Страница:
Публике мало известно о масштабах работ правительственных лабораторий в данном направлении, полагаю, что их данные засекречены. В открытых средствах массовой информации можно найти публикации о проектах частных исследовательских фирм и изобретателей. Одним из ярких исторических примеров в данной области является «инерциоид Дина».
Страховой агент из Вашингтона, Норман Л. Дин (Norman L. Dean) получил американский патент № 2,886,976 13 июля 1956 года. Устройство называется "System For Converting Rotary Motion Into Unidirectional Motion”, то есть, «система преобразования вращательного движения в однонаправленное». Второй патент взят позже, US Patent № 3,182,517 от 11 мая 1965 года «Variable Oscillator System», название означает «Система с изменяемым осциллятором».
Критики работ Нормана Дина выражают свои сомнения по поводу его результатов, так как собрав аналог его изобретения строго по описанию, взятому из патента, они не получают работоспособного движителя. Предполагается, что автор описал в тексте патента принцип в сокращенном виде, не раскрывая некоторые важные детали конструкции.
На рис. 31 показан автор данного изобретения Норман Дин, и его движитель. Это не один инерциоид, а несколько парных инерциоидов, каждый из них имеет по два встречных вращающихся эксцентрика, что позволяет устройству в целом хорошо компенсировать вибрации.
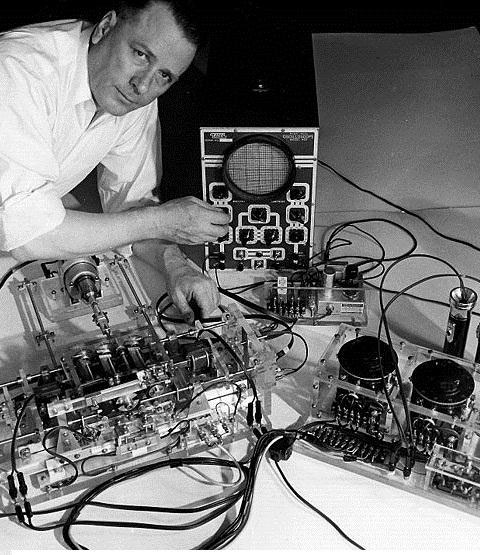 Рис. 33. Норман Дин и его движитель
Рис. 33. Норман Дин и его движитель
На рис. 34 показан рисунок из патента № 2,886,976, к которому добавлены названия основных деталей конструкции «движителя Дина».
 Рис. 34. Схема движителя Нормана Дина
Рис. 34. Схема движителя Нормана Дина
Особенность конструкции «машины Дина» в том, что эксцентрики подвешены в корпусе упруго, на пружинах. Первоначально, Дин просто экспериментировал с парой эксцентриков, закрепленных на перемычке, которая, с помощью пружин, крепится к корпусу аппарата, как показано на рис. 35.
 Рис. 35. Компенсация боковых колебаний двумя эксцентриками
Рис. 35. Компенсация боковых колебаний двумя эксцентриками
Перемычка и эксцентрики – это пара взаимодействующих тел. Их взаимодействие происходит в соответствии с законом сохранения импульса. Цикл движения эксцентриков делится на два полуцикла, создавая компенсацию силы тяжести на половине цикла. Рассмотрим цикл вращения, рис. 35: движение эксцентриков вниз вызывает реакцию опоры, начинается движение перемычки вверх. Далее, движение эксцентриков вверх вызывает реакцию опоры, которая проявляется как движение перемычки вниз. Поскольку вращение двух эксцентриков (пары) встречное, то Дину удалось компенсировать боковые колебания корпуса, а перемычка с вращающимися эксцентриками колебалась по вертикали.
Как и следовало ожидать, суммарный импульс силы, действующий на корпус данного устройства за длительный интервал времени, был равен нулю.
Далее, Дин создал «асимметрию цикла», которую мы обсуждали в схеме Толчина. В нужный момент, в конструкции включается «тормоз», рис. 36. В момент прохождения перемычки через среднее положение, она упирается в выдвижной поперечный тормоз, управляемый электромагнитом. В результате, получаются разные по величине силы взаимодействия колеблющейся вверх-вниз перемычки с корпусом.
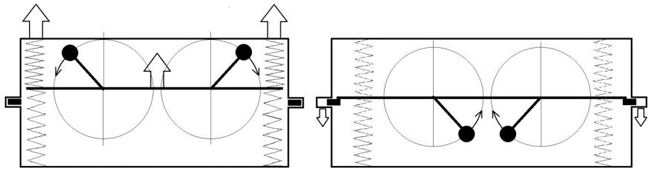 Рис. 36. Идея движителя Нормана Дина
Рис. 36. Идея движителя Нормана Дина
Выбрав правильный момент торможения, можно получить однонаправленную суммарную силу, в нужном направлении. Движитель с одной парой эксцентриков работает рывками, поэтому Дин соединил шесть движителей вместе, но расположение эксцентриситета на каждом из них сдвинул на угол 60 градусов. Таким образом, он получил полный цикл 360 градусов, и более-менее равномерную однонаправленную силу тяги.
Анализируя процесс энергообмена в движителе Дина, необходимо отметить важную роль упругого взаимодействия, хотя этот аспект мало обсуждается в публикациях по данной теме. В устройстве Дина, происходит упругая передача импульса от перемычки корпусу в одну сторону (вверх), и неупругое торможение перемычки о поперечный тормоз, при движении в другую сторону. Теоретически, данная задача хорошо проработана, и относится к физике взаимодействия тел.
Известно, что столкновение тел может приводить к разным результатам: при упругом столкновении тела и корпуса устройства, в основном, корпусу передается импульс, а при неупругом столкновении (ударной деформации) большая часть импульса преобразуется в тепло. Схема эксперимента, который был мной показан аудитории конференции «Новые Идеи в Естествознании», в 1996 году, изображена на рис. 37.
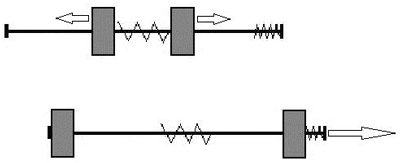 Рис. 37. Эксперимент по упругому и неупругому взаимодействию
Рис. 37. Эксперимент по упругому и неупругому взаимодействию
Идея эксперимента довольно старая, она была опубликована, хотя и без объяснений причин данного явления, еще в 1935 году [17].
Итак, предположим, что на направляющем стержне могут скользить влево и вправо два грузика с отверстиями, например, два свинцовых цилиндра диаметром 15 мм и высотой 30 мм. Между ними расположена пружина, которая в начальный момент сжата, и удерживается в данном положении нитью. В правой части оси, был установлен резиновый амортизатор толщиной 5 мм.
На рис. 38 показаны три последовательных кадра из видеозаписи данного эксперимента, который проводился на полированном столе в аудитории конференции «Новые идеи в естествознании», 1996 год. Суть эксперимента состоит в следующем: нить, которая удерживает пружину в сжатом состоянии, разрушают каким-либо образом, например, пережигают. Тела, оттолкнувшись друг от друга в центральной точке корпуса, скользят в разные стороны, и каждое из них, по-разному, взаимодействует с опорой в конце своего пути.
 Рис. 38. Эксперимент по асимметрии взаимодействия
Рис. 38. Эксперимент по асимметрии взаимодействия
С той стороны, где взаимодействие упругое (справа установлен амортизатор), опоре передается больший импульс, в результате чего, она сдвигается в данную сторону. С другой стороны (слева) тело ударяется об опору жестко, большая часть его кинетической энергии преобразуется в тепловые деформации. Положение устройства на столе, до и после взаимодействия тел с корпусом, отличается: после взаимодействия, устройство сдвигается в ту сторону, где установлен амортизатор.
Данный опыт легко повторим, в том числе, на подвесе, на плавающей платформе и т. п. В каждом случае, суммарный импульс, передаваемый корпусу данного устройства в результате взаимодействия, не равен нулю, следовательно, в аналогичной конструкции движителя, мы можем получать однонаправленный импульс периодически, причем, без видимого взаимодействия с внешней средой, то есть, с какой либо опорой. Тем не менее, взаимодействие с окружающей средой здесь также есть, поскольку этот эксперимент – один из вариантов асимметричного «энтропийного движителя», описанного ранее, и показанного на рис. 1. С одной стороны, в данном экспериментальном устройстве энтропия минимальная, здесь создается макроимпульс, передаваемый корпусу движителя через амортизаторы, как и в движителе Дина. С другой стороны, энтропия процесса взаимодействия намного больше, так как частицы вещества получают при взаимодействии, в основном, неупорядоченные импульсы, а в результате деформаций, выделяется тепловая энергия, которая передается окружающей среде.
Итак, движение может быть создано в результате асимметричного (в пространстве) энергообмена с окружающей средой. Позже, в главе о нанотехнологиях, мы вернемся к этому вопросу, показав еще один метод реализация данного принципа. Сейчас вернемся к механическим системам, использующим инерциальные свойства тела, движущегося по траектории переменного радиуса кривизны.
Эффективность таких инерциоидов может быть очень высокая, например, в 1980-е годы в Канаде и США испытывали инерционный привод по схеме Торнсона (Brandson R. Thomson), в котором эксцентрики двигаются по траектории кардиоиды. Данный привод был достаточно мощный для того, чтобы обеспечивать движение лодки с пассажирами. По энергозатратам, данный привод экономнее, чем бензиновый лодочный винтовой мотор примерно в 20 раз. Изобретение подробно описано в патенте US 4631971, от 30 декабря 1986 года.
Рассмотрим схему инерциоида Торнсона, рис. 39. Серыми кружками на схеме показано положение эксцентрика при его движении, которое создается путем суммирования двух движений: орбитального и собственного вращения. Применение пары эксцентриков позволяет устранить боковой импульс, передаваемый корпусу.
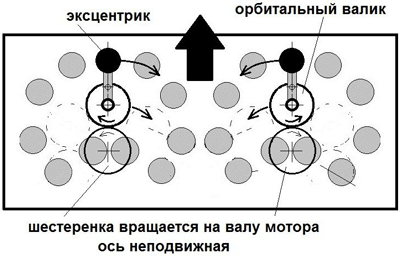 Рис. 39. Схема инерциоида Торнсона
Рис. 39. Схема инерциоида Торнсона
Орбитальный валик «обкатывает» шестеренку, которая установлена на валу мотора. Моторов может быть два, но они должны работать синхронно. Обычно, для каждого эксцентрика создают свою шестеренку привода, которую «обкатывает» орбитальный валик, но оба привода синхронизированы, поскольку имеют один общий мотор.
Экспериментальные данные, подтверждающие перспективность схемы Торнсона, были получены моим братом Фроловым Алексеем Владимировичем. При наличии интереса заказчиков к данной теме, мы готовы разработать комплект конструкторской документации для изготовления привода по схеме Торнсона.
В настоящее время, разработаны компьютерные программы для моделирования кардиоиды и конструирования инерциоидов Торнсона. На рис. 40 показан один из вариантов конструкторского решения, в котором две подвижных шестеренки обкатывают неподвижную центральную шестеренку.
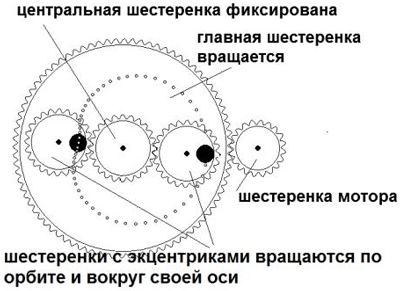 Рис. 40. Компьютерное моделирование инерциоида
Рис. 40. Компьютерное моделирование инерциоида
Итак, если траектория движения центра масс имеет форму кардиоиды, то центробежная сила, и сила реакция на корпус устройства, имеет разную величину в разных направлениях. Движущая сила обусловлена здесь, как и в других похожих схемах, градиентом центробежной силы.
В настоящее время, авторов изобретений по теме «инерциоиды» очень много. Хотелось бы рассказать про тех, кого я знал лично. Примером многолетней бескорыстной исследовательской работы в данном направлении являются проекты Константина Дмитриевича Шукалова, Иваново. В 1996 году, он приезжал в Санкт-Петербург на конференцию, и демонстрировал свои модели в работе, рис. 41.
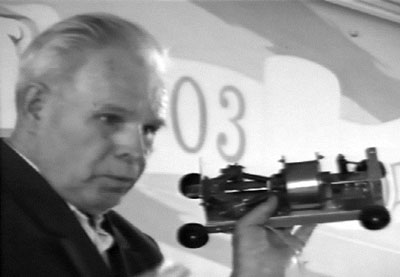 Рис. 41. Константин Дмитриевич Шукалов демонстрирует один из своих инерциоидов, 1996 год
Рис. 41. Константин Дмитриевич Шукалов демонстрирует один из своих инерциоидов, 1996 год
Одна из моделей Шукалова показана на рис. 42. В данной конструкции привода, питание на электромагнит подается по проводу. Два эксцентрика движутся по траектории постоянного радиуса, но их взаимодействие имеет особенность: в одном крайнем положении, они ударяются друг о друга, импульс «гасится». В другом крайнем положении, они ударяются о пружины, передавая корпусу два сонаправленных импульса.
 Рис. 42. Один из инерциоидов Шукалова
Рис. 42. Один из инерциоидов Шукалова
По поводу закона сохранения импульса, для рассматриваемой конструкции, необходимо отметить, что при соударении грузов, их импульс преобразуется в тепловую энергию деформации вещества, из которого сделаны движущиеся грузы. При сжатии пружин, в другой фазе рабочего цикла, энергия частично преобразуется в тепло, но большая часть кинетической энергии движущихся грузов передается корпусу движителя.
Данная схема Шукалова представляется весьма перспективной для практического внедрения.
Практическое применение таких приводов возможно не только в авиации, на судах или в космосе, но и в роли привода любой колесной техники, причем технологически устраняется система передачи крутящего момента на колеса (трансмиссия) и создается качественно новый уровень техники. Все, что требуется для внедрения данной перспективной технологии на транспорте, это интерес заказчиков и инвесторов.
Глава 9
Глава 10
Глава 11
Страховой агент из Вашингтона, Норман Л. Дин (Norman L. Dean) получил американский патент № 2,886,976 13 июля 1956 года. Устройство называется "System For Converting Rotary Motion Into Unidirectional Motion”, то есть, «система преобразования вращательного движения в однонаправленное». Второй патент взят позже, US Patent № 3,182,517 от 11 мая 1965 года «Variable Oscillator System», название означает «Система с изменяемым осциллятором».
Критики работ Нормана Дина выражают свои сомнения по поводу его результатов, так как собрав аналог его изобретения строго по описанию, взятому из патента, они не получают работоспособного движителя. Предполагается, что автор описал в тексте патента принцип в сокращенном виде, не раскрывая некоторые важные детали конструкции.
На рис. 31 показан автор данного изобретения Норман Дин, и его движитель. Это не один инерциоид, а несколько парных инерциоидов, каждый из них имеет по два встречных вращающихся эксцентрика, что позволяет устройству в целом хорошо компенсировать вибрации.
На рис. 34 показан рисунок из патента № 2,886,976, к которому добавлены названия основных деталей конструкции «движителя Дина».
Особенность конструкции «машины Дина» в том, что эксцентрики подвешены в корпусе упруго, на пружинах. Первоначально, Дин просто экспериментировал с парой эксцентриков, закрепленных на перемычке, которая, с помощью пружин, крепится к корпусу аппарата, как показано на рис. 35.
Перемычка и эксцентрики – это пара взаимодействующих тел. Их взаимодействие происходит в соответствии с законом сохранения импульса. Цикл движения эксцентриков делится на два полуцикла, создавая компенсацию силы тяжести на половине цикла. Рассмотрим цикл вращения, рис. 35: движение эксцентриков вниз вызывает реакцию опоры, начинается движение перемычки вверх. Далее, движение эксцентриков вверх вызывает реакцию опоры, которая проявляется как движение перемычки вниз. Поскольку вращение двух эксцентриков (пары) встречное, то Дину удалось компенсировать боковые колебания корпуса, а перемычка с вращающимися эксцентриками колебалась по вертикали.
Как и следовало ожидать, суммарный импульс силы, действующий на корпус данного устройства за длительный интервал времени, был равен нулю.
Далее, Дин создал «асимметрию цикла», которую мы обсуждали в схеме Толчина. В нужный момент, в конструкции включается «тормоз», рис. 36. В момент прохождения перемычки через среднее положение, она упирается в выдвижной поперечный тормоз, управляемый электромагнитом. В результате, получаются разные по величине силы взаимодействия колеблющейся вверх-вниз перемычки с корпусом.
Выбрав правильный момент торможения, можно получить однонаправленную суммарную силу, в нужном направлении. Движитель с одной парой эксцентриков работает рывками, поэтому Дин соединил шесть движителей вместе, но расположение эксцентриситета на каждом из них сдвинул на угол 60 градусов. Таким образом, он получил полный цикл 360 градусов, и более-менее равномерную однонаправленную силу тяги.
Анализируя процесс энергообмена в движителе Дина, необходимо отметить важную роль упругого взаимодействия, хотя этот аспект мало обсуждается в публикациях по данной теме. В устройстве Дина, происходит упругая передача импульса от перемычки корпусу в одну сторону (вверх), и неупругое торможение перемычки о поперечный тормоз, при движении в другую сторону. Теоретически, данная задача хорошо проработана, и относится к физике взаимодействия тел.
Известно, что столкновение тел может приводить к разным результатам: при упругом столкновении тела и корпуса устройства, в основном, корпусу передается импульс, а при неупругом столкновении (ударной деформации) большая часть импульса преобразуется в тепло. Схема эксперимента, который был мной показан аудитории конференции «Новые Идеи в Естествознании», в 1996 году, изображена на рис. 37.
Идея эксперимента довольно старая, она была опубликована, хотя и без объяснений причин данного явления, еще в 1935 году [17].
Итак, предположим, что на направляющем стержне могут скользить влево и вправо два грузика с отверстиями, например, два свинцовых цилиндра диаметром 15 мм и высотой 30 мм. Между ними расположена пружина, которая в начальный момент сжата, и удерживается в данном положении нитью. В правой части оси, был установлен резиновый амортизатор толщиной 5 мм.
На рис. 38 показаны три последовательных кадра из видеозаписи данного эксперимента, который проводился на полированном столе в аудитории конференции «Новые идеи в естествознании», 1996 год. Суть эксперимента состоит в следующем: нить, которая удерживает пружину в сжатом состоянии, разрушают каким-либо образом, например, пережигают. Тела, оттолкнувшись друг от друга в центральной точке корпуса, скользят в разные стороны, и каждое из них, по-разному, взаимодействует с опорой в конце своего пути.
С той стороны, где взаимодействие упругое (справа установлен амортизатор), опоре передается больший импульс, в результате чего, она сдвигается в данную сторону. С другой стороны (слева) тело ударяется об опору жестко, большая часть его кинетической энергии преобразуется в тепловые деформации. Положение устройства на столе, до и после взаимодействия тел с корпусом, отличается: после взаимодействия, устройство сдвигается в ту сторону, где установлен амортизатор.
Данный опыт легко повторим, в том числе, на подвесе, на плавающей платформе и т. п. В каждом случае, суммарный импульс, передаваемый корпусу данного устройства в результате взаимодействия, не равен нулю, следовательно, в аналогичной конструкции движителя, мы можем получать однонаправленный импульс периодически, причем, без видимого взаимодействия с внешней средой, то есть, с какой либо опорой. Тем не менее, взаимодействие с окружающей средой здесь также есть, поскольку этот эксперимент – один из вариантов асимметричного «энтропийного движителя», описанного ранее, и показанного на рис. 1. С одной стороны, в данном экспериментальном устройстве энтропия минимальная, здесь создается макроимпульс, передаваемый корпусу движителя через амортизаторы, как и в движителе Дина. С другой стороны, энтропия процесса взаимодействия намного больше, так как частицы вещества получают при взаимодействии, в основном, неупорядоченные импульсы, а в результате деформаций, выделяется тепловая энергия, которая передается окружающей среде.
Итак, движение может быть создано в результате асимметричного (в пространстве) энергообмена с окружающей средой. Позже, в главе о нанотехнологиях, мы вернемся к этому вопросу, показав еще один метод реализация данного принципа. Сейчас вернемся к механическим системам, использующим инерциальные свойства тела, движущегося по траектории переменного радиуса кривизны.
Эффективность таких инерциоидов может быть очень высокая, например, в 1980-е годы в Канаде и США испытывали инерционный привод по схеме Торнсона (Brandson R. Thomson), в котором эксцентрики двигаются по траектории кардиоиды. Данный привод был достаточно мощный для того, чтобы обеспечивать движение лодки с пассажирами. По энергозатратам, данный привод экономнее, чем бензиновый лодочный винтовой мотор примерно в 20 раз. Изобретение подробно описано в патенте US 4631971, от 30 декабря 1986 года.
Рассмотрим схему инерциоида Торнсона, рис. 39. Серыми кружками на схеме показано положение эксцентрика при его движении, которое создается путем суммирования двух движений: орбитального и собственного вращения. Применение пары эксцентриков позволяет устранить боковой импульс, передаваемый корпусу.
Орбитальный валик «обкатывает» шестеренку, которая установлена на валу мотора. Моторов может быть два, но они должны работать синхронно. Обычно, для каждого эксцентрика создают свою шестеренку привода, которую «обкатывает» орбитальный валик, но оба привода синхронизированы, поскольку имеют один общий мотор.
Экспериментальные данные, подтверждающие перспективность схемы Торнсона, были получены моим братом Фроловым Алексеем Владимировичем. При наличии интереса заказчиков к данной теме, мы готовы разработать комплект конструкторской документации для изготовления привода по схеме Торнсона.
В настоящее время, разработаны компьютерные программы для моделирования кардиоиды и конструирования инерциоидов Торнсона. На рис. 40 показан один из вариантов конструкторского решения, в котором две подвижных шестеренки обкатывают неподвижную центральную шестеренку.
Итак, если траектория движения центра масс имеет форму кардиоиды, то центробежная сила, и сила реакция на корпус устройства, имеет разную величину в разных направлениях. Движущая сила обусловлена здесь, как и в других похожих схемах, градиентом центробежной силы.
В настоящее время, авторов изобретений по теме «инерциоиды» очень много. Хотелось бы рассказать про тех, кого я знал лично. Примером многолетней бескорыстной исследовательской работы в данном направлении являются проекты Константина Дмитриевича Шукалова, Иваново. В 1996 году, он приезжал в Санкт-Петербург на конференцию, и демонстрировал свои модели в работе, рис. 41.
Одна из моделей Шукалова показана на рис. 42. В данной конструкции привода, питание на электромагнит подается по проводу. Два эксцентрика движутся по траектории постоянного радиуса, но их взаимодействие имеет особенность: в одном крайнем положении, они ударяются друг о друга, импульс «гасится». В другом крайнем положении, они ударяются о пружины, передавая корпусу два сонаправленных импульса.
По поводу закона сохранения импульса, для рассматриваемой конструкции, необходимо отметить, что при соударении грузов, их импульс преобразуется в тепловую энергию деформации вещества, из которого сделаны движущиеся грузы. При сжатии пружин, в другой фазе рабочего цикла, энергия частично преобразуется в тепло, но большая часть кинетической энергии движущихся грузов передается корпусу движителя.
Данная схема Шукалова представляется весьма перспективной для практического внедрения.
Практическое применение таких приводов возможно не только в авиации, на судах или в космосе, но и в роли привода любой колесной техники, причем технологически устраняется система передачи крутящего момента на колеса (трансмиссия) и создается качественно новый уровень техники. Все, что требуется для внедрения данной перспективной технологии на транспорте, это интерес заказчиков и инвесторов.
Глава 9
Прецессия гироскопа
Отдельно можно выделить тип инерциальных движителей, которые используют эффекты, возникающие при вынужденной прецессии гироскопа. Напомню, что метод Полякова есть частный случай практического использования данного явления.
Суть эффекта, в классическом понимании: гироскоп стремится сохранять момент вращения, и любой поворот оси его вращения (вынужденная прецессия) создает пару сил, то есть, дополнительный крутящий момент, компенсирующий данный поворот. На рис. 43 показана векторная суперпозиция сил, возникающая при вынужденной прецессии оси гироскопа.
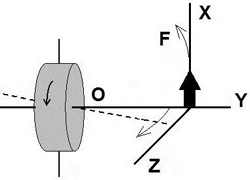 Рис. 43. Силы, возникающие при вынужденной прецессии оси гироскопа
Рис. 43. Силы, возникающие при вынужденной прецессии оси гироскопа
Возникающая сила F настолько мощная, что способна поворачивать человека, сидящего на вращающемся табурете – «скамейке Жуковского», если у него в руках небольшой, но быстро вращающийся гироскоп. Важная особенность: сила F не линейная, она создает поворот оси вращения гироскопа в плоскости XOY, если на ось действует внешняя сила, поворачивающая ее в плоскости ZOY. Другая особенность – эффект увеличивается, если гироскоп вращается быстрее, и поворот оси в плоскости ZOY происходит быстрее.
Согласитесь, что данная ситуация чем-то напоминает возникновение силы Лоренца, или силы Магнуса. Попробуем найти аналогии и причины возникновения данной силы, в рамках эфиродинамики. На рис. 44 показан гироскоп, который вращается вокруг оси Y, и поворачивается в плоскости YOZ.
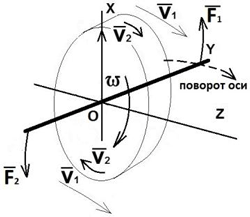 Рис. 44. Векторное сложение скоростей в верхней и нижней части гироскопа
Рис. 44. Векторное сложение скоростей в верхней и нижней части гироскопа
Возникает пара гироскопических сил: F1 направлена вверх, и F2 – вниз, в плоскости XOY, с точки зрения наблюдателя, который видит вращение гироскопа вокруг оси Y по часовой стрелке (правое вращение). Какие могут быть причины появления данной пары сил?
Отметим следующий факт: разные части прецессирующего гироскопа движутся с различной скоростью относительно внешней среды. Скорость движения частиц верхней части гироскопа, относительно внешней среды, за счет сложения сонаправленных векторов скоростей V1и V2, больше, чем скорость движения частиц нижней части гироскопа, относительно среды. В результате, как и в газодинамике, в соответствии с законом Бернулли, давление внешней среды на частицы материи в разных частях гироскопа не одинаковое, то есть, возникает градиент давления среды на прецессирующий гироскоп. Эффект проявляется как в воздухе, так и в вакууме, поэтому у нас есть повод говорить о эфиродинамическом давлении внешней среды на частицы материи гироскопа.
Таким образом, пару гироскопических сил можно обосновать градиентом давления эфира на вращающиеся частицы материи гироскопа. Следовательно, это внешняя сила, и мы можем использовать ее в конструкциях движителей активного типа. При конструировании следует учесть, что это сила не сдвигает гироскоп линейно, а поворачивает его ось в плоскости XOY, увеличивая крутящий момент гироскопа.
Дополнительно, рассмотрим вопрос с другой стороны. На рис. 45 показана траектории движения точки на периферии вращающегося гироскопа, при его прецессии (повороте оси вращения).
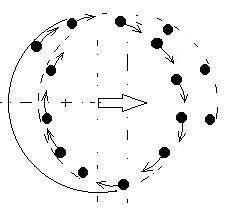 Рис. 45. Траектория точки на прецессирующем гироскопе
Рис. 45. Траектория точки на прецессирующем гироскопе
Расстояние от данной точки до центра вращения гироскопа постоянное, но с учетом того, что сам центр вращения гироскопа (при вынужденной прецессии) движется, то такая траектория движения точки в пространстве уже не является окружностью. Очевидно, что кривизна разных участков данной траектории не является постоянной, поэтому скорость движения и ускорение криволинейного движения также не является постоянным.
Этот принцип мы рассматривали ранее, например, в экспериментах А.И. Вейник, рис. 15. Центробежная сила, действующая на тело при его ускоренном криволинейном движении, зависит от величины ускорения, и, в данном случае, она также не является одинаковой на разных участках траектории.
Таким образом, возникает градиент силы, преимущественно в одном направлении. Пример практического применения данного метода показан на рис. 46, патент США 3,653,269 от 15 мая 1970 года, автор Ричард Фостер (Richard Foster).
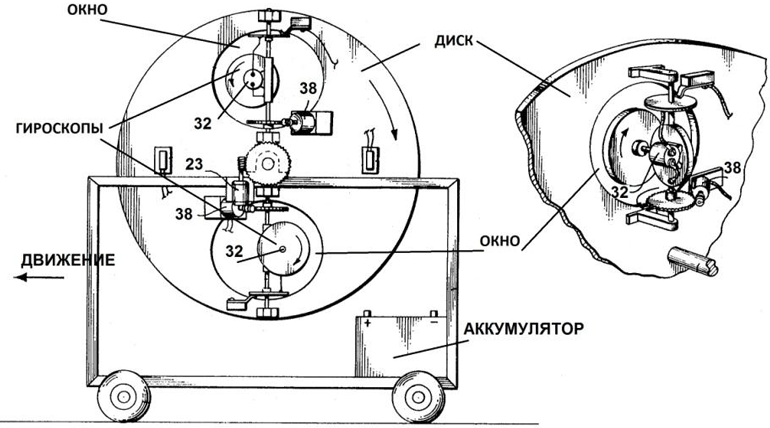 Рис. 46. Движитель с гироскопами, автор Ричард Фостер
Рис. 46. Движитель с гироскопами, автор Ричард Фостер
В описании патента, показана конструкция в виде тележки, на которой вращается диск, и на диске установлены два гироскопа, в окнах (отверстиях). В конструкции есть электромоторы трех групп, различных по назначению: два мотора 32 вращают сами гироскопы, причем, питание на них подаются через щетки и два контактных диска. Моторы 32 сами тоже вращаются приводами 38, создающими прецессию гироскопов. Гироскопы закреплены на оси вращения, которая расположена диаметрально в окне диска. Мотор 23 поворачивает весь диск, что и создает реакцию на весь корпус. При одной половине цикла силу тяги создает один гироскоп, потом он выключается, а силу тяги создает второй гироскоп. Каждый из гироскопов «работает» половину цикла.
Существует много аналогичных схем, в том числе, запатентованных. Практические исследования можно проводить даже в небольшой домашней лаборатории, однако, следует знать важный аспект применения подобных технологий: возникающие при работе инерциального движителя реакции в эфире могут отрицательно влиять на здоровье человека, находящегося рядом с такими движителями. По своему опыту, могу отметить, например, изменение артериального давления. Из общения с другими авторами – разработчиками, которые рискнули заниматься более мощными возмущениями эфирной среды, могу привести следующие факты: в 1980 – 1990-е годы, в Санкт-Петербурге, проводились эксперименты с металлическим гироскопом в форме цилиндра, имеющего соотношение длины и диаметра 2 к 1, массу – несколько килограмм, обороты – тысячи оборотов в минуту. Раскрутив такой гироскоп, исследователи резко поворачивали (наклоняли) ось его вращения, с помощью мощного рычага. При такой «вынужденной прецессии», возникала не только пара гироскопических сил… Было отмечено «импульсное излучение неизвестной природы», которое, в одном из экспериментов, привело в неисправное состояние все механические и электромеханические часы в здании, где проводился данный эксперимент. Кроме того, отмечалось негативное влияние данного вида излучения на здоровье людей, находящихся вблизи экспериментальной установки. Для нас эти заявления интересны тем, что подтверждают предположение о природе гироскопических сил, как реакции эфирной среды на ее возмущение. Согласно рассматриваемой в данной книге эфиродинамической концепции, такое возмущение должно сопровождаться мощной волной плотности эфирной среды, влияющей не только на технические устройства, но и на биологические объекты.
В перспективе, представляется возможным создавать, при помощи инерциоидов, импульсные возмущения эфирной среды, причем, строго в определенном направлении, и конструировать так называемые «эфирообменные движители». Полагаю, что в роли движителей, такие механические машины не очень перспективны, но могут иметь шанс внедрения, как системы связи и вооружения нового типа. Быстродействующие мощные движители данного типа могут быть реализованы не механическим путем, а на основе гироскопических свойств частиц материи, как показал С.М. Поляков на примере ферромагнетиков.
Суть эффекта, в классическом понимании: гироскоп стремится сохранять момент вращения, и любой поворот оси его вращения (вынужденная прецессия) создает пару сил, то есть, дополнительный крутящий момент, компенсирующий данный поворот. На рис. 43 показана векторная суперпозиция сил, возникающая при вынужденной прецессии оси гироскопа.
Возникающая сила F настолько мощная, что способна поворачивать человека, сидящего на вращающемся табурете – «скамейке Жуковского», если у него в руках небольшой, но быстро вращающийся гироскоп. Важная особенность: сила F не линейная, она создает поворот оси вращения гироскопа в плоскости XOY, если на ось действует внешняя сила, поворачивающая ее в плоскости ZOY. Другая особенность – эффект увеличивается, если гироскоп вращается быстрее, и поворот оси в плоскости ZOY происходит быстрее.
Согласитесь, что данная ситуация чем-то напоминает возникновение силы Лоренца, или силы Магнуса. Попробуем найти аналогии и причины возникновения данной силы, в рамках эфиродинамики. На рис. 44 показан гироскоп, который вращается вокруг оси Y, и поворачивается в плоскости YOZ.
Возникает пара гироскопических сил: F1 направлена вверх, и F2 – вниз, в плоскости XOY, с точки зрения наблюдателя, который видит вращение гироскопа вокруг оси Y по часовой стрелке (правое вращение). Какие могут быть причины появления данной пары сил?
Отметим следующий факт: разные части прецессирующего гироскопа движутся с различной скоростью относительно внешней среды. Скорость движения частиц верхней части гироскопа, относительно внешней среды, за счет сложения сонаправленных векторов скоростей V1и V2, больше, чем скорость движения частиц нижней части гироскопа, относительно среды. В результате, как и в газодинамике, в соответствии с законом Бернулли, давление внешней среды на частицы материи в разных частях гироскопа не одинаковое, то есть, возникает градиент давления среды на прецессирующий гироскоп. Эффект проявляется как в воздухе, так и в вакууме, поэтому у нас есть повод говорить о эфиродинамическом давлении внешней среды на частицы материи гироскопа.
Таким образом, пару гироскопических сил можно обосновать градиентом давления эфира на вращающиеся частицы материи гироскопа. Следовательно, это внешняя сила, и мы можем использовать ее в конструкциях движителей активного типа. При конструировании следует учесть, что это сила не сдвигает гироскоп линейно, а поворачивает его ось в плоскости XOY, увеличивая крутящий момент гироскопа.
Дополнительно, рассмотрим вопрос с другой стороны. На рис. 45 показана траектории движения точки на периферии вращающегося гироскопа, при его прецессии (повороте оси вращения).
Расстояние от данной точки до центра вращения гироскопа постоянное, но с учетом того, что сам центр вращения гироскопа (при вынужденной прецессии) движется, то такая траектория движения точки в пространстве уже не является окружностью. Очевидно, что кривизна разных участков данной траектории не является постоянной, поэтому скорость движения и ускорение криволинейного движения также не является постоянным.
Этот принцип мы рассматривали ранее, например, в экспериментах А.И. Вейник, рис. 15. Центробежная сила, действующая на тело при его ускоренном криволинейном движении, зависит от величины ускорения, и, в данном случае, она также не является одинаковой на разных участках траектории.
Таким образом, возникает градиент силы, преимущественно в одном направлении. Пример практического применения данного метода показан на рис. 46, патент США 3,653,269 от 15 мая 1970 года, автор Ричард Фостер (Richard Foster).
В описании патента, показана конструкция в виде тележки, на которой вращается диск, и на диске установлены два гироскопа, в окнах (отверстиях). В конструкции есть электромоторы трех групп, различных по назначению: два мотора 32 вращают сами гироскопы, причем, питание на них подаются через щетки и два контактных диска. Моторы 32 сами тоже вращаются приводами 38, создающими прецессию гироскопов. Гироскопы закреплены на оси вращения, которая расположена диаметрально в окне диска. Мотор 23 поворачивает весь диск, что и создает реакцию на весь корпус. При одной половине цикла силу тяги создает один гироскоп, потом он выключается, а силу тяги создает второй гироскоп. Каждый из гироскопов «работает» половину цикла.
Существует много аналогичных схем, в том числе, запатентованных. Практические исследования можно проводить даже в небольшой домашней лаборатории, однако, следует знать важный аспект применения подобных технологий: возникающие при работе инерциального движителя реакции в эфире могут отрицательно влиять на здоровье человека, находящегося рядом с такими движителями. По своему опыту, могу отметить, например, изменение артериального давления. Из общения с другими авторами – разработчиками, которые рискнули заниматься более мощными возмущениями эфирной среды, могу привести следующие факты: в 1980 – 1990-е годы, в Санкт-Петербурге, проводились эксперименты с металлическим гироскопом в форме цилиндра, имеющего соотношение длины и диаметра 2 к 1, массу – несколько килограмм, обороты – тысячи оборотов в минуту. Раскрутив такой гироскоп, исследователи резко поворачивали (наклоняли) ось его вращения, с помощью мощного рычага. При такой «вынужденной прецессии», возникала не только пара гироскопических сил… Было отмечено «импульсное излучение неизвестной природы», которое, в одном из экспериментов, привело в неисправное состояние все механические и электромеханические часы в здании, где проводился данный эксперимент. Кроме того, отмечалось негативное влияние данного вида излучения на здоровье людей, находящихся вблизи экспериментальной установки. Для нас эти заявления интересны тем, что подтверждают предположение о природе гироскопических сил, как реакции эфирной среды на ее возмущение. Согласно рассматриваемой в данной книге эфиродинамической концепции, такое возмущение должно сопровождаться мощной волной плотности эфирной среды, влияющей не только на технические устройства, но и на биологические объекты.
В перспективе, представляется возможным создавать, при помощи инерциоидов, импульсные возмущения эфирной среды, причем, строго в определенном направлении, и конструировать так называемые «эфирообменные движители». Полагаю, что в роли движителей, такие механические машины не очень перспективны, но могут иметь шанс внедрения, как системы связи и вооружения нового типа. Быстродействующие мощные движители данного типа могут быть реализованы не механическим путем, а на основе гироскопических свойств частиц материи, как показал С.М. Поляков на примере ферромагнетиков.
Глава 10
ГИБИП
Перейдем к историческому примеру в области создания эфирообменных аппаратов. Этот пример имеет важное значение, для понимания путей развития новых технологий движения в пространстве.
В 1991 году, группа авторов ГИБИП (Группа Изучения БезИнерционных Процессов), развивая теорию А.В. Мурлыкина, проверяла технические решения, которые могут применяться для создания работоспособных устройств, позволяющих получать движущую силу за счет реакции с эфирной средой.
В основе теории Мурлыкина лежит понимание различий двух способов создания движения в пространстве: активного и пассивного. В одном случае, окружающая среда рассматривается как пассивная, а движитель должен быть активный, то есть, создавать силу тяги, преодолевая сопротивление (инерцию) среды. В другом случае, как и для простого парусника, инициатива перемещения происходит от окружающей среды. Она становится активной, перемещая объект, в том числе, летательный аппарат, без затрат топлива. По терминологии разработчиков ГИБИП, эфир является «антивеществом», поскольку из него и создается вещество. Процесс существования частиц материи, имеющих инерциальные свойства, и есть эфирообменный процесс.
Схема работы эфирообменного движителя описана авторами следующим образом: необходимо обеспечить «выделение из ядра химического элемента антивещественной составляющей, накопление и увеличение ее плотности, а затем – передать ее в рабочую зону аппарата. Наличие вокруг летательного аппарата «антивещественной оболочки» высокой плотности будет переводить окружающую среду в активное состояние, и она будет стремиться «вытеснить» такой объект куда угодно, в направлении уменьшения плотности в данном секторе оболочки».
На рис. 47 показана копия документа, который мне предоставил один из членов группы ГИБИП.
 Рис. 47. Аффидитив Михалева
Рис. 47. Аффидитив Михалева
Данный документ (Аффидитив – заявление под присягой), был опубликован в журнале «Новая Энергетика», № 1 (4) Январь – Февраль 2002 года.
Другими словами, движителем данного эфирообменного аппарата, служит эфирная оболочка вокруг летательного аппарата, имеющая градиент плотности эфира в нужном направлении. Окружающая среда будет вытеснять область пространства, окруженную такой эфирной оболочкой в сторону уменьшенной плотности эфирной оболочки.
«Эфирное вещество», по словам разработчиков ГИБИП, «отбирается от ядер атомов». Предполагаю, что основой их концепции является эфиродинамическая модель ядер, существующих за счет постоянного притока «эфирного вещества». Более подробно, технология не раскрывается.
При моем общении с членом данной группы Щербак П.В., мы обсуждали такую сложность внедрения данной технологии, как медико-биологический аспект. Данный разработчик имеет ряд публикаций [18].
В 1991 году, группа авторов ГИБИП (Группа Изучения БезИнерционных Процессов), развивая теорию А.В. Мурлыкина, проверяла технические решения, которые могут применяться для создания работоспособных устройств, позволяющих получать движущую силу за счет реакции с эфирной средой.
В основе теории Мурлыкина лежит понимание различий двух способов создания движения в пространстве: активного и пассивного. В одном случае, окружающая среда рассматривается как пассивная, а движитель должен быть активный, то есть, создавать силу тяги, преодолевая сопротивление (инерцию) среды. В другом случае, как и для простого парусника, инициатива перемещения происходит от окружающей среды. Она становится активной, перемещая объект, в том числе, летательный аппарат, без затрат топлива. По терминологии разработчиков ГИБИП, эфир является «антивеществом», поскольку из него и создается вещество. Процесс существования частиц материи, имеющих инерциальные свойства, и есть эфирообменный процесс.
Схема работы эфирообменного движителя описана авторами следующим образом: необходимо обеспечить «выделение из ядра химического элемента антивещественной составляющей, накопление и увеличение ее плотности, а затем – передать ее в рабочую зону аппарата. Наличие вокруг летательного аппарата «антивещественной оболочки» высокой плотности будет переводить окружающую среду в активное состояние, и она будет стремиться «вытеснить» такой объект куда угодно, в направлении уменьшения плотности в данном секторе оболочки».
На рис. 47 показана копия документа, который мне предоставил один из членов группы ГИБИП.
Данный документ (Аффидитив – заявление под присягой), был опубликован в журнале «Новая Энергетика», № 1 (4) Январь – Февраль 2002 года.
Другими словами, движителем данного эфирообменного аппарата, служит эфирная оболочка вокруг летательного аппарата, имеющая градиент плотности эфира в нужном направлении. Окружающая среда будет вытеснять область пространства, окруженную такой эфирной оболочкой в сторону уменьшенной плотности эфирной оболочки.
«Эфирное вещество», по словам разработчиков ГИБИП, «отбирается от ядер атомов». Предполагаю, что основой их концепции является эфиродинамическая модель ядер, существующих за счет постоянного притока «эфирного вещества». Более подробно, технология не раскрывается.
При моем общении с членом данной группы Щербак П.В., мы обсуждали такую сложность внедрения данной технологии, как медико-биологический аспект. Данный разработчик имеет ряд публикаций [18].
Глава 11
Эфироплавательный аппарат Коровина
Отметим, что создание летательных аппаратов, движимых самой эфирной средой, а не реактивными топливными системами, занимались еще до 1917 года. Интересный пример из архивов прошлого века – эфироплавательный аппарат Ивана Федоровича Коровина.
Иван Федорович Коровин был сыном состоятельного купца, получил высшее образование в Политехническом институте Франции, по специальности «материаловедение». В 1889 году он вернулся в Россию, и работал, в основном, на оборонную промышленность: разработал бронежилет – «вязкую броню Коровина», новую пушечную сталь, внедрял в практику дюралюминий и титан. После смерти отца, Коровин уволился со службы, продал семейное предприятие, и целиком посвятил жизнь созданию аппарата, способного «совершить полет к Луне».
Коровин был противником реактивного движителя, и писал Циолковскому еще в 1903 году: «Ваши расчеты убеждают, что это не двигатель, а мот, обжора, самоед! Девять десятых веса снаряда отдавать топливу? А ведь еще желательно было бы и вернуться с Луны! Нет, ваш металлический аэростат привлекает меня куда больше!»
Сегодня его идея звучит фантастикой: Коровин задумал построить аналог дирижабля, но для того, чтобы данный аппарат мог летать не только в воздухе, но и в космосе, Коровин планировал заполнить его «горячим эфиром», то есть, такой средой, которая имеет плотность меньше, чем плотность «мирового эфира». Затем, он увлекся идеей изучения природы магнитных сил, и решил использовать для движителя своего космического аппарата «многополюсные магниты».
В связи с этим, Коровин писал Циолковскому в марте 1907 года: «Беда только, что мы очень плохо знакомы с магнитной энергией. Считать, что существует только два полюса, – все равно что считать, будто в мире всего два цвета: черный и белый. Ничего удивительного – мы лишь на пороге великих открытий…»
Многополюсные магниты – революционная идея, для того времени. Применение таких магнитов требует понимание сути магнитных полей, как «потоков эфирного ветра». С другой стороны, современная физика рассматривает магнитные поля постоянных магнитов, как результат согласованной ориентации магнитных моментов элементарных частиц, не детализируя тот факт, что магнитный момент частицы есть просто форма описания ее инерциальных гироскопических свойств, которые обусловлены ее эфиродинамическими процессами. Отсюда, мы можем предложить пути создания новых специальных материалов.
Иван Федорович основал свою лабораторию и опытное производство, купив хутор Степной в Воронежской области. Для экспериментальной работы он имел материалы со всего света, включая метеоритное железо и редкоземельные металлы с Камчатки. В его новом имении была построена электростанция, а также, электрическая печь для плавки металлов. Рабочие были приглашены с Урала и Санкт-Петербурга.
В августе 1917 года, Коровин разослал приглашения своим друзьям и журналистам на демонстрацию его летательного аппарата. Среди приглашенных были военные, журналисты, друзья Коровина, в том числе, Граф Алексей Николаевич Толстой и Константин Эдуардович Циолковский. Прочитать об этом историческом событии мы сегодня можем благодаря воронежскому журналисту Драгунову [19]: «Господин Коровин объясняет устройство своего аппарата. Похожий на небольшой дирижабль, он выполнен, однако, целиком из металла, секрет которого господин Коровин собирается вскоре передать новому российскому государству на безвозмездных условиях. Металл этот является магнитным, но отталкивается и притягивается к самым разнообразным предметам и даже к пустоте, которая, по словам господина Коровина, сама является особого рода магнитом. Управляя магнитными рулями и парусами, можно заставить аппарат двигаться в нужном направлении – вверх, вниз, в любую из сторон света, при этом не требуется ни угля, ни дров, ни бензина! Аппарат подобен паруснику, для которого всегда есть попутный ветер».
Иван Федорович Коровин был сыном состоятельного купца, получил высшее образование в Политехническом институте Франции, по специальности «материаловедение». В 1889 году он вернулся в Россию, и работал, в основном, на оборонную промышленность: разработал бронежилет – «вязкую броню Коровина», новую пушечную сталь, внедрял в практику дюралюминий и титан. После смерти отца, Коровин уволился со службы, продал семейное предприятие, и целиком посвятил жизнь созданию аппарата, способного «совершить полет к Луне».
Коровин был противником реактивного движителя, и писал Циолковскому еще в 1903 году: «Ваши расчеты убеждают, что это не двигатель, а мот, обжора, самоед! Девять десятых веса снаряда отдавать топливу? А ведь еще желательно было бы и вернуться с Луны! Нет, ваш металлический аэростат привлекает меня куда больше!»
Сегодня его идея звучит фантастикой: Коровин задумал построить аналог дирижабля, но для того, чтобы данный аппарат мог летать не только в воздухе, но и в космосе, Коровин планировал заполнить его «горячим эфиром», то есть, такой средой, которая имеет плотность меньше, чем плотность «мирового эфира». Затем, он увлекся идеей изучения природы магнитных сил, и решил использовать для движителя своего космического аппарата «многополюсные магниты».
В связи с этим, Коровин писал Циолковскому в марте 1907 года: «Беда только, что мы очень плохо знакомы с магнитной энергией. Считать, что существует только два полюса, – все равно что считать, будто в мире всего два цвета: черный и белый. Ничего удивительного – мы лишь на пороге великих открытий…»
Многополюсные магниты – революционная идея, для того времени. Применение таких магнитов требует понимание сути магнитных полей, как «потоков эфирного ветра». С другой стороны, современная физика рассматривает магнитные поля постоянных магнитов, как результат согласованной ориентации магнитных моментов элементарных частиц, не детализируя тот факт, что магнитный момент частицы есть просто форма описания ее инерциальных гироскопических свойств, которые обусловлены ее эфиродинамическими процессами. Отсюда, мы можем предложить пути создания новых специальных материалов.
Иван Федорович основал свою лабораторию и опытное производство, купив хутор Степной в Воронежской области. Для экспериментальной работы он имел материалы со всего света, включая метеоритное железо и редкоземельные металлы с Камчатки. В его новом имении была построена электростанция, а также, электрическая печь для плавки металлов. Рабочие были приглашены с Урала и Санкт-Петербурга.
В августе 1917 года, Коровин разослал приглашения своим друзьям и журналистам на демонстрацию его летательного аппарата. Среди приглашенных были военные, журналисты, друзья Коровина, в том числе, Граф Алексей Николаевич Толстой и Константин Эдуардович Циолковский. Прочитать об этом историческом событии мы сегодня можем благодаря воронежскому журналисту Драгунову [19]: «Господин Коровин объясняет устройство своего аппарата. Похожий на небольшой дирижабль, он выполнен, однако, целиком из металла, секрет которого господин Коровин собирается вскоре передать новому российскому государству на безвозмездных условиях. Металл этот является магнитным, но отталкивается и притягивается к самым разнообразным предметам и даже к пустоте, которая, по словам господина Коровина, сама является особого рода магнитом. Управляя магнитными рулями и парусами, можно заставить аппарат двигаться в нужном направлении – вверх, вниз, в любую из сторон света, при этом не требуется ни угля, ни дров, ни бензина! Аппарат подобен паруснику, для которого всегда есть попутный ветер».