов не учитывается влияние сухожилий. Сухожилия нередко рассматривают как абсолютно нерастяжимую, гибкую часть мышцы. А сухожилия способны амортизировать резкие толчки и обладают жёстко-демпфирующими свойствами.
Прочность сухожилий превышает прочность мышц в 2 раза. Сухожилия человека разрываются, в основном, в месте крепления к мышцам.
Сила, скорость и экономичность движений зависят от того, в какой степени человеку удаётся использовать биомеханические свойства своего двигательного аппарата. Сила и скорость движения могут быть повышены за счёт использования упругих сил, экономичность – за счёт использования рекуперации (повторного использования) механической энергии и уменьшения потерь на рассеивание.
Кроме того, необходимо знать, что с возрастанием скорости активного сокращения мышцы величина её предельного напряжения уменьшается и наоборот, т.е. для того, чтобы нанести как можно более быстрый (резкий) удар (рукой или ногой), необходимо как можно больше расслабить ту часть тела, которая этот удар наносит перед выполнением ударного движения.
Биомеханические свойства мышц в решающей мере влияют на это. Общеизвестно, что в прыжках вверх с места, выполняемых из приседа после паузы, результат будет ниже, чем в прыжке из приседа без паузы, так как во втором случае используются силы упругой деформации предварительно растянутых мышц. Считается, что рекуперация энергии упругой деформации является основной причиной высокой экономичности бега человека, прыжков кенгуру.
В мышечных и сухожильных структурах может накапливаться значительное количество энергии упругой деформации. Однако накопленная энергия упругой деформации не всегда используется в полной мере. Степень её использования зависит от условий выполнения движений, в частности, от времени между растяжением и сокращением мышцы. Необходимо научиться правильно использовать эту энергию при действиях в рукопашном бою.
В процессе тренировок надо учитывать, что механическая прочность сухожилий и связок увеличивается сравнительно медленно. При форсированном развитии скоростно-силовых качеств может возникнуть несоответствие между возросшими скоростно-силовыми возможностями мышечного аппарата и недостаточной прочностью связок и сухожилий. Это грозит потенциальными травмами. Поэтому во время тренировок необходимо обращать внимание на укрепление сухожильно-связочного аппарата. Это достигается объёмной тренировочной работой невысокой интенсивности. Желательно, чтобы движения выполнялись с максимально возможной для данного сустава амплитудой и во всех направлениях.
Конец бесплатного ознакомительного фрагмента