Открытые системы нацелены на активное взаимодействие с внешней средой. Взаимодействие системы с внешней средой проявляется через обратную связь. Обмен ресурсами поддерживает равновесное положение системы во внешней среде.
Динамические – это системы развивающиеся, изменяющиеся во времени. Статические же системы представляют собой неподвижную модель реальной действительности, отражающие моментальное состояние какого-либо объекта.
Системы, в которых некоторый элемент (центральная подсистема) играет главную роль в ее функционировании, называются централизованными. В таких системах незначительные изменения центральной подсистемы приводят к значительным изменениям всей системы. В децентрализованных системах центральной подсистемы нет; подсистемы имеют примерно равную ценность для системы.
Табличное представление классификации систем приведено в табл. 4.2.
Классификации систем [2, 5]
Таблица 4.2
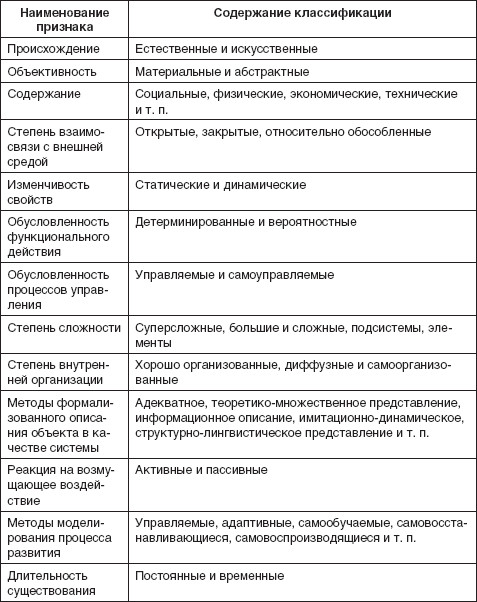
Чаще всего в процессе исследования систем используются три основных класса: абстрактные, естественные и искусственные. Первые – являются основой для эволюции научных теорий познания, в то время как вторые – для выявления закономерностей и формулирования законов природы всех явлений, третьи – применяются для развития отраслевых научных знаний.
Абстрактные – это системы теоретико-методологического характера, позволяющие описывать общие и специфические свойства организационной структуры элементов, связей и отношений в целостном образовании для познания, изучения и проектирования состояния, поведения и развития исследуемого сложного объекта в качестве системы.
К естественным принято относить те системы, которые имеют естественно-природное происхождение, а к искусственным – все остальные, которые были созданы человеком.
В зависимости от выбора критерия, по которому ведется оценка систем, может быть создано бесконечное множество классов систем. Например, если в основу классификации положить происхождение естественно существующих объектов и объектов, созданных человеком, то можно составить три класса систем: естественные, искусственные и смешанные.
Естественные системы в свою очередь могут включать подсистемы:
• живые (например, любое животное);
• неживые (например, земная кора);
• экологические (например, любой водоем);
• социальные (например, семья) и другие подсистемы.
К искусственным системам обычно относят орудия труда, машины и механизмы, автоматы и роботов.
Смешанные системы объединяют искусственные и естественные системы:
• эргономические (например, токарный станок и токарь);
• биотехнологические (например, микроорганизмы и технологическое оборудование);
• организационные (например, коллектив работников предприятия и средства производства);
• автоматизированные (например, автомат, приводимый в действие оператором).
Конечно же, каждая из перечисленных подсистем может быть представлена более детализированными подсистемами. Графическая модель приведенной классификации показана на рис. 4.7.
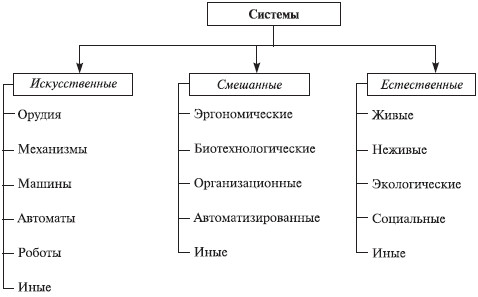
Рис. 4.7. Классификация систем
4.7. Типы способов управления и регулирования
Динамические – это системы развивающиеся, изменяющиеся во времени. Статические же системы представляют собой неподвижную модель реальной действительности, отражающие моментальное состояние какого-либо объекта.
Системы, в которых некоторый элемент (центральная подсистема) играет главную роль в ее функционировании, называются централизованными. В таких системах незначительные изменения центральной подсистемы приводят к значительным изменениям всей системы. В децентрализованных системах центральной подсистемы нет; подсистемы имеют примерно равную ценность для системы.
Табличное представление классификации систем приведено в табл. 4.2.
Классификации систем [2, 5]
Таблица 4.2
Чаще всего в процессе исследования систем используются три основных класса: абстрактные, естественные и искусственные. Первые – являются основой для эволюции научных теорий познания, в то время как вторые – для выявления закономерностей и формулирования законов природы всех явлений, третьи – применяются для развития отраслевых научных знаний.
Абстрактные – это системы теоретико-методологического характера, позволяющие описывать общие и специфические свойства организационной структуры элементов, связей и отношений в целостном образовании для познания, изучения и проектирования состояния, поведения и развития исследуемого сложного объекта в качестве системы.
К естественным принято относить те системы, которые имеют естественно-природное происхождение, а к искусственным – все остальные, которые были созданы человеком.
В зависимости от выбора критерия, по которому ведется оценка систем, может быть создано бесконечное множество классов систем. Например, если в основу классификации положить происхождение естественно существующих объектов и объектов, созданных человеком, то можно составить три класса систем: естественные, искусственные и смешанные.
Естественные системы в свою очередь могут включать подсистемы:
• живые (например, любое животное);
• неживые (например, земная кора);
• экологические (например, любой водоем);
• социальные (например, семья) и другие подсистемы.
К искусственным системам обычно относят орудия труда, машины и механизмы, автоматы и роботов.
Смешанные системы объединяют искусственные и естественные системы:
• эргономические (например, токарный станок и токарь);
• биотехнологические (например, микроорганизмы и технологическое оборудование);
• организационные (например, коллектив работников предприятия и средства производства);
• автоматизированные (например, автомат, приводимый в действие оператором).
Конечно же, каждая из перечисленных подсистем может быть представлена более детализированными подсистемами. Графическая модель приведенной классификации показана на рис. 4.7.
Рис. 4.7. Классификация систем
4.7. Типы способов управления и регулирования
Задача управления системой – предупреждать ее разрушение и отклонение от эффективного достижения целей. В этом смысле управление представляет собой функцию системы, направленную на удержание (в допустимых пределах) отклонений системы от заданных целей. Но управление в этом случае должно обеспечиваться измеримостью получаемых результатов и сравнением их с заданными; возможностью корректировки управляющих воздействий; быстрым (упреждающим) изменением системы в соответствии с изменением внешней среды.
Качественные и количественные изменения, происходящие в системе, связаны с изменениями параметров системы во времени и в пространстве. Динамику изменений соотношения между состояниями входа и выхода системы называют поведением системы.
Если под управлением системы понимают процесс получения заданного результата при направленном воздействии на вход системы, то обратная связь позволяет системе самостоятельно реагировать на воздействие внешней среды и приспосабливаться к ней. В этом случае говорят, что система обладает свойством вырабатывать внутреннее воздействие и является самоуправляемой.
Самоорганизация представляет собой процесс упорядочения системы за счет взаимодействия ее составляющих. Одной из основных характеристик самоорганизации является то, что процессы, происходящие в системе, не обладают постоянной во времени структурой, изменения происходят спонтанно и лишь частично зависят от внешних воздействий.
Самоорганизующиеся системы обладают следующими свойствами:
• способностью изменять среду в своих целях;
• приспособляемостью к изменениям внешней среды;
• непредсказуемостью поведения;
• способностью к самообучению.
Классификацию по способам управления построят в зависимости от того, откуда исходит управляющее воздействие: управляется ли система самостоятельно или извне или управление является комбинированным.
Указанные подсистемы могут быть представлены подсистемами более детализированными. Например, в зависимости от степени известности траектории, приводящей к заданной цели, и возможности управляющей системы удерживать управляемую систему на заданной траектории, системы, управляемые извне, можно представить следующими подсистемами.
Управление без обратной связи. В этом случае траектория движения подсистемы известна точно, и обратная связь между управляемой и управляющей системами отсутствует. Например, пуля, выпущенная из ружья, летит по заданной траектории.
Регулирование. Применяется в том случае, когда имеется возможность возвратить систему на заданную траекторию. Например, студент, не сдавший экзамен, должен выучить материал по курсу.
Управление по параметрам. Осуществляется в том случае, когда невозможно задать траекторию движения управляемого объекта на весь период времени, поэтому требуется «поднастройка» системы. Например, управляющие воздействия водителя, который едет на машине по проселочной дороге.
Управление по структуре. Применяется в том случае, если ни один из параметров не обеспечивает определение траектории. В этом случае цель недостижима, и приходится менять структуру системы. Примером может служить неплатежеспособное предприятие, подлежащее реструктуризации.
Типология способов управления системно представлена на рис. 4.8.
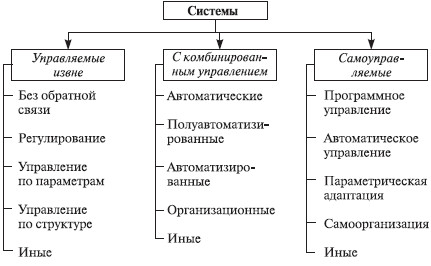
Рис. 4.8. Классификация типов способов управления
Схематически самоуправляемая система может быть представлена моделью, изображенной на рис. 4.9.
Переменные различают по типам. Количественные переменные могут быть дискретными, непрерывными и смешанными. Качественные – имеют формализованное описание или описание содержания.
Сами операторы систем (S и C) могут соответствовать модели «черного ящика» или модели «белого ящика». Они могут быть не параметризованными, когда S и C известны частично, или параметризованными, когда их содержание известно до параметра. Операторы также могут быть и смешанными.
Для построения самоорганизуемой системы в общем виде необходимо описать природу (происхождение), типологию и внутреннюю структуру систем С и S; рассмотреть типы переменных X, Y, Z; конкретизировать тип отображения элементов между системами S и C (т. е. определить тип оператора); рассмотреть способы управления двух систем (критерии и способы получения управляющих воздействий U) и в конце выйти на задание условий получения необходимых воздействий.
Из теории систем известно, что самоуправляемые системы для достижения цели, стоящей перед ними, изменяют во времени свои параметры (в первую очередь свою структуру) не столько в результате воздействий извне, сколько путем генерирования и реализации решений внутренними подсистемами и элементами самой системы. По существу, имеет место перебор все новых и новых моделей систем до тех пор, пока не будет найдена модель системы, обеспечивающая попадание системы в заданную целевую область.
Качественные и количественные изменения, происходящие в системе, связаны с изменениями параметров системы во времени и в пространстве. Динамику изменений соотношения между состояниями входа и выхода системы называют поведением системы.
Если под управлением системы понимают процесс получения заданного результата при направленном воздействии на вход системы, то обратная связь позволяет системе самостоятельно реагировать на воздействие внешней среды и приспосабливаться к ней. В этом случае говорят, что система обладает свойством вырабатывать внутреннее воздействие и является самоуправляемой.
Самоорганизация представляет собой процесс упорядочения системы за счет взаимодействия ее составляющих. Одной из основных характеристик самоорганизации является то, что процессы, происходящие в системе, не обладают постоянной во времени структурой, изменения происходят спонтанно и лишь частично зависят от внешних воздействий.
Самоорганизующиеся системы обладают следующими свойствами:
• способностью изменять среду в своих целях;
• приспособляемостью к изменениям внешней среды;
• непредсказуемостью поведения;
• способностью к самообучению.
Классификацию по способам управления построят в зависимости от того, откуда исходит управляющее воздействие: управляется ли система самостоятельно или извне или управление является комбинированным.
Указанные подсистемы могут быть представлены подсистемами более детализированными. Например, в зависимости от степени известности траектории, приводящей к заданной цели, и возможности управляющей системы удерживать управляемую систему на заданной траектории, системы, управляемые извне, можно представить следующими подсистемами.
Управление без обратной связи. В этом случае траектория движения подсистемы известна точно, и обратная связь между управляемой и управляющей системами отсутствует. Например, пуля, выпущенная из ружья, летит по заданной траектории.
Регулирование. Применяется в том случае, когда имеется возможность возвратить систему на заданную траекторию. Например, студент, не сдавший экзамен, должен выучить материал по курсу.
Управление по параметрам. Осуществляется в том случае, когда невозможно задать траекторию движения управляемого объекта на весь период времени, поэтому требуется «поднастройка» системы. Например, управляющие воздействия водителя, который едет на машине по проселочной дороге.
Управление по структуре. Применяется в том случае, если ни один из параметров не обеспечивает определение траектории. В этом случае цель недостижима, и приходится менять структуру системы. Примером может служить неплатежеспособное предприятие, подлежащее реструктуризации.
Типология способов управления системно представлена на рис. 4.8.
Рис. 4.8. Классификация типов способов управления
Схематически самоуправляемая система может быть представлена моделью, изображенной на рис. 4.9.
Переменные различают по типам. Количественные переменные могут быть дискретными, непрерывными и смешанными. Качественные – имеют формализованное описание или описание содержания.
Сами операторы систем (S и C) могут соответствовать модели «черного ящика» или модели «белого ящика». Они могут быть не параметризованными, когда S и C известны частично, или параметризованными, когда их содержание известно до параметра. Операторы также могут быть и смешанными.
Для построения самоорганизуемой системы в общем виде необходимо описать природу (происхождение), типологию и внутреннюю структуру систем С и S; рассмотреть типы переменных X, Y, Z; конкретизировать тип отображения элементов между системами S и C (т. е. определить тип оператора); рассмотреть способы управления двух систем (критерии и способы получения управляющих воздействий U) и в конце выйти на задание условий получения необходимых воздействий.
Из теории систем известно, что самоуправляемые системы для достижения цели, стоящей перед ними, изменяют во времени свои параметры (в первую очередь свою структуру) не столько в результате воздействий извне, сколько путем генерирования и реализации решений внутренними подсистемами и элементами самой системы. По существу, имеет место перебор все новых и новых моделей систем до тех пор, пока не будет найдена модель системы, обеспечивающая попадание системы в заданную целевую область.
Конец бесплатного ознакомительного фрагмента