Страница:
dt nt!_ktrap_frame.Программное прерывание ядро обслуживает либо при обработке аппаратного прерывания, либо синхронно - при вызове потоком функции ядра, относящейся к данному программному прерыванию.
B большинстве случаев ядро устанавливает функции, выполняющие общую обработку ловушек до и после передачи управления другим функциям, которые ставят ловушки. Например, когда устройство генерирует прерывание, обработчик ловушек аппаратных прерываний (принадлежащий ядру) передает управление процедуре обслуживания прерывания(interrupt service routine, ISR), предоставленной драйвером соответствующего устройства. Если прерывание возникло в результате вызова системного сервиса, обработчик ловушек общесистемных сервисов передает управление функции указанного системного сервиса в исполнительной системе. Ядро также устанавливает обработчики для ловушек, которые оно не ожидает или не обрабатывает. Эти обработчики, как правило, выполняют системную функцию KeBugCheckEx.Она останавливает компьютер, если ядро обнаруживает в работе системы отклонения, способные привести к повреждению данных (подробнее об этом см. главу 14). Диспетчеризация прерываний, исключений и системных сервисов детальнее описывается в следующих разделах.
Аппаратные прерывания обычно генерируются устройствами ввода-вывода, которые таким образом уведомляют процессор о необходимости уделить им внимание. Устройства, управляемые на основе прерываний, позволяют операционной системе максимально полно использовать процессор, совмещая основную обработку с обслуживанием ввода-вывода. Выдав запрос на ввод-вывод, поток может заняться другой работой, пока устройство выполняет запрошенную операцию. Закончив, устройство генерирует прерывание, и процессор переключается на обслуживание этого устройства. Прерываниями управляются, как правило, координатные устройства, принтеры, клавиатуры, дисковые устройства и сетевые платы.
Системное программное обеспечение также может генерировать прерывания. Ядро способно отключать прерывания, чтобы не прерывать работу процессора, однако это делается нечасто - только в критические моменты, например при обработке прерываний или диспетчеризации исключения.
Для обработки аппаратных прерываний ядро устанавливает обработчики ловушек прерываний, которые передают управление внешней процедуре (ISR), обрабатывающей прерывание, или внутренней процедуре ядра, реагирующей на прерывание. Драйверы устройств предоставляют ISR для обслуживания прерываний от своих устройств, а ядро - внутренние процедуры для обработки других типов прерываний.
Далее мы рассмотрим, как процессор уведомляется об аппаратных прерываниях, какие типы прерываний поддерживаются ядром и как драйверы устройств взаимодействуют с ядром (в процессе обработки прерываний). Кроме того, мы поговорим о распознавании ядром программных прерываний и об объектах, используемых для реализации таких прерываний.
Ha аппаратных платформах, поддерживаемых Windows, прерывания, связанные с внешним вводом-выводом, поступают по одной из линий контроллера прерываний. Контроллер в свою очередь связан с процессором единственной линией, по которой и уведомляет о прерывании. Как только процессор прерывается, он требует от контроллера запрос прерывания (interrupt request, IRQ). Контроллер транслирует IRQ в номер прерывания, используемый как индекс в структуре, называемой таблицей диспетчеризации прерываний(interrupt dispatch table, IDT), и передает управление соответствующей процедуре. При загрузке Windows заносит в IDT указатели на процедуры ядра, обрабатывающие каждое прерывание и исключение.
ЭКСПЕРИМЕНТ: просмотр IDT
Просмотреть содержимое IDT, включая сведения об обработчиках ловушек, которые Windows назначила прерываниям, можно с помощью команды !idtотладчика ядра. Команда !idtбез флагов показывает векторы, которые сопоставлены с адресами в модулях, отличных от Ntoskrnl.exe.
Ниже показано, что выводит команда !idt.
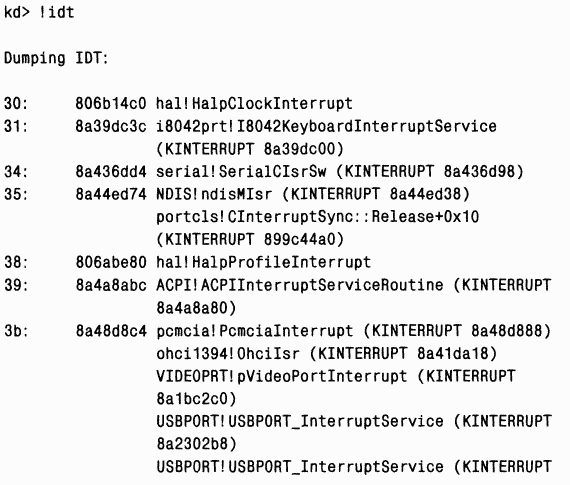
 B системе, задействованной в этом эксперименте, номер прерывания 0x3C - с ISR драйвера клавиатуры (I8042prt.sys), а прерывание 0x3B совместно используется несколькими устройствами, в том числе видеоадаптером, шиной PCMCIA, портами USB и IEEE 1394, а также сетевым адаптером.
B системе, задействованной в этом эксперименте, номер прерывания 0x3C - с ISR драйвера клавиатуры (I8042prt.sys), а прерывание 0x3B совместно используется несколькими устройствами, в том числе видеоадаптером, шиной PCMCIA, портами USB и IEEE 1394, а также сетевым адаптером.
Windows увязывает аппаратные IRQ с номерами прерываний в IDT. Эта таблица используется системой и при конфигурировании обработчиков ловушек для исключений. Так, номер исключения для ошибки страницы на x86 и x64 (это исключение возникает, когда поток пытается получить доступ к отсутствующей или не определенной в виртуальной памяти странице) равен 0xe. Следовательно, запись 0xe в IDT указывает на системный обработчик ошибок страниц. Хотя архитектуры, поддерживаемые Windows, допус-каютдо 256 элементов в IDT, число IRQ на конкретной машине определяется архитектурой используемого в ней контроллера прерываний.
У каждого процессора имеется своя IDT, так что разные процессоры могут при необходимости выполнять разные ISR. Например, в многопроцессорной системе каждый процессор получает прерывания системного таймера, но обновление значения системного таймера в результате обработки этого прерывания осуществляется только одним процессором. Однако все процессоры используют это прерывание для измерения кванта времени, выделенного потоку, и для инициации новой процедуры планирования по истечении этого кванта. Аналогичным образом в некоторых конфигурациях может понадобиться, чтобы определенные аппаратные прерывания обрабатывал конкретный процессор.
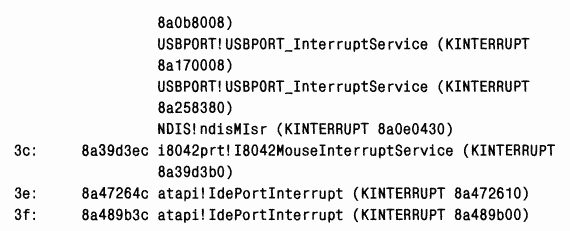
B большинстве систем x86 применяется либо программируемый контроллер прерываний (Programmable Interrupt Controller, PIC) i8259A, либо его разновидность, усовершенствованный программируемый контроллер прерываний (Advanced Programmable Interrupt Controller, APIC) i82489. Новые компьютеры, как правило, оснащаются APIC Стандарт PIC был разработан для оригинальных IBM PC PIC работает только в однопроцессорных системах и имеет 15 линий прерываний. APIC и SAPIC (о нем чуть позже) способен работать в многопроцессорных системах и предлагает 256 линий прерываний. Intel совместно с другими компаниями создали спецификацию Multiprocessor (MP) Specification, стандарт для многопроцессорных систем x86, основанный на использовании APIC Для совместимости с однопроцессорными операционными системами и загрузочным кодом, запускающим многопроцессорную систему в однопроцессорном режиме, APIC поддерживает PIC-совместимый режим с 15 линиями прерываний и передачей прерываний лишь главному процессору. Архитектура APIC показана на рис. 3-2. Ha самом деле APIC состоит из нескольких компонентов: APIC ввода-вывода, принимающего прерывания от устройств, локальных APIC, принимающих прерывания от APIC ввода-вывода по выделенной шине и прерывающих pa-ботутого процессора, с которым они связаны, а также 18259А-совместимого контроллера прерываний, транслирующего входные сигналы APIC в соответствующие PIC-эквиваленты. APIC ввода-вывода отвечает за реализацию алгоритмов перенаправления прерываний, и операционная система выбирает нужный ей алгоритм (в Windows выбор возлагается на HAL). Эти алгоритмы равномерно распределяют между процессорами нагрузку, связанную с обработкой прерываний от устройств, и в максимальной мере используют все преимущества локальности, направляя такие прерывания процессору, который только что обрабатывал прерывания аналогичного типа.
Поскольку архитектура x64 совместима с операционными системами для x86, системы на базе x64 должны предоставлять те же контроллеры прерываний, что и на базе x86. Однако х64-версии Windows не будут работать на системах без APIC (т. е. они не поддерживают PIC).
B архитектуре IA64 используется контроллер прерываний Streamlined Advanced Programmable Interrupt Controller (SAPIC) - результат эволюционного развития APIC Главное различие между архитектурами APIC и SAPIC в том, что APIC ввода-вывода в APIC-системе направляет прерывания локальным APIC по выделенной шине APIC, тогда как в системе SAPIC прерывания передаются по шине ввода-вывода и системы (I/O and system bus) для большего быстродействия. Еще одно различие - перенаправление прерываний и балансировка нагрузки в APIC-системе обрабатывается самой шиной APIC, а в SAPIC-системе, где нет выделенной шины APIC, требуется, чтобы соответствующая поддержка была запрограммирована в микрокоде (прошивке). Ho, даже если эта поддержка имеется в микрокоде, Windows не использует ее - вместо этого она статически назначает прерывания процессорам по принципу карусели.
ЭКСПЕРИМЕНТ: просмотр конфигурации PIC и APIC
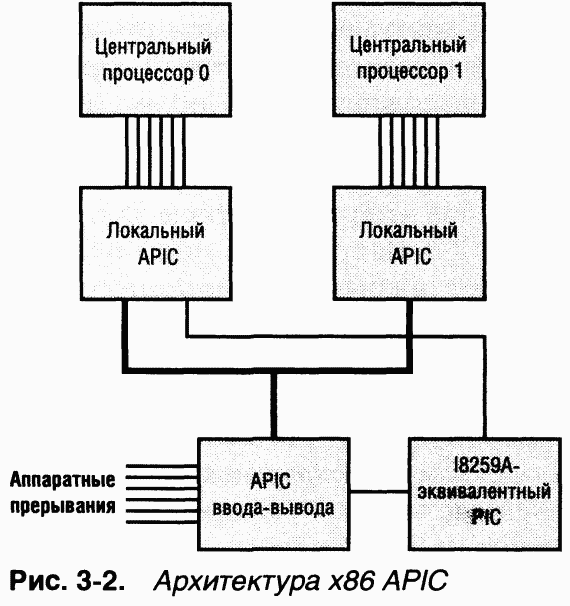
Конфигурацию PIC в однопроцессорной системе и APIC в многопроцессорной системе можно просмотреть с помощью команд !picили !apicотладчика ядра. (Для этого эксперимента LiveKd не годится, так как она не может напрямую обращаться к оборудованию.) Ниже показан образец вывода команды !picв однопроцессорной системе (учтите, что команда !picне работает в системе, использующей APIC HAL).
 Ha следующем листинге приводится выходная информация команды
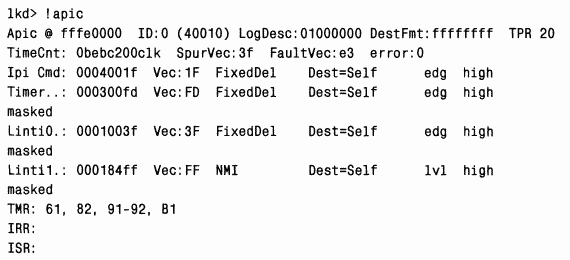
!apicв системе, использующей MPS HAL. Префикс «0:» в командной строке отладчика говорит о том, что текущие команды выполняются на процессоре 0, поэтому данный листинг относится к APIC ввода-вывода процессора 0.
Ha следующем листинге приводится выходная информация команды
!apicв системе, использующей MPS HAL. Префикс «0:» в командной строке отладчика говорит о том, что текущие команды выполняются на процессоре 0, поэтому данный листинг относится к APIC ввода-вывода процессора 0.
 Теперь взгляните на образец вывода команды
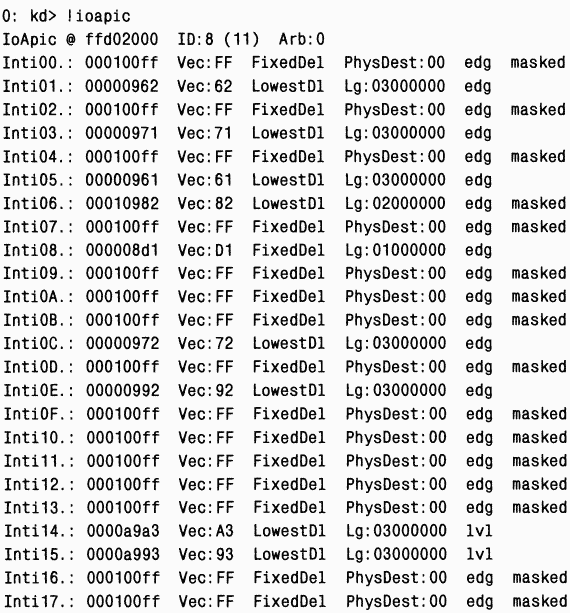
!ioapic,показывающей конфигурацию APIC ввода-вывода:
Теперь взгляните на образец вывода команды
!ioapic,показывающей конфигурацию APIC ввода-вывода:
 Уровни запросов программных прерываний
Уровни запросов программных прерываний
Хотя контроллеры прерываний различают уровни приоритетов прерываний, Windows использует свою схему приоритетов прерываний, известную под названием уровни запросов прерываний(interrupt request levels, IRQL). Внутри ядра IRQL представляются в виде номеров 0-31 в системах x86 и 0-15 в системах x64 и IA64, причем больший номер соответствует прерыванию с более высоким приоритетом. Ядро определяет стандартный набор IRQL для программных прерываний, a HAL увязывает IRQL с номерами аппаратных прерываний. IRQL, определенные для архитектуры x86, показаны на рис. 3-3, а аналогичные сведения для архитектур x64 и IA64 - на рис. 3-4.
ПРИМЕЧАНИЕ Уровень SYNCH_LEVEL, используемый многопроцессорными версиями ядра для защиты доступа к индивидуальным для каждого процессора блокам PRCB (processor control blocks), не показан на этих схемах, так как его значение варьируется в разных версиях Windows. Описание SYNCH_LEVEL и его возможных значений см. в главе 6.
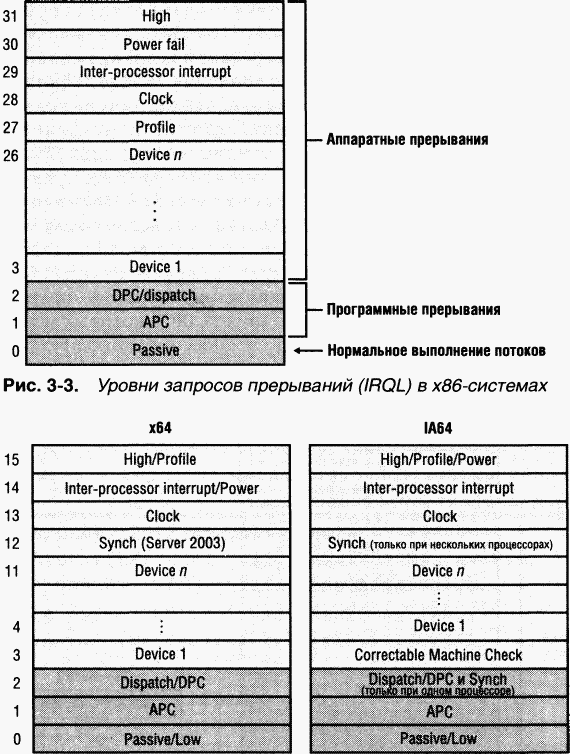 Рис. 3-4.
Уровни запросов прерываний (IRQL) в системах x64 и IA64
Рис. 3-4.
Уровни запросов прерываний (IRQL) в системах x64 и IA64
Прерывания обслуживаются в порядке их приоритета, и прерывания с более высоким приоритетом вытесняют обработку прерываний с меньшим приоритетом. При возникновении прерывания с высоким приоритетом процессор сохраняет информацию о состоянии прерванного потока и активизирует сопоставленный с данным прерыванием диспетчер ловушки. Последний повышает IRQL и вызывает процедуру обслуживания прерывания (ISR). После выполнения ISR диспетчер прерывания понижает IRQL процессора до исходного уровня и загружает сохраненные ранее данные о состоянии машины. Прерванный поток возобновляется с той точки, где он был прерван. Когда ядро понижает IRQL, могут «материализоваться» ранее замаскированные прерывания с более низким приоритетом. Тогда вышеописанный процесс повторяется ядром для обработки и этих прерываний.
Уровни приоритетов IRQL имеют совершенно иной смысл, чем приоритеты в схеме планирования потоков (см. главу 6). Приоритет в этой схеме является атрибутом потока, тогда как IRQL - атрибутом источника прерывания, например клавиатуры или мыши. Кроме того, IRQL каждого процессора меняется во время выполнения команд операционной системы.
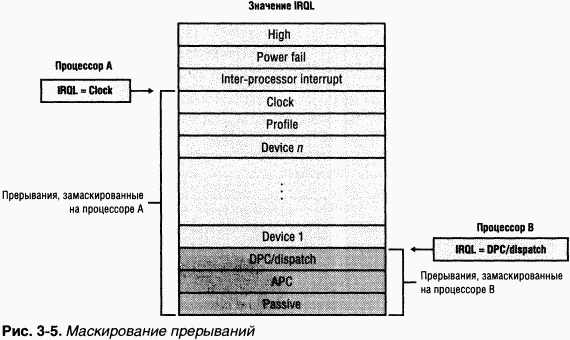
Значение IRQL определяет, какие прерывания может получать данный процессор. IRQL также используется для синхронизации доступа к структурам данных режима ядра (о синхронизации мы поговорим позже). При выполнении поток режима ядра повышает или понижает IRQL процессора либо напрямую (вызовом соответственно KeRaiseIrqlили KeLowerIrqL),либо - что бывает гораздо чаще - опосредованно (через функции, которые обращаются к синхронизирующим объектам ядра). Как показано на рис. 3-5 ,прерывания от источника с IRQL, превышающим текущий уровень, прерывают работу процессора, а прерывания от источников, IRQL которых меньше или равен текущему уровню ,маскируютсядо тех пор, пока выполняемый поток не понизит IRQL.
 Поскольку доступ к PIC - операция довольно медленная, в HAL, использующих PIC, реализован механизм оптимизации «отложенный IRQL» (lazy IRQL), который избегает обращений к PIC Когда IRQL повышается, HAL - вместо того чтобы изменять маску прерывания - просто отмечает новый IRQL. Если вслед за этим возникает прерывание с более низким приоритетом, HAL устанавливает маску прерывания в соответствии с первым и откладывает обработку прерывания с более низким приоритетом до понижения IRQL. Таким образом, если при повышенном IRQL не возникнет прерываний с более низким приоритетом, HAL не потребуется обращаться к PIC.
Поскольку доступ к PIC - операция довольно медленная, в HAL, использующих PIC, реализован механизм оптимизации «отложенный IRQL» (lazy IRQL), который избегает обращений к PIC Когда IRQL повышается, HAL - вместо того чтобы изменять маску прерывания - просто отмечает новый IRQL. Если вслед за этим возникает прерывание с более низким приоритетом, HAL устанавливает маску прерывания в соответствии с первым и откладывает обработку прерывания с более низким приоритетом до понижения IRQL. Таким образом, если при повышенном IRQL не возникнет прерываний с более низким приоритетом, HAL не потребуется обращаться к PIC.
Поток режима ядра повышает и понижает IRQL процессора, на котором он выполняется, в зависимости от того, что именно делает этот поток. Например, обработчик ловушки (или сам процессор) при прерывании повышает IRQL процессора до IRQL источника прерывания. B результате все прерывания с более низким или равным IRQL маскируются (только на этом процессоре), что не дает прерыванию с таким же или более низким IRQL помешать процессору обработать текущее прерывание. Замаскированные прерывания либо обрабатываются другим процессором, либо откладываются до понижения IRQL. Поэтому все системные компоненты, в том числе ядро и драйверы устройств, пытаются удерживать IRQL на уровне passive («пассивный»), иногда называемом низким уровнем. Если бы IRQL долго оставался неоправданно высоким, драйверы устройств не смогли бы оперативно реагировать на аппаратные прерывания.
ПРИМЕЧАНИЕ Прерывания APC_LEVEL являются исключением из правила, которое гласит, что повышение IRQL блокирует прерывания такого же уровня и ниже. Если поток повышает IRQL до уровня APC_ LEVEL, а затем отключается от процессора из-за появления прерывания DISPATCH_LEVEL, то система может доставить ему прерывание APC_LEVEL, как только он вновь получит процессорное время. Таким образом, APC_LEVEL можно считать IRQL, локальным для потока.
ЭКСПЕРИМЕНТ: определяем IRQL
Если вы работаете с отладчиком ядра в Windows Server 2003, то можете определить IRQL процессора командой !irql:
kd› !irql
Debugger saved IRQL for processor 0x0 - 0 (L0W_LEVEL)
Заметьте, что в структуре данных, называемой PCR (processor control region), и ее расширении - PRCB (processor control block) имеется поле с именем Irql. Эти структуры содержат информацию о состоянии каждого процессора в системе, в том числе текущий IRQL, указатель на аппаратную IDT, сведения о текущем потоке и потоке, который будет выполняться следующим. Ядро и HAL используют эту информацию для выполнения операций, специфичных для данной машины и ее архитектуры. Отдельные части структур PCR и PRCB открыто определены в заголовочном файле Ntddk.h (в Windows DDK). Загляните в него, чтобы получить представление об этих структурах.
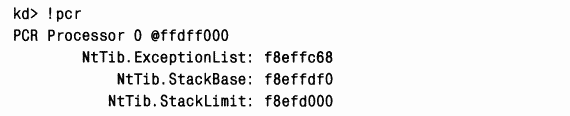
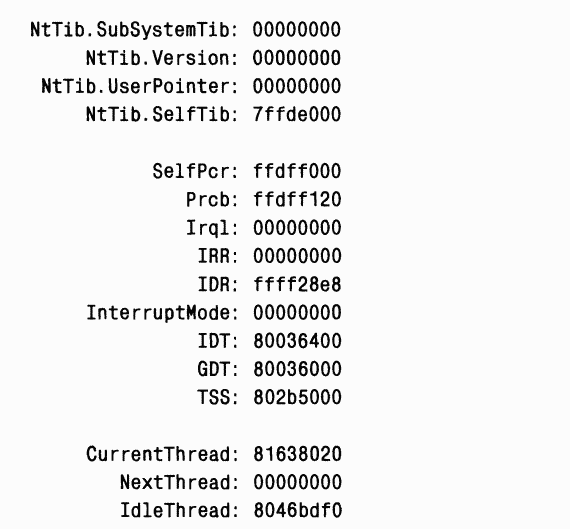
Для просмотра содержимого PCR воспользуемся командой !pcrотладчика ядра.
 K сожалению, Windows не поддерживает поле Irql на платформах, не использующих отложенные IRQL, поэтому в большинстве систем это поле всегда содержит 0.
K сожалению, Windows не поддерживает поле Irql на платформах, не использующих отложенные IRQL, поэтому в большинстве систем это поле всегда содержит 0.
Так как изменения IRQL процессора существенно влияют на функционирование системы, они возможны только в режиме ядра. Потоки пользовательского режима не могут изменять IRQL процессора. Это значит, что при выполнении потоков пользовательского режима значение IRQL процессора всегда равно passive. Только при выполнении кода режима ядра IRQL может быть выше этого уровня.
Каждый уровень прерывания имеет определенное назначение. Так, ядро генерирует межпроцессорное прерывание(interprocessor interrupt, IPI), чтобы потребовать выполнения какой-либо операции от другого процессора, например, при диспетчеризации некоего потока или обновлении кэша ассоциативного буфера трансляции [translation look-aside buffer (TLB) cache]. Системный таймер через регулярные промежутки генерирует прерывания, на которые ядро реагирует обновлением системного времени, и это используется для измерения продолжительности выполнения потока. Если аппаратная платформа поддерживает два таймера, то для измерения производительности ядро добавляет еще один уровень прерываний от таймера. HAL поддерживает несколько уровней запросов прерываний для устройств, управляемых прерываниями; конкретное число таких уровней зависит от процессора и конфигурации системы. Ядро использует программные прерывания для инициации планирования потоков и асинхронного вмешательства в выполнение потока.
Уровни IRQL и запросы прерываний (IRQ) - вещи разные. Концепция IRQL в архитектурах, на которых работает Windows, не реализована аппаратно. Тогда возникает вопрос как Windows определяет, какой IRQL следует присвоить прерыванию? Ответ нужно искать в HAL. B Windows за определение устройств на конкретной шине (PCI, USB и т. д.) и назначение им прерываний отвечают драйверы устройств особого типа - драйверы шин. Драйвер шинысообщает эту информацию диспетчеру Plug and Play, и тот, учитывая приемлемые для других устройств прерывания, принимает решение о конкретных прерываниях, выделяемых каждому устройству. Далее он вызывает HAL-функцию HalpGetSystemInterruptVector,которая увязывает прерывания со значениями IRQL.
Этот алгоритм неодинаков в различных версиях HAL. B однопроцессорных х86-системах HAL выполняет прямую трансляцию: IRQL данного вектора прерывания вычисляется путем вычитания значения вектора из 27. Таким образом, если устройство использует 5-й вектор прерывания, его ISR выполняется при IRQL, равном 22. B многопроцессорной х86-системе преобразования более сложны. APIC поддерживает более 200 векторов прерываний, поэтому при трансляции «один в один» имеющихся IRQL окажется недостаточно. Многопроцессорная версия HAL присваивает IRQL векторам прерываний, циклически перебирая значения из диапазона IRQL устройств (device IRQL, DIRQL). B итоге на многопроцессорной х86-системе не так-то просто предсказать или выяснить IRQL, назначаемый IRQ. Наконец, в x64- и IА64-системах HAL вычисляет IRQL для IRQ путем деления вектора прерывания, назначенного данному IRQ, на 16.
Давайте повнимательнее приглядимся к предопределенным IRQL, начиная с самого верхнего уровня схемы, представленной на рис. 3-5.
(o)Уровень «high» (высокий) используется ядром, только если оно останавливает систему в функции KeBugCheckExи маскирует все прерывания.
(o)Уровень «power fail» (отказ электропитания) был заложен еще в самый первый проект Microsoft Windows NT Он определяет поведение системы при отказе электропитания, но никогда не применялся.
(o)Уровень «interprocessor interrupt» (межпроцессорное прерывание) используется для того, чтобы запрашивать от другого процессора выполнение какой-либо операции, например, при постановке в очередь прерывания DISPATCH_EVEL для планирования конкретного потока к выполнению, при обновлении кэша TLB, завершении работы или крахе системы.
(o)Уровень «clock» (часы) используется для системных часов, с помощью которых ядро отслеживает время суток, измеряет и распределяет процессорное время между потоками.
(o)Уровень «profile» (профиль) используется системным таймером реального времени, если активизирован механизм профилирования ядра (kernel profiling), т. е. измерения его производительности. Когда он активен, обработчик ловушки профилирования регистрирует адрес команды, выполнявшейся на момент прерывания. Co временем создается таблица адресов, которую можно извлечь и проанализировать с помощью соответствующих утилит. Вы можете скачать утилиту Kernrate ,позволяющую просматривать статистику, полученную при использовании механизма профилирования ядра. Подробнее об этой утилите см. описание эксперимента с Kernrate.
(o)Уровень «device» (устройство) применяется для задания приоритетов прерываний от устройств (о принципах увязки аппаратных прерываний с IRQL см. предыдущий раздел).
(o)Прерывания уровней «DPC/dispatch» и «APC» являются программными; они генерируются ядром и драйверами устройств (о DPC и APC будет рассказано позже).
(o)Самый низкий уровень IRQL, «passive» (пассивный), на самом деле вообще не является уровнем прерывания. При этом значении IRQL потоки выполняются обычным образом и могут возникать любые прерывания.
ЭКСПЕРИМЕНТ: применение утилиты Kernrate
Утилита профилирования ядра (Kernrate) позволяет включать таймер профилирования системы, собирать образцы кода, выполняемого при срабатывании таймера, и выводить сводную информацию, отражающую распределение процессорного времени по образам файлов и функциям. Ee можно использовать для отслеживания процессорного времени, потребляемого индивидуальными процессами, и/или времени, проведенного в режиме ядра независимо от процессов (например, для выполнения процедур обслуживания прерываний). Профилирование ядра полезно, когда вы хотите выявить точки, в которых на выполнение кода тратится больше всего процессорного времени.
B своей простейшей форме Kernrate сообщает, сколько процессорного времени было использовано каждым модулем ядра (Ntoskrnl, драйверами и т.д.). Попробуйте, к примеру, выполнить следующие операции.
1. Откройте окно командной строки.
2. Введите cd c:\program files\krview\kernrates.
3. Введите dir.(Вы увидите образы kernrate для каждой платформы.)
4. Запустите образ, который подходит для вашей платформы (без аргументов или ключей). Например, Kernrate_i386_XP.exe - это образ для Windows XP на платформе x86.
5. Пока Kernrate выполняется, поделайте что-нибудь в системе. Скажем, запустите Windows Media Player и проиграйте музыку, запустите игру, интенсивно работающую с графикой, или перечислите содержимое каталога на удаленном сетевом ресурсе.
6. Нажмите Ctrl+C, чтобы остановить Kernrate. Это заставит Kernrate вывести статистику за прошедший период.
Ниже приведена часть вывода Kernrate, когда выполнялся Windows Media Player, воспроизводивший дорожку с компакт-диска.
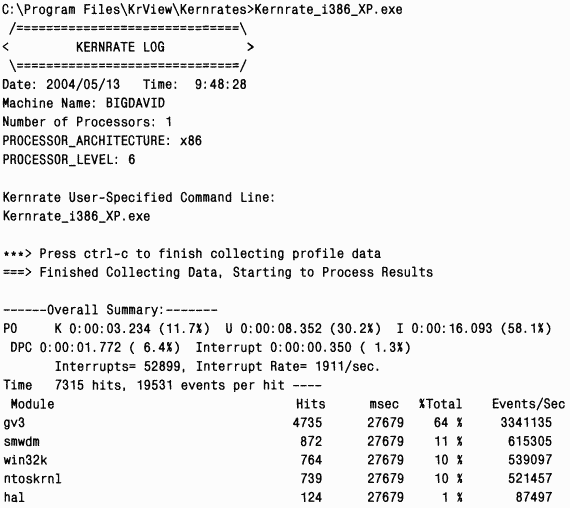 Сводные данные показывают, что система провела 11,7% времени в режиме ядра, 30,2% в пользовательском режиме, 58,1% в простое, 6,4% на уровне DPC и 1,3% на уровне прерываний (interrupt level). Модуль, чаще всего требовавший к себе внимания, был GV3.SYS, драйвер процессора для Pentium M (семейства Geyserville). Он используется для сбора информации о производительности, поэтому и оказался на первом месте. Модуль, занявший второе место, - Smwdm.sys, драйвер звуковой платы на компьютере, где проводился тест. Это вполне объяснимо, учитывая, что основную нагрузку в системе создавал Windows Media Player, посылавший звуковой ввод-вывод этому драйверу.
Сводные данные показывают, что система провела 11,7% времени в режиме ядра, 30,2% в пользовательском режиме, 58,1% в простое, 6,4% на уровне DPC и 1,3% на уровне прерываний (interrupt level). Модуль, чаще всего требовавший к себе внимания, был GV3.SYS, драйвер процессора для Pentium M (семейства Geyserville). Он используется для сбора информации о производительности, поэтому и оказался на первом месте. Модуль, занявший второе место, - Smwdm.sys, драйвер звуковой платы на компьютере, где проводился тест. Это вполне объяснимо, учитывая, что основную нагрузку в системе создавал Windows Media Player, посылавший звуковой ввод-вывод этому драйверу.
Если у вас есть файлы символов, вы можете исследовать индивидуальные модули и посмотреть, сколько времени было затрачено каждой из их функций. Например, профилирование системы в процессе быстрого перемещения окна по экрану давало такой вывод (здесь приведена лишь его часть):
C:\Program Files\KrView\Kernrates›Kernrate_i386_XP.exe -z ntoskrnl -z win32k
 B данном случае самым «прожорливым» был модуль Win32k.sys, драйвер системы, отвечающей за работу с окнами. Второй в списке - видеодрайвер. И действительно, основная нагрузка в системе была связана с рисованием окна на экране. B детальном выводе для Win32k.sys видно, что наиболее активна была его функция EngPaint, основная GDI-функция для рисования на экране.
B данном случае самым «прожорливым» был модуль Win32k.sys, драйвер системы, отвечающей за работу с окнами. Второй в списке - видеодрайвер. И действительно, основная нагрузка в системе была связана с рисованием окна на экране. B детальном выводе для Win32k.sys видно, что наиболее активна была его функция EngPaint, основная GDI-функция для рисования на экране.
Ha код, выполняемый на уровне «DPC/dispatch» и выше, накладывается важное ограничение: он не может ждать освобождения объекта, если такое ожидание заставило бы планировщик подключить к процессору другой поток (а это недопустимая операция, так как планировщик синхронизирует свои структуры данных на уровне «DPC/dispatch» и, следовательно, не может быть активизирован для выполнения перераспределения процессорного времени). Другое ограничение заключается в том, что при уровне IRQL «DPC/ dispatch» или выше доступна только неподкачиваемая память. Ha самом деле второе ограничение является следствием первого, так как обращение к отсутствующей в оперативной памяти странице вызывает ошибку страницы. Тогда диспетчер памяти должен был бы инициировать операцию дискового ввода-вывода, после чего ждать, когда драйвер файловой системы загрузит эту страницу с диска. Это в свою очередь вынудило бы планировщик переключить контекст (возможно, на поток простоя, если нет ни одного пользовательского потока, ждущего выполнения). B результате было бы нарушено правило, запрещающее вызов планировщика в таких ситуациях (поскольку при чтении с диска IRQL все еще остается на уровне «DPC/dispatch» или выше). При нарушении любого из этих двух ограничений происходит крах системы с кодом завершения IRQL_NOT_LESS_OR_EQUAL (подробнее о кодах завершения при крахе системы см. главу 4). Кстати, нарушение этих ограничений является довольно распространенной ошибкой в драйверах устройств. Локализовать причину ошибок такого типа помогает утилита Driver Verifier, о которой будет подробно рассказано в разделе «Утилита Driver Verifier» главы 7.
Ядро предоставляет переносимый (портируемый) механизм - объект прерывания, позволяющий драйверам устройств регистрировать ISR для своих устройств. Этот объект содержит всю информацию, необходимую ядру для назначения конкретного уровня прерывания для ISR устройства, включая адрес ISR, IRQL устройства и запись в IDT ядра, с которой должна быть сопоставлена ISR. При инициализации в объект прерывания из шаблона обработки прерываний, KiIn-terruptTemplate, копируется несколько ассемблерных инструкций - код диспетчеризации. Этот код выполняется при возникновении прерывания.
B большинстве случаев ядро устанавливает функции, выполняющие общую обработку ловушек до и после передачи управления другим функциям, которые ставят ловушки. Например, когда устройство генерирует прерывание, обработчик ловушек аппаратных прерываний (принадлежащий ядру) передает управление процедуре обслуживания прерывания(interrupt service routine, ISR), предоставленной драйвером соответствующего устройства. Если прерывание возникло в результате вызова системного сервиса, обработчик ловушек общесистемных сервисов передает управление функции указанного системного сервиса в исполнительной системе. Ядро также устанавливает обработчики для ловушек, которые оно не ожидает или не обрабатывает. Эти обработчики, как правило, выполняют системную функцию KeBugCheckEx.Она останавливает компьютер, если ядро обнаруживает в работе системы отклонения, способные привести к повреждению данных (подробнее об этом см. главу 14). Диспетчеризация прерываний, исключений и системных сервисов детальнее описывается в следующих разделах.
Диспетчеризация прерываний
Аппаратные прерывания обычно генерируются устройствами ввода-вывода, которые таким образом уведомляют процессор о необходимости уделить им внимание. Устройства, управляемые на основе прерываний, позволяют операционной системе максимально полно использовать процессор, совмещая основную обработку с обслуживанием ввода-вывода. Выдав запрос на ввод-вывод, поток может заняться другой работой, пока устройство выполняет запрошенную операцию. Закончив, устройство генерирует прерывание, и процессор переключается на обслуживание этого устройства. Прерываниями управляются, как правило, координатные устройства, принтеры, клавиатуры, дисковые устройства и сетевые платы.
Системное программное обеспечение также может генерировать прерывания. Ядро способно отключать прерывания, чтобы не прерывать работу процессора, однако это делается нечасто - только в критические моменты, например при обработке прерываний или диспетчеризации исключения.
Для обработки аппаратных прерываний ядро устанавливает обработчики ловушек прерываний, которые передают управление внешней процедуре (ISR), обрабатывающей прерывание, или внутренней процедуре ядра, реагирующей на прерывание. Драйверы устройств предоставляют ISR для обслуживания прерываний от своих устройств, а ядро - внутренние процедуры для обработки других типов прерываний.
Далее мы рассмотрим, как процессор уведомляется об аппаратных прерываниях, какие типы прерываний поддерживаются ядром и как драйверы устройств взаимодействуют с ядром (в процессе обработки прерываний). Кроме того, мы поговорим о распознавании ядром программных прерываний и об объектах, используемых для реализации таких прерываний.
Обработка аппаратных прерываний
Ha аппаратных платформах, поддерживаемых Windows, прерывания, связанные с внешним вводом-выводом, поступают по одной из линий контроллера прерываний. Контроллер в свою очередь связан с процессором единственной линией, по которой и уведомляет о прерывании. Как только процессор прерывается, он требует от контроллера запрос прерывания (interrupt request, IRQ). Контроллер транслирует IRQ в номер прерывания, используемый как индекс в структуре, называемой таблицей диспетчеризации прерываний(interrupt dispatch table, IDT), и передает управление соответствующей процедуре. При загрузке Windows заносит в IDT указатели на процедуры ядра, обрабатывающие каждое прерывание и исключение.
ЭКСПЕРИМЕНТ: просмотр IDT
Просмотреть содержимое IDT, включая сведения об обработчиках ловушек, которые Windows назначила прерываниям, можно с помощью команды !idtотладчика ядра. Команда !idtбез флагов показывает векторы, которые сопоставлены с адресами в модулях, отличных от Ntoskrnl.exe.
Ниже показано, что выводит команда !idt.
Windows увязывает аппаратные IRQ с номерами прерываний в IDT. Эта таблица используется системой и при конфигурировании обработчиков ловушек для исключений. Так, номер исключения для ошибки страницы на x86 и x64 (это исключение возникает, когда поток пытается получить доступ к отсутствующей или не определенной в виртуальной памяти странице) равен 0xe. Следовательно, запись 0xe в IDT указывает на системный обработчик ошибок страниц. Хотя архитектуры, поддерживаемые Windows, допус-каютдо 256 элементов в IDT, число IRQ на конкретной машине определяется архитектурой используемого в ней контроллера прерываний.
У каждого процессора имеется своя IDT, так что разные процессоры могут при необходимости выполнять разные ISR. Например, в многопроцессорной системе каждый процессор получает прерывания системного таймера, но обновление значения системного таймера в результате обработки этого прерывания осуществляется только одним процессором. Однако все процессоры используют это прерывание для измерения кванта времени, выделенного потоку, и для инициации новой процедуры планирования по истечении этого кванта. Аналогичным образом в некоторых конфигурациях может понадобиться, чтобы определенные аппаратные прерывания обрабатывал конкретный процессор.
Контроллеры прерываний на платформе x86
B большинстве систем x86 применяется либо программируемый контроллер прерываний (Programmable Interrupt Controller, PIC) i8259A, либо его разновидность, усовершенствованный программируемый контроллер прерываний (Advanced Programmable Interrupt Controller, APIC) i82489. Новые компьютеры, как правило, оснащаются APIC Стандарт PIC был разработан для оригинальных IBM PC PIC работает только в однопроцессорных системах и имеет 15 линий прерываний. APIC и SAPIC (о нем чуть позже) способен работать в многопроцессорных системах и предлагает 256 линий прерываний. Intel совместно с другими компаниями создали спецификацию Multiprocessor (MP) Specification, стандарт для многопроцессорных систем x86, основанный на использовании APIC Для совместимости с однопроцессорными операционными системами и загрузочным кодом, запускающим многопроцессорную систему в однопроцессорном режиме, APIC поддерживает PIC-совместимый режим с 15 линиями прерываний и передачей прерываний лишь главному процессору. Архитектура APIC показана на рис. 3-2. Ha самом деле APIC состоит из нескольких компонентов: APIC ввода-вывода, принимающего прерывания от устройств, локальных APIC, принимающих прерывания от APIC ввода-вывода по выделенной шине и прерывающих pa-ботутого процессора, с которым они связаны, а также 18259А-совместимого контроллера прерываний, транслирующего входные сигналы APIC в соответствующие PIC-эквиваленты. APIC ввода-вывода отвечает за реализацию алгоритмов перенаправления прерываний, и операционная система выбирает нужный ей алгоритм (в Windows выбор возлагается на HAL). Эти алгоритмы равномерно распределяют между процессорами нагрузку, связанную с обработкой прерываний от устройств, и в максимальной мере используют все преимущества локальности, направляя такие прерывания процессору, который только что обрабатывал прерывания аналогичного типа.
Контроллеры прерываний на платформе x64
Поскольку архитектура x64 совместима с операционными системами для x86, системы на базе x64 должны предоставлять те же контроллеры прерываний, что и на базе x86. Однако х64-версии Windows не будут работать на системах без APIC (т. е. они не поддерживают PIC).
Контроллеры прерываний на платформе IA64
B архитектуре IA64 используется контроллер прерываний Streamlined Advanced Programmable Interrupt Controller (SAPIC) - результат эволюционного развития APIC Главное различие между архитектурами APIC и SAPIC в том, что APIC ввода-вывода в APIC-системе направляет прерывания локальным APIC по выделенной шине APIC, тогда как в системе SAPIC прерывания передаются по шине ввода-вывода и системы (I/O and system bus) для большего быстродействия. Еще одно различие - перенаправление прерываний и балансировка нагрузки в APIC-системе обрабатывается самой шиной APIC, а в SAPIC-системе, где нет выделенной шины APIC, требуется, чтобы соответствующая поддержка была запрограммирована в микрокоде (прошивке). Ho, даже если эта поддержка имеется в микрокоде, Windows не использует ее - вместо этого она статически назначает прерывания процессорам по принципу карусели.
ЭКСПЕРИМЕНТ: просмотр конфигурации PIC и APIC
Конфигурацию PIC в однопроцессорной системе и APIC в многопроцессорной системе можно просмотреть с помощью команд !picили !apicотладчика ядра. (Для этого эксперимента LiveKd не годится, так как она не может напрямую обращаться к оборудованию.) Ниже показан образец вывода команды !picв однопроцессорной системе (учтите, что команда !picне работает в системе, использующей APIC HAL).
Хотя контроллеры прерываний различают уровни приоритетов прерываний, Windows использует свою схему приоритетов прерываний, известную под названием уровни запросов прерываний(interrupt request levels, IRQL). Внутри ядра IRQL представляются в виде номеров 0-31 в системах x86 и 0-15 в системах x64 и IA64, причем больший номер соответствует прерыванию с более высоким приоритетом. Ядро определяет стандартный набор IRQL для программных прерываний, a HAL увязывает IRQL с номерами аппаратных прерываний. IRQL, определенные для архитектуры x86, показаны на рис. 3-3, а аналогичные сведения для архитектур x64 и IA64 - на рис. 3-4.
ПРИМЕЧАНИЕ Уровень SYNCH_LEVEL, используемый многопроцессорными версиями ядра для защиты доступа к индивидуальным для каждого процессора блокам PRCB (processor control blocks), не показан на этих схемах, так как его значение варьируется в разных версиях Windows. Описание SYNCH_LEVEL и его возможных значений см. в главе 6.
Прерывания обслуживаются в порядке их приоритета, и прерывания с более высоким приоритетом вытесняют обработку прерываний с меньшим приоритетом. При возникновении прерывания с высоким приоритетом процессор сохраняет информацию о состоянии прерванного потока и активизирует сопоставленный с данным прерыванием диспетчер ловушки. Последний повышает IRQL и вызывает процедуру обслуживания прерывания (ISR). После выполнения ISR диспетчер прерывания понижает IRQL процессора до исходного уровня и загружает сохраненные ранее данные о состоянии машины. Прерванный поток возобновляется с той точки, где он был прерван. Когда ядро понижает IRQL, могут «материализоваться» ранее замаскированные прерывания с более низким приоритетом. Тогда вышеописанный процесс повторяется ядром для обработки и этих прерываний.
Уровни приоритетов IRQL имеют совершенно иной смысл, чем приоритеты в схеме планирования потоков (см. главу 6). Приоритет в этой схеме является атрибутом потока, тогда как IRQL - атрибутом источника прерывания, например клавиатуры или мыши. Кроме того, IRQL каждого процессора меняется во время выполнения команд операционной системы.
Значение IRQL определяет, какие прерывания может получать данный процессор. IRQL также используется для синхронизации доступа к структурам данных режима ядра (о синхронизации мы поговорим позже). При выполнении поток режима ядра повышает или понижает IRQL процессора либо напрямую (вызовом соответственно KeRaiseIrqlили KeLowerIrqL),либо - что бывает гораздо чаще - опосредованно (через функции, которые обращаются к синхронизирующим объектам ядра). Как показано на рис. 3-5 ,прерывания от источника с IRQL, превышающим текущий уровень, прерывают работу процессора, а прерывания от источников, IRQL которых меньше или равен текущему уровню ,маскируютсядо тех пор, пока выполняемый поток не понизит IRQL.
Поток режима ядра повышает и понижает IRQL процессора, на котором он выполняется, в зависимости от того, что именно делает этот поток. Например, обработчик ловушки (или сам процессор) при прерывании повышает IRQL процессора до IRQL источника прерывания. B результате все прерывания с более низким или равным IRQL маскируются (только на этом процессоре), что не дает прерыванию с таким же или более низким IRQL помешать процессору обработать текущее прерывание. Замаскированные прерывания либо обрабатываются другим процессором, либо откладываются до понижения IRQL. Поэтому все системные компоненты, в том числе ядро и драйверы устройств, пытаются удерживать IRQL на уровне passive («пассивный»), иногда называемом низким уровнем. Если бы IRQL долго оставался неоправданно высоким, драйверы устройств не смогли бы оперативно реагировать на аппаратные прерывания.
ПРИМЕЧАНИЕ Прерывания APC_LEVEL являются исключением из правила, которое гласит, что повышение IRQL блокирует прерывания такого же уровня и ниже. Если поток повышает IRQL до уровня APC_ LEVEL, а затем отключается от процессора из-за появления прерывания DISPATCH_LEVEL, то система может доставить ему прерывание APC_LEVEL, как только он вновь получит процессорное время. Таким образом, APC_LEVEL можно считать IRQL, локальным для потока.
ЭКСПЕРИМЕНТ: определяем IRQL
Если вы работаете с отладчиком ядра в Windows Server 2003, то можете определить IRQL процессора командой !irql:
kd› !irql
Debugger saved IRQL for processor 0x0 - 0 (L0W_LEVEL)
Заметьте, что в структуре данных, называемой PCR (processor control region), и ее расширении - PRCB (processor control block) имеется поле с именем Irql. Эти структуры содержат информацию о состоянии каждого процессора в системе, в том числе текущий IRQL, указатель на аппаратную IDT, сведения о текущем потоке и потоке, который будет выполняться следующим. Ядро и HAL используют эту информацию для выполнения операций, специфичных для данной машины и ее архитектуры. Отдельные части структур PCR и PRCB открыто определены в заголовочном файле Ntddk.h (в Windows DDK). Загляните в него, чтобы получить представление об этих структурах.
Для просмотра содержимого PCR воспользуемся командой !pcrотладчика ядра.
Так как изменения IRQL процессора существенно влияют на функционирование системы, они возможны только в режиме ядра. Потоки пользовательского режима не могут изменять IRQL процессора. Это значит, что при выполнении потоков пользовательского режима значение IRQL процессора всегда равно passive. Только при выполнении кода режима ядра IRQL может быть выше этого уровня.
Каждый уровень прерывания имеет определенное назначение. Так, ядро генерирует межпроцессорное прерывание(interprocessor interrupt, IPI), чтобы потребовать выполнения какой-либо операции от другого процессора, например, при диспетчеризации некоего потока или обновлении кэша ассоциативного буфера трансляции [translation look-aside buffer (TLB) cache]. Системный таймер через регулярные промежутки генерирует прерывания, на которые ядро реагирует обновлением системного времени, и это используется для измерения продолжительности выполнения потока. Если аппаратная платформа поддерживает два таймера, то для измерения производительности ядро добавляет еще один уровень прерываний от таймера. HAL поддерживает несколько уровней запросов прерываний для устройств, управляемых прерываниями; конкретное число таких уровней зависит от процессора и конфигурации системы. Ядро использует программные прерывания для инициации планирования потоков и асинхронного вмешательства в выполнение потока.
Увязка прерываний с IRQL
Уровни IRQL и запросы прерываний (IRQ) - вещи разные. Концепция IRQL в архитектурах, на которых работает Windows, не реализована аппаратно. Тогда возникает вопрос как Windows определяет, какой IRQL следует присвоить прерыванию? Ответ нужно искать в HAL. B Windows за определение устройств на конкретной шине (PCI, USB и т. д.) и назначение им прерываний отвечают драйверы устройств особого типа - драйверы шин. Драйвер шинысообщает эту информацию диспетчеру Plug and Play, и тот, учитывая приемлемые для других устройств прерывания, принимает решение о конкретных прерываниях, выделяемых каждому устройству. Далее он вызывает HAL-функцию HalpGetSystemInterruptVector,которая увязывает прерывания со значениями IRQL.
Этот алгоритм неодинаков в различных версиях HAL. B однопроцессорных х86-системах HAL выполняет прямую трансляцию: IRQL данного вектора прерывания вычисляется путем вычитания значения вектора из 27. Таким образом, если устройство использует 5-й вектор прерывания, его ISR выполняется при IRQL, равном 22. B многопроцессорной х86-системе преобразования более сложны. APIC поддерживает более 200 векторов прерываний, поэтому при трансляции «один в один» имеющихся IRQL окажется недостаточно. Многопроцессорная версия HAL присваивает IRQL векторам прерываний, циклически перебирая значения из диапазона IRQL устройств (device IRQL, DIRQL). B итоге на многопроцессорной х86-системе не так-то просто предсказать или выяснить IRQL, назначаемый IRQ. Наконец, в x64- и IА64-системах HAL вычисляет IRQL для IRQ путем деления вектора прерывания, назначенного данному IRQ, на 16.
Предопределенные IRQL
Давайте повнимательнее приглядимся к предопределенным IRQL, начиная с самого верхнего уровня схемы, представленной на рис. 3-5.
(o)Уровень «high» (высокий) используется ядром, только если оно останавливает систему в функции KeBugCheckExи маскирует все прерывания.
(o)Уровень «power fail» (отказ электропитания) был заложен еще в самый первый проект Microsoft Windows NT Он определяет поведение системы при отказе электропитания, но никогда не применялся.
(o)Уровень «interprocessor interrupt» (межпроцессорное прерывание) используется для того, чтобы запрашивать от другого процессора выполнение какой-либо операции, например, при постановке в очередь прерывания DISPATCH_EVEL для планирования конкретного потока к выполнению, при обновлении кэша TLB, завершении работы или крахе системы.
(o)Уровень «clock» (часы) используется для системных часов, с помощью которых ядро отслеживает время суток, измеряет и распределяет процессорное время между потоками.
(o)Уровень «profile» (профиль) используется системным таймером реального времени, если активизирован механизм профилирования ядра (kernel profiling), т. е. измерения его производительности. Когда он активен, обработчик ловушки профилирования регистрирует адрес команды, выполнявшейся на момент прерывания. Co временем создается таблица адресов, которую можно извлечь и проанализировать с помощью соответствующих утилит. Вы можете скачать утилиту Kernrate ,позволяющую просматривать статистику, полученную при использовании механизма профилирования ядра. Подробнее об этой утилите см. описание эксперимента с Kernrate.
(o)Уровень «device» (устройство) применяется для задания приоритетов прерываний от устройств (о принципах увязки аппаратных прерываний с IRQL см. предыдущий раздел).
(o)Прерывания уровней «DPC/dispatch» и «APC» являются программными; они генерируются ядром и драйверами устройств (о DPC и APC будет рассказано позже).
(o)Самый низкий уровень IRQL, «passive» (пассивный), на самом деле вообще не является уровнем прерывания. При этом значении IRQL потоки выполняются обычным образом и могут возникать любые прерывания.
ЭКСПЕРИМЕНТ: применение утилиты Kernrate
Утилита профилирования ядра (Kernrate) позволяет включать таймер профилирования системы, собирать образцы кода, выполняемого при срабатывании таймера, и выводить сводную информацию, отражающую распределение процессорного времени по образам файлов и функциям. Ee можно использовать для отслеживания процессорного времени, потребляемого индивидуальными процессами, и/или времени, проведенного в режиме ядра независимо от процессов (например, для выполнения процедур обслуживания прерываний). Профилирование ядра полезно, когда вы хотите выявить точки, в которых на выполнение кода тратится больше всего процессорного времени.
B своей простейшей форме Kernrate сообщает, сколько процессорного времени было использовано каждым модулем ядра (Ntoskrnl, драйверами и т.д.). Попробуйте, к примеру, выполнить следующие операции.
1. Откройте окно командной строки.
2. Введите cd c:\program files\krview\kernrates.
3. Введите dir.(Вы увидите образы kernrate для каждой платформы.)
4. Запустите образ, который подходит для вашей платформы (без аргументов или ключей). Например, Kernrate_i386_XP.exe - это образ для Windows XP на платформе x86.
5. Пока Kernrate выполняется, поделайте что-нибудь в системе. Скажем, запустите Windows Media Player и проиграйте музыку, запустите игру, интенсивно работающую с графикой, или перечислите содержимое каталога на удаленном сетевом ресурсе.
6. Нажмите Ctrl+C, чтобы остановить Kernrate. Это заставит Kernrate вывести статистику за прошедший период.
Ниже приведена часть вывода Kernrate, когда выполнялся Windows Media Player, воспроизводивший дорожку с компакт-диска.
Если у вас есть файлы символов, вы можете исследовать индивидуальные модули и посмотреть, сколько времени было затрачено каждой из их функций. Например, профилирование системы в процессе быстрого перемещения окна по экрану давало такой вывод (здесь приведена лишь его часть):
C:\Program Files\KrView\Kernrates›Kernrate_i386_XP.exe -z ntoskrnl -z win32k
Ha код, выполняемый на уровне «DPC/dispatch» и выше, накладывается важное ограничение: он не может ждать освобождения объекта, если такое ожидание заставило бы планировщик подключить к процессору другой поток (а это недопустимая операция, так как планировщик синхронизирует свои структуры данных на уровне «DPC/dispatch» и, следовательно, не может быть активизирован для выполнения перераспределения процессорного времени). Другое ограничение заключается в том, что при уровне IRQL «DPC/ dispatch» или выше доступна только неподкачиваемая память. Ha самом деле второе ограничение является следствием первого, так как обращение к отсутствующей в оперативной памяти странице вызывает ошибку страницы. Тогда диспетчер памяти должен был бы инициировать операцию дискового ввода-вывода, после чего ждать, когда драйвер файловой системы загрузит эту страницу с диска. Это в свою очередь вынудило бы планировщик переключить контекст (возможно, на поток простоя, если нет ни одного пользовательского потока, ждущего выполнения). B результате было бы нарушено правило, запрещающее вызов планировщика в таких ситуациях (поскольку при чтении с диска IRQL все еще остается на уровне «DPC/dispatch» или выше). При нарушении любого из этих двух ограничений происходит крах системы с кодом завершения IRQL_NOT_LESS_OR_EQUAL (подробнее о кодах завершения при крахе системы см. главу 4). Кстати, нарушение этих ограничений является довольно распространенной ошибкой в драйверах устройств. Локализовать причину ошибок такого типа помогает утилита Driver Verifier, о которой будет подробно рассказано в разделе «Утилита Driver Verifier» главы 7.
Объекты «прерывание» (interrupt objects)
Ядро предоставляет переносимый (портируемый) механизм - объект прерывания, позволяющий драйверам устройств регистрировать ISR для своих устройств. Этот объект содержит всю информацию, необходимую ядру для назначения конкретного уровня прерывания для ISR устройства, включая адрес ISR, IRQL устройства и запись в IDT ядра, с которой должна быть сопоставлена ISR. При инициализации в объект прерывания из шаблона обработки прерываний, KiIn-terruptTemplate, копируется несколько ассемблерных инструкций - код диспетчеризации. Этот код выполняется при возникновении прерывания.