Страница:
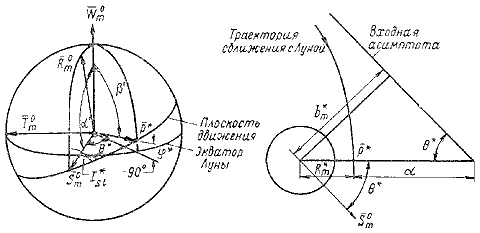
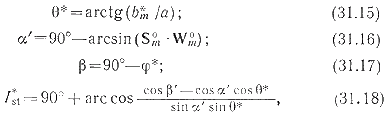
можно вычислить приблизительно требуемый угол ?* между асимптотой и радиусом-вектором перицентра. Зная асимптоту, т. е. вектор Sm* после первого приближения, а также требуемые величины ?*, Rm* и ?*, можно из геометрических соотношений представить R*m и ?* через (В.Т 0)* и (B.R0)*. Для этого рассмотрим следующие уравнения (рис. 31.6):
Так как первые вычисленные значения величин (В·Т0)* и (B-R 0)* не являются заданными, используется принцип ограничения перемещения конечной точки. Вследствие изменения входной асимптоты гиперболы изменяются также величины ?* и а. Результатом этого является медленное изменение (В·Т0)* в процессе вычислений, однако процесс быстро сходится, так что заданные величины Rm* и ?* и получаются эффективно.
Для вычисления параметров точки попадания используются формулы
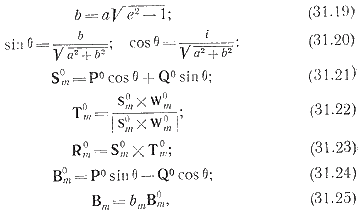
Q0 – единичный вектор скорости в периселении; Вm вектор, направленный из центра Луны перпендикулярно входной асимптоте.
Действительные лунные параметры попадания определяются как

Земные параметры попадания
Радиус наибольшего сближения с Землей RЕ также выражается через параметры попадания, чтобы гарантировать монотонность и достаточную линейность функций относительно переменных отправления от Земли. На рис. 31.8 показаны траектория возвращения к Земле и система координат для определения параметров попадания. Вектор S0E направлен приблизительно вдоль линии Луна-Земля, соответствующей моменту отправления от луны, Т0Е расположен в плоскости земного экватора, R0E дополняет систему до правой
На рис. 31.9 показаны зависимости BЕ·Т0Е и BЕ·R0Е от продолжительности активного участка ступени S=IVB и времени старта для тех же условий отправления от Земли.
Поскольку вблизи Земли ограничен лишь параметр RE,-необходима только одна компонента параметра попадания. Вычисления показывают, что при изменении каждого из трех начальных условий величина BЕ·T0Е изменяется сильнее, чем BЕ·R0Е. При определении параметра (BЕ·T0Е)* через RE* вычисления производятся по следующим формулам:
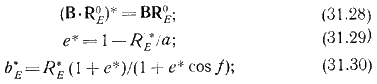 где bE* – заданная величина эллиптического параметра попадания; I*stE – заданный угол между В0E и T0E; В·T0E – заданный параметр попадания при возвращении к Земле.
где bE* – заданная величина эллиптического параметра попадания; I*stE – заданный угол между В0E и T0E; В·T0E – заданный параметр попадания при возвращении к Земле.
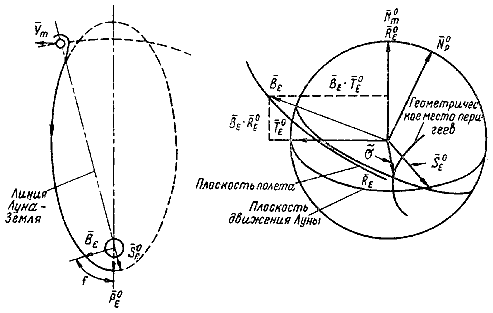 Рис. 31.8. Параметры попадания при встрече с Землей.
Рис. 31.8. Параметры попадания при встрече с Землей.
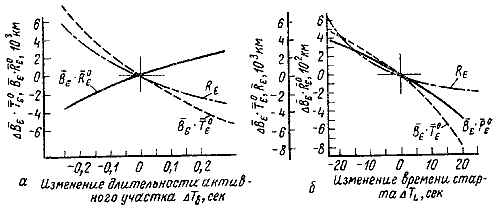 Рис. 31.9. Зависимость параметров попадания и re от изменения продолжительности активного участка и времени старта.
Рис. 31.9. Зависимость параметров попадания и re от изменения продолжительности активного участка и времени старта.
Вычисление действительных величин В·T0E и В·R0E в процессе каждой итерации производится следующим образом. В перигее заданы радиус-вектор относительно центра Земли R, вектор скорости V и большая полуось геоцентрического эллипса а. Расчет проводится по формулам
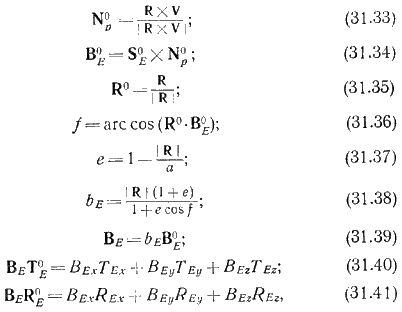 где Np0 – единичный вектор, перпендикулярный плоскости геоцентрического эллипса; f – угол между R 0 и ВE0; е – эксцентриситет геоцентрического эллипса; bE – модуль вектора B0E, направленного перпендикулярно S0E из центра Земли к действительной входной траектории; ВE, TE0, ВE, RE0 – действительные параметры попадания.
где Np0 – единичный вектор, перпендикулярный плоскости геоцентрического эллипса; f – угол между R 0 и ВE0; е – эксцентриситет геоцентрического эллипса; bE – модуль вектора B0E, направленного перпендикулярно S0E из центра Земли к действительной входной траектории; ВE, TE0, ВE, RE0 – действительные параметры попадания.
На рис. 31.9 показаны зависимости BЕ·Т0Е и BЕ·R0Е от продолжительности активного участка ступени S=IVB и времени старта для тех же условий отправления от Земли.
Поскольку вблизи Земли ограничен лишь параметр RE,-необходима только одна компонента параметра попадания. Вычисления показывают, что при изменении каждого из трех начальных условий величина BЕ·T0Е изменяется сильнее, чем BЕ·R0Е. При определении параметра (BЕ·T0Е)* через RE* вычисления производятся по следующим формулам:
Вычисление действительных величин В·T0E и В·R0E в процессе каждой итерации производится следующим образом. В перигее заданы радиус-вектор относительно центра Земли R, вектор скорости V и большая полуось геоцентрического эллипса а. Расчет проводится по формулам
Методика расчета траектории возвращения
Траектории, которые подходят к Луне по направлению движения, не гарантируют получения участка возвращения к Земле, который будет отвечать требованиям сходимости процесса расчета траекторий. Чтобы обеспечить получение траектории возвращения к Земле, в схеме расчета с использованием сфер действия вводится разрыв между окололунным и околоземным участками траектории. На каждой окололунной траектории согласно рассматриваемой схеме расчета космический корабль переводится из состояния, соответствующего действительному периселению, в требуемое состояние. После этого начинается интегрирование околоземной траектории. Разрыв исчезает при достижении сходимости. Показанные на рис. 31.7 геометрические соотношения для окололунного участка позволяют определить Rm* и ?m*. Если известны вектор Sm0 и наклонение Ist*, то требуемые значения радиуса-вектора периселения Р* и вектора скорости Q* можно вычислить по следующим формулам:
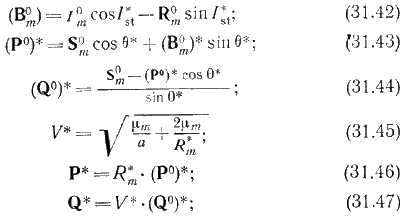 где (Р0)* и (Q0)* – соответствующие заданные единичные векторы, направленные по радиусам-векторам периселения и скорости в периселении, а V* – заданная величина скорости в периселении. [2,3, 10, 16,17.]
где (Р0)* и (Q0)* – соответствующие заданные единичные векторы, направленные по радиусам-векторам периселения и скорости в периселении, а V* – заданная величина скорости в периселении. [2,3, 10, 16,17.]
3.2. Управление траекторией полета корабля Apollo
Бортовая ЭЦВМ – главный элемент системы управления Apollo. Успех управления полетом корабля целиком зависит от эффективности работы бортовой ЭЦВМ. На любом этапе полета требуется, чтобы бортовая ЭЦВМ выполняла почти одновременно множество различных функций: ввод данных о приращении скорости, углов кардана, сигналов состояния систем, прием команд от астронавтов через пульт управления и команд с Земли и выдачу на выходе команд управления, режимов управления, цифровых сигналов, включения световых сигналов и передачу цифровой телеметрии.
Навигация и управление траекторией полета
Для определения положения и скорости корабля используются компоненты ускорения, создаваемые тягой ЖРД, измеряемые инерциальной системой вдоль трех не вращающихся осей координат.
Бортовая ЭЦВМ производит интегрирование ускорений от тяги с учетом гравитационного ускорения в реальном масштабе времени и в функции инерциального положения определяются компоненты скорости корабля. Учет гравитационных сил может быть выполнен простым методом – опережающим вычислением гравитационных ускорений. На рис. 32.1 приведены уравнения движения аппарата в сферическом гравитационном полете и дается простой расчетный алгоритм в виде дифференциальных уравнений первого порядка, с помощью которого определяются положение и скорость.
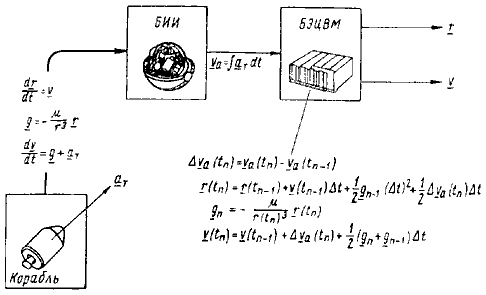 Рис. 32.1. Алгоритм расчета векторов положения г и скорости V.
Рис. 32.1. Алгоритм расчета векторов положения г и скорости V.
Так как скорость корректируется путем использования среднего эффективного гравитационного ускорения на каждом шаге интегрирования по времени, этот метод называется «методом среднего g».
Большинство орбитальных маневров может быть выполнено на основе концепции об импульсном изменении скорости. В этом случае импульсное приращение скорости определяется представлением орбиты в виде конических сечений, и кораблем следует управлять таким образом, чтобы необходимое импульсное приращение скорости сводилось к нулю.
На рис. 32.2 вектор Vr обозначает требуемую мгновенную скорость, которую должен иметь аппарат на расстоянии г, чтобы выполнить задачу полета. Разность между требуемым вектором Vr и действительным значением мгновенной скорости V есть необходимое приращение скорости Vg. Можно воспользоваться двумя законами управления, которые одновременно приводят к нулю 3 компоненты скорости Vg.
1. Можно ориентировать корабль так, чтобы ускорение от вектора тяги aт совпало с направлением Vg.
2. Так как ускорение Vg можно представить простым выражением, то ускорение от тяги aт можно ориентировать так, чтобы вектор ускорения V g стал параллелен вектору скорости Vg и направлен в противоположную сторону.
Если бы aт было недостаточно большое, было бы невозможно совместить по линии векторы Vg и Vg, однако, для кораблей с ЖРД, работающих короткий промежуток времени, такая логика управления не встречает затруднений.
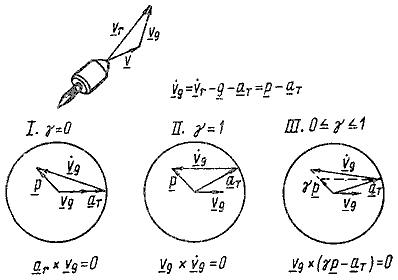 Рис. 32.2. Метод получения необходимого приращения скорости.
Рис. 32.2. Метод получения необходимого приращения скорости.
Используя оба эти закона можно осуществить весьма эффективное управление, близкое к оптимальному, получаемому методом вариационного исчисления.
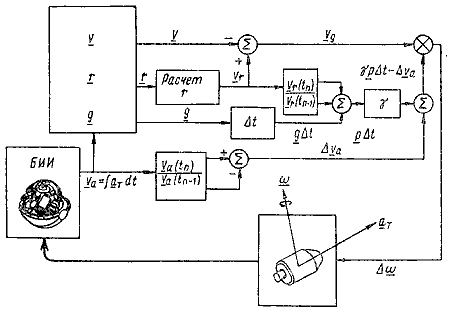 Рис. 32.3. Схема расчета сигнала коррекции ошибки управления
Рис. 32.3. Схема расчета сигнала коррекции ошибки управления
Эмпирически определяется параметр ?, минимизирующий расход топлива на маневр. Для конкретной фазы полета обычно достаточно иметь постоянное значение ?, однако, если это необходимо, ? можно представить, как функцию удобной системы переменных. Схема, иллюстрирующая расчет требуемого сигнала коррекции ошибки управления приведена на рис. 32.3. Векторы положения, скорости и гравитационного ускорения подсчитываются, как указывалось раньше. Требуемая для выполнения конкретной задачи полета импульсная скорость определяется по вектору положения и используется для расчета Vg. Точно произведенный расчет на выходе системы выдает вектор командной угловой скорости, величина которогй пропорциональна малой угловой разности между действительным и командным векторами ускорения от тяги и направление его указывает требуемое направление поворота аппарата, чтобы свести к нулю ошибку. Перед концом маневра, когда Vg мало, аппарат сохраняет постоянную ориентацию, а выключение ЖРД осуществляется по измеряемой величине вектора Vg.
Бортовая ЭЦВМ производит интегрирование ускорений от тяги с учетом гравитационного ускорения в реальном масштабе времени и в функции инерциального положения определяются компоненты скорости корабля. Учет гравитационных сил может быть выполнен простым методом – опережающим вычислением гравитационных ускорений. На рис. 32.1 приведены уравнения движения аппарата в сферическом гравитационном полете и дается простой расчетный алгоритм в виде дифференциальных уравнений первого порядка, с помощью которого определяются положение и скорость.
Так как скорость корректируется путем использования среднего эффективного гравитационного ускорения на каждом шаге интегрирования по времени, этот метод называется «методом среднего g».
Большинство орбитальных маневров может быть выполнено на основе концепции об импульсном изменении скорости. В этом случае импульсное приращение скорости определяется представлением орбиты в виде конических сечений, и кораблем следует управлять таким образом, чтобы необходимое импульсное приращение скорости сводилось к нулю.
На рис. 32.2 вектор Vr обозначает требуемую мгновенную скорость, которую должен иметь аппарат на расстоянии г, чтобы выполнить задачу полета. Разность между требуемым вектором Vr и действительным значением мгновенной скорости V есть необходимое приращение скорости Vg. Можно воспользоваться двумя законами управления, которые одновременно приводят к нулю 3 компоненты скорости Vg.
1. Можно ориентировать корабль так, чтобы ускорение от вектора тяги aт совпало с направлением Vg.
2. Так как ускорение Vg можно представить простым выражением, то ускорение от тяги aт можно ориентировать так, чтобы вектор ускорения V g стал параллелен вектору скорости Vg и направлен в противоположную сторону.
Если бы aт было недостаточно большое, было бы невозможно совместить по линии векторы Vg и Vg, однако, для кораблей с ЖРД, работающих короткий промежуток времени, такая логика управления не встречает затруднений.
Используя оба эти закона можно осуществить весьма эффективное управление, близкое к оптимальному, получаемому методом вариационного исчисления.
Эмпирически определяется параметр ?, минимизирующий расход топлива на маневр. Для конкретной фазы полета обычно достаточно иметь постоянное значение ?, однако, если это необходимо, ? можно представить, как функцию удобной системы переменных. Схема, иллюстрирующая расчет требуемого сигнала коррекции ошибки управления приведена на рис. 32.3. Векторы положения, скорости и гравитационного ускорения подсчитываются, как указывалось раньше. Требуемая для выполнения конкретной задачи полета импульсная скорость определяется по вектору положения и используется для расчета Vg. Точно произведенный расчет на выходе системы выдает вектор командной угловой скорости, величина которогй пропорциональна малой угловой разности между действительным и командным векторами ускорения от тяги и направление его указывает требуемое направление поворота аппарата, чтобы свести к нулю ошибку. Перед концом маневра, когда Vg мало, аппарат сохраняет постоянную ориентацию, а выключение ЖРД осуществляется по измеряемой величине вектора Vg.
Главные составные части системы навигации и управления полетом корабля Apollo
Главные составные части и приборы системы управления и навигации корабля Apollo: блок инерциальных измерений; астронавигационный блок оптических измерений; бортовая ЭЦВМ; пульт управления с экраном-индикатором; шаровой индикатор полета.
Блок инерциальных измерений выдает фиксированную в инерциальном пространстве систему координат и в этой системе координат осуществляет измерение компонентов ускорения аппарата.
Блок оптических измерений с помощью секстанта и сканирующего телескопа измеряет направления на звезды и позволяет точно ориентировать в инерциальном пространстве систему координат стабилизированной платформы.
Бортовая ЭЦВМ производит расчеты по навигации и управлению и выдает команды на управление полетом корабля.
Пульт управления дает возможность экипажу управлять бортовой ЭЦВМ и осуществляет обмен информацией между экипажем и бортовой ЭЦВМ.
Шаровой индикатор полета визуально отображает пространственную ориентацию и курс корабля и позволяет осуществить визуальный контроль коррекции ошибок ориентация.
Блок инерциальных измерений выдает фиксированную в инерциальном пространстве систему координат и в этой системе координат осуществляет измерение компонентов ускорения аппарата.
Блок оптических измерений с помощью секстанта и сканирующего телескопа измеряет направления на звезды и позволяет точно ориентировать в инерциальном пространстве систему координат стабилизированной платформы.
Бортовая ЭЦВМ производит расчеты по навигации и управлению и выдает команды на управление полетом корабля.
Пульт управления дает возможность экипажу управлять бортовой ЭЦВМ и осуществляет обмен информацией между экипажем и бортовой ЭЦВМ.
Шаровой индикатор полета визуально отображает пространственную ориентацию и курс корабля и позволяет осуществить визуальный контроль коррекции ошибок ориентация.
Выставка инерциальной платформы
Перед каждым маневром управления траекторией полета производится выставка инерциально стабилизированной платформы.
Выставка платформы осуществляется в 2 этапа – грубая и точная. Грубая выставка производится с использованием в бортовой ЭЦВМ известной ориентации корабля. Штурман с помощью сканирующего телескопа с широким углом обзора последовательно наблюдает 2 звезды. Найдя звезду, ручкой управления оптической системы он совмещает звезду с перекрестьем визирных линий сканирующего телескопа, нажав кнопку посылает сигнал бортовой ЭЦВМ прочитать блоку согласования данных углы звезды.
Так же измеряются углы второй звезды, расположенной на достаточно большом угловом расстоянии от первий. Таким образом определяется ориентация корабля относительно трех измерений. Далее бортовая ЭЦВМ определяет требуемые углы кардана блока инерциальных измерений и маневр, который должен быть произведен. Требуемые углы, посланные в блок инерциальных измерений через блок преобразования данных, подгоняются сервомоторами кардана блока инерциальных измерений в ответ на сигналы ошибок, вырабатываемые на угловых передачах каждой оси кардана.
Чтобы произвести точную выставку блока инерциальных измерений, штурман снова измеряет угловые координаты двух звезд, но в этом случае он пользуется секстантом с 28-кратным усилением и узким углом обзора, обеспечивающим необходимую точность измерений. Когда подается штурманом сигнал, бортовая ЭЦВМ одновременно считывает показания секстанта и углы блока инерциальных измерений, передаваемые блоком преобразования данных; по этим данным определяется направление звезды в координатах блока инерциальных измерений и может быть определена точная ориентация. Зная желаемую ориентацию, бортовая ЭЦВМ определяет ошибки существующей ориентации блока инерциальных измерений и высчитывает необходимое число гиромагнитных импульсов, посылаемых сервомотором кардана, чтобы скомпенсировать ошибки выставки инерциальной платформы.
Выставка платформы осуществляется в 2 этапа – грубая и точная. Грубая выставка производится с использованием в бортовой ЭЦВМ известной ориентации корабля. Штурман с помощью сканирующего телескопа с широким углом обзора последовательно наблюдает 2 звезды. Найдя звезду, ручкой управления оптической системы он совмещает звезду с перекрестьем визирных линий сканирующего телескопа, нажав кнопку посылает сигнал бортовой ЭЦВМ прочитать блоку согласования данных углы звезды.
Так же измеряются углы второй звезды, расположенной на достаточно большом угловом расстоянии от первий. Таким образом определяется ориентация корабля относительно трех измерений. Далее бортовая ЭЦВМ определяет требуемые углы кардана блока инерциальных измерений и маневр, который должен быть произведен. Требуемые углы, посланные в блок инерциальных измерений через блок преобразования данных, подгоняются сервомоторами кардана блока инерциальных измерений в ответ на сигналы ошибок, вырабатываемые на угловых передачах каждой оси кардана.
Чтобы произвести точную выставку блока инерциальных измерений, штурман снова измеряет угловые координаты двух звезд, но в этом случае он пользуется секстантом с 28-кратным усилением и узким углом обзора, обеспечивающим необходимую точность измерений. Когда подается штурманом сигнал, бортовая ЭЦВМ одновременно считывает показания секстанта и углы блока инерциальных измерений, передаваемые блоком преобразования данных; по этим данным определяется направление звезды в координатах блока инерциальных измерений и может быть определена точная ориентация. Зная желаемую ориентацию, бортовая ЭЦВМ определяет ошибки существующей ориентации блока инерциальных измерений и высчитывает необходимое число гиромагнитных импульсов, посылаемых сервомотором кардана, чтобы скомпенсировать ошибки выставки инерциальной платформы.
Управление полетом Apollo цифровым автопилотом
На пассивных участках траектории полета при отсутствии больших действующих на корабль сил задачей ЦАП является управление ориентацией с помощью РСУ.
Стабилизация корабля
Сохранение заданной ориентации – стабилизация корабля – осуществляется ЦАП с помощью управления соленоидными топливными клапанами ЖРД РСУ непосредственно по информации об ошибках ориентации и угловой скорости ориентации. Сигналы ошибок ориентации блока преобразования данных преобразуются из цифровой в аналоговую форму для привода стрелочных указателей ошибок ориентации на шаровом индикаторе полета.
Главным в режиме стабилизации корабля является определение ЦАП угловой скорости ориентации; от точности расчета угловой скорости зависит экономия топлива и способность системы сохранить ошибки ориентации в пределах зоны нечувствительности.
Главным в режиме стабилизации корабля является определение ЦАП угловой скорости ориентации; от точности расчета угловой скорости зависит экономия топлива и способность системы сохранить ошибки ориентации в пределах зоны нечувствительности.
Автоматическое изменение ориентации корабля
ЦАП, управляя маневром ориентации корабля Apollo, использует ту же самую логику, которая применяется на режиме стабилизации, но с дополнением команд по угловой скорости (рис. 32.4). Выработка маневра ориентации выполняется в 2 этапа. Вначале на базе текущей ориентации и требуемой, определяемой экипажем или бортовой ЭЦВМ, находится ось, относительно которой одним вращением будет достигнута требуемая ориентация. Одновременно определяется, не приведет ли рассматриваемый маневр к замыканию рамок кардана блока инерциальных измерений. Если замыкание может произойти, то оси вращения выбираются так, чтобы обойти зону замыкания. Обычно в конце необходимо сделать крен для окончания маневра. В обоих случаях результатом расчета является направление, относительно которого вращается корабль, и угол поворота.
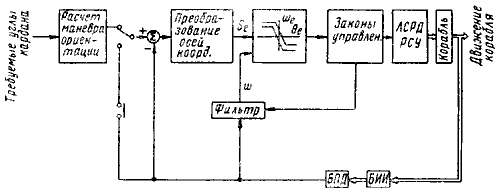 Рис. 32.4. Блок-схема цифрового автопилота, пассивный полет, управление стабилизацией корабля.
Рис. 32.4. Блок-схема цифрового автопилота, пассивный полет, управление стабилизацией корабля.
Во втором этапе расчета вырабатывается переходная матрица, равная произведению матрицы, соответствующей начальному стабилизированному положению, и трансформирующей матрицы. Это преобразование производится один раз в расчетном цикле.
Во втором этапе расчета вырабатывается переходная матрица, равная произведению матрицы, соответствующей начальному стабилизированному положению, и трансформирующей матрицы. Это преобразование производится один раз в расчетном цикле.
Управление кораблем Apollo на активном участке траектории полета
ЦАП на активных участках траектории полета вырабатывает команды на управление вектором тяги ат и осуществляет управление ориентацией корабля и вектора тяги в соответствии с вырабатываемыми командами.
Так как вектор тяги ат ориентирован в среднем вблизи продольной оси корабля, управление на активных участках сводится к управлению ориентацией корабля. Непосредственно перед включением ЖРД ЦАП с помощью ЖРД РСУ удерживает ориентацию в пределах узкой зоны нечувствительности. Предварительно ЦАП компенсирует смещение вектора тяги ЖРД, направляя ось тяги через центр тяжести корабля, определяется время зажигания ЖРД, перед зажиганием включаются ЖРД РСУ для осадки топлива в баках. С момента зажигания ЦАП управляет направлением вектора тяги, отклоняя ЖРД на кардане. ЖРД РСУ осадки топлива выключаются, когда ЖРД главной двигательной установки разовьет полную тягу.
В период действия тяги команда по угловой скорости ориентации корабля пропорциональна углу между Vg и ат (или —Vg). ЦАП вырабатывает 3 независимых сигнала ошибок ориентации и управляет тангажом, рысканием и креном корабля, сводя к нулю эти ошибки.
Управление креном осуществляется с помощью ЖРД РСУ. При управлении вектором тяги по тангажу и рысканию должны обеспечиваться стабилизация корабля, малые ошибки по скорости при выключении ЖРД, ограниченные отклонения ориентации корабля, чтобы минимизировать расход топлива и износ муфт сервомотора кардана.
На рис. 32.5 представлена блок-схема одного канала ЦАП. Для простоты считалось, что команда по угловой скорости ?с уже преобразована к координатам, связанным с аппаратом. Роль ЦАП в этом случае заключается в выполнении динамических фильтрующих операций по выбору ошибок ориентации е требуемых для выработки команд сервомотору кардана и осуществления управления по этим командам.
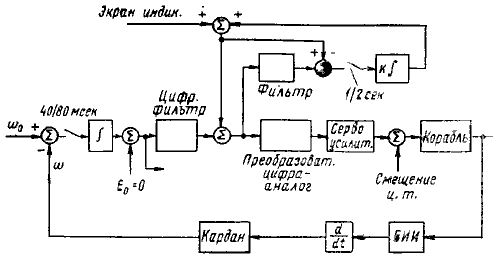 Рис. 32.5. Блок-схема цифрового автопилота, управление кораблем Apollo на активных участках траектории полета
Рис. 32.5. Блок-схема цифрового автопилота, управление кораблем Apollo на активных участках траектории полета
Так как вектор тяги ат ориентирован в среднем вблизи продольной оси корабля, управление на активных участках сводится к управлению ориентацией корабля. Непосредственно перед включением ЖРД ЦАП с помощью ЖРД РСУ удерживает ориентацию в пределах узкой зоны нечувствительности. Предварительно ЦАП компенсирует смещение вектора тяги ЖРД, направляя ось тяги через центр тяжести корабля, определяется время зажигания ЖРД, перед зажиганием включаются ЖРД РСУ для осадки топлива в баках. С момента зажигания ЦАП управляет направлением вектора тяги, отклоняя ЖРД на кардане. ЖРД РСУ осадки топлива выключаются, когда ЖРД главной двигательной установки разовьет полную тягу.
В период действия тяги команда по угловой скорости ориентации корабля пропорциональна углу между Vg и ат (или —Vg). ЦАП вырабатывает 3 независимых сигнала ошибок ориентации и управляет тангажом, рысканием и креном корабля, сводя к нулю эти ошибки.
Управление креном осуществляется с помощью ЖРД РСУ. При управлении вектором тяги по тангажу и рысканию должны обеспечиваться стабилизация корабля, малые ошибки по скорости при выключении ЖРД, ограниченные отклонения ориентации корабля, чтобы минимизировать расход топлива и износ муфт сервомотора кардана.
На рис. 32.5 представлена блок-схема одного канала ЦАП. Для простоты считалось, что команда по угловой скорости ?с уже преобразована к координатам, связанным с аппаратом. Роль ЦАП в этом случае заключается в выполнении динамических фильтрующих операций по выбору ошибок ориентации е требуемых для выработки команд сервомотору кардана и осуществления управления по этим командам.
Программа бортовой ЭЦВМ управления траекторией полета корабля Apollo
Программа бортовой ЭЦВМ управления траекторией полета ракеты-носителя Saturn V и корабля Apollo разделена на функциональные спецпрограммы в соответствии с последовательностью этапов полета на Луну: предстарт, старт, навигация, целеуказание, маневры на активных участках траектории, выставка инерциально стабилизированной платформы, вход в атмосферу, соответственно обозначаемые шифрами Р01—Р07, Р10—Р17, Р20—Р27, Р3О—Р37, Р40—Р47, Р50—Р57, Р60—Р67.
Для каждого этапа полета штурман выбирает необходимую спецпрограмму и вводит ее в бортовую ЭЦВМ, набирая соответствующий ей шифр на пульте управления.
Кроме спецпрограмм можно использовать различные алгоритмы и получить от бортовой ЭЦВМ полезную информацию о положении корабля в космическом пространстве, определить апогей и перигей орбиты, долготу, широту и высоту полета.
Программа Р40 вводится в бортовую ЭЦВМ за 5 мин до зажигания ЖРД двигательной установки служебного отсека во всех случаях, когда осуществляется маневр управления траекторией полета корабля Apollo. Точное направление вектора тяги ЖРД в начале маневра и метод осуществления маневра зависят от параметров цели, которые должны быть заранее известны.
Проблема целеуказания возникает в заданной точке космического пространства и в определенное время решается бортовой ЭЦВМ с помощью спецпрограммы Р34. Эта спецпрограмма вводится в бортовую ЭЦВМ раньше Р40. Спецпрограммой Р34 определяются потребное импульсное изменение скорости, перигейное расстояние, ожидаемый угол средней рамки кардана и выдаются экипажу заранее; кроме этого, подсчитываются расход топлива на маневр, конечная орбита и запас высоты в перигее конечной орбиты.
Перед выключением спецпрограммы Р34 и отсылкой ее в память бортовой ЭЦВМ до дальнейшего использования экипаж оценивает и одобряет полученные данные – время зажигания, продолжительность маневра и расчетный вектор промаха цели,—которые используются для расчета управления маневром.
Спецпрограмма Р40 вводится заранее, чтобы экипаж успел выполнить операции по «листу проверки», предшествующие каждому активному участку траектории.
Основное назначение спецпрограммы Р40 заключается в навигации, управлении кораблем и контроле за системами в процессе отсчета времени, зажигании и работе ЖРД, а также выключении ЖРД в конце маневра. Перед вводом спецпрограммы Р40 для работы ЦАП должны быть подготовлены следующие данные: угловая скорость, ширина зоны нечувствительности, используемые ЖРД РСУ, расчет поворота кардана ЖРД служебного отсека. Вес командного и служебного отсеков, момент инерции, момент, создаваемый ЖРД, подсчитываются и прослеживаются во время работы ЖРД.
После завершения подготовительных расчетов ЦАП подсчитывается начальное направление вектора тяги и величина необходимого изменения вектора скорости Vg; 3 компоненты вектора Vg в координатах относительно местной вертикали выдаются на приборную доску штурмана (ему предоставлено право сбросить программу, если он заметит большие ошибки в расчетах). Далее ЦАП, определяет предпочтительную ориентацию блока инерциальных измерений, при этом ось Х стабилизированной платформы направляется вдоль расчетного направления вектора тяги. Если угол средней рамки кардана превышает 45°, штурман включает программу перенастройки блока инерциальных измерений. После новой выставки блока инерциальных измерений штурман снова может включить спецпрограмму Р40.
Если закончена выставка блока инерциальных измерений ЦАП выбирает порядок маневрирования, обеспечивающий необходимое направление вектора тяги. После расчета маневра ЦАП запрашивает штурмана произвести проверку привода кардана ЖРД (для безопасности); после проверки производится триммерная подгонка углов кардана. ЦАП начинает выдавать время в минутах и секундах до начала работы ЖРД; в оставшиеся 45 сек вспыхивает сигнальная лампа и штурман, если найдет нужным, может сбросить программу. За 30 сек до зажигания спецпрограмма Р40 обращается к листу ожидающих программ, чтобы начать интегрирование по «методу среднего g». Штурман готовит двигательную установку служебного отсека, включает рубильник на главной панели и рукоятки управления на дискретный режим. ЦАП выдает команду на включение ЖРД РСУ для осадки топлива в баках. Штурман следит за изменением скорости, выдаваемой на экран-индикатор, и убеждается, что осадка происходит. За 5 сек. до зажигания штурману выдается сигнал о готовности к работе главного ЖРД и это последняя возможность сбросить выполнение маневра с работающими ЖРД.
Если принято решение продолжать полет, ЦАП включает ЖРД и одновременно изменяется режим работы ЦАП с пассивного полета на активный. ЖРД РСУ осадки топлива выключаются, как только главный ЖРД разовьет полную тягу. Экран-индикатор начинает показывать время до выключения ЖРД и Vg. Штурман следит за выполнением маневра по экрану-индикатору, убеждается в том, что оставшееся время работы ЖРД уменьшается и Vg уменьшается; по шаровому индикатору полета он следит, чтобы ошибки ориентации и скорости ориентации лежали в допустимых пределах.
Когда ЦАП определит, что целевые условия маневра достигнуты, посылается сигнал на выключение ЖРД служебного отсека, и ЦАП переключается на пассивный полет. В конце работы ЖРД на экране-индикаторе выдается остаточная скорость Vg и ее компоненты в координатах корабля. Штурман может вручную подрегулировать эти компоненты скорости с помощью рукояток управления поступательным перемещением и вращением корабля. Когда маневр закончен, ЦАП определяет параметры новой орбиты корабля, выдает эту информацию на экран-индикатор и запрашивает штурмана, перейти ли на программу холостого хода или на какую-либо другую из главных программ. [4—15, 18—20.]
Для каждого этапа полета штурман выбирает необходимую спецпрограмму и вводит ее в бортовую ЭЦВМ, набирая соответствующий ей шифр на пульте управления.
Кроме спецпрограмм можно использовать различные алгоритмы и получить от бортовой ЭЦВМ полезную информацию о положении корабля в космическом пространстве, определить апогей и перигей орбиты, долготу, широту и высоту полета.
Программа Р40 вводится в бортовую ЭЦВМ за 5 мин до зажигания ЖРД двигательной установки служебного отсека во всех случаях, когда осуществляется маневр управления траекторией полета корабля Apollo. Точное направление вектора тяги ЖРД в начале маневра и метод осуществления маневра зависят от параметров цели, которые должны быть заранее известны.
Проблема целеуказания возникает в заданной точке космического пространства и в определенное время решается бортовой ЭЦВМ с помощью спецпрограммы Р34. Эта спецпрограмма вводится в бортовую ЭЦВМ раньше Р40. Спецпрограммой Р34 определяются потребное импульсное изменение скорости, перигейное расстояние, ожидаемый угол средней рамки кардана и выдаются экипажу заранее; кроме этого, подсчитываются расход топлива на маневр, конечная орбита и запас высоты в перигее конечной орбиты.
Перед выключением спецпрограммы Р34 и отсылкой ее в память бортовой ЭЦВМ до дальнейшего использования экипаж оценивает и одобряет полученные данные – время зажигания, продолжительность маневра и расчетный вектор промаха цели,—которые используются для расчета управления маневром.
Спецпрограмма Р40 вводится заранее, чтобы экипаж успел выполнить операции по «листу проверки», предшествующие каждому активному участку траектории.
Основное назначение спецпрограммы Р40 заключается в навигации, управлении кораблем и контроле за системами в процессе отсчета времени, зажигании и работе ЖРД, а также выключении ЖРД в конце маневра. Перед вводом спецпрограммы Р40 для работы ЦАП должны быть подготовлены следующие данные: угловая скорость, ширина зоны нечувствительности, используемые ЖРД РСУ, расчет поворота кардана ЖРД служебного отсека. Вес командного и служебного отсеков, момент инерции, момент, создаваемый ЖРД, подсчитываются и прослеживаются во время работы ЖРД.
После завершения подготовительных расчетов ЦАП подсчитывается начальное направление вектора тяги и величина необходимого изменения вектора скорости Vg; 3 компоненты вектора Vg в координатах относительно местной вертикали выдаются на приборную доску штурмана (ему предоставлено право сбросить программу, если он заметит большие ошибки в расчетах). Далее ЦАП, определяет предпочтительную ориентацию блока инерциальных измерений, при этом ось Х стабилизированной платформы направляется вдоль расчетного направления вектора тяги. Если угол средней рамки кардана превышает 45°, штурман включает программу перенастройки блока инерциальных измерений. После новой выставки блока инерциальных измерений штурман снова может включить спецпрограмму Р40.
Если закончена выставка блока инерциальных измерений ЦАП выбирает порядок маневрирования, обеспечивающий необходимое направление вектора тяги. После расчета маневра ЦАП запрашивает штурмана произвести проверку привода кардана ЖРД (для безопасности); после проверки производится триммерная подгонка углов кардана. ЦАП начинает выдавать время в минутах и секундах до начала работы ЖРД; в оставшиеся 45 сек вспыхивает сигнальная лампа и штурман, если найдет нужным, может сбросить программу. За 30 сек до зажигания спецпрограмма Р40 обращается к листу ожидающих программ, чтобы начать интегрирование по «методу среднего g». Штурман готовит двигательную установку служебного отсека, включает рубильник на главной панели и рукоятки управления на дискретный режим. ЦАП выдает команду на включение ЖРД РСУ для осадки топлива в баках. Штурман следит за изменением скорости, выдаваемой на экран-индикатор, и убеждается, что осадка происходит. За 5 сек. до зажигания штурману выдается сигнал о готовности к работе главного ЖРД и это последняя возможность сбросить выполнение маневра с работающими ЖРД.
Если принято решение продолжать полет, ЦАП включает ЖРД и одновременно изменяется режим работы ЦАП с пассивного полета на активный. ЖРД РСУ осадки топлива выключаются, как только главный ЖРД разовьет полную тягу. Экран-индикатор начинает показывать время до выключения ЖРД и Vg. Штурман следит за выполнением маневра по экрану-индикатору, убеждается в том, что оставшееся время работы ЖРД уменьшается и Vg уменьшается; по шаровому индикатору полета он следит, чтобы ошибки ориентации и скорости ориентации лежали в допустимых пределах.
Когда ЦАП определит, что целевые условия маневра достигнуты, посылается сигнал на выключение ЖРД служебного отсека, и ЦАП переключается на пассивный полет. В конце работы ЖРД на экране-индикаторе выдается остаточная скорость Vg и ее компоненты в координатах корабля. Штурман может вручную подрегулировать эти компоненты скорости с помощью рукояток управления поступательным перемещением и вращением корабля. Когда маневр закончен, ЦАП определяет параметры новой орбиты корабля, выдает эту информацию на экран-индикатор и запрашивает штурмана, перейти ли на программу холостого хода или на какую-либо другую из главных программ. [4—15, 18—20.]
3.3. Наземная сеть NASA дальней космической радиосвязи и слежения за пилотируемыми кораблями
Наземная сеть дальней космической радиосвязи NASA с пилотируемыми кораблями впервые проверялась на дальность до Луны в полете Apollo-8 в декабре 1968 г. (см. рис. 33.1).
Сеть связи использует 2 ИСЗ на стационарных орбитах, 17 наземных станций, 4 морских судна с радиооборудованием, от 6 до 8 специально оборудованных самолетов для наблюдения за полетом корабля и выполнения большого объема работы по связи, телевидению и телеметрии.
Сеть спроектирована для обеспечения непрерывной связи космонавтов с Землей от старта в процессе всего полета к Луне и до посадки.
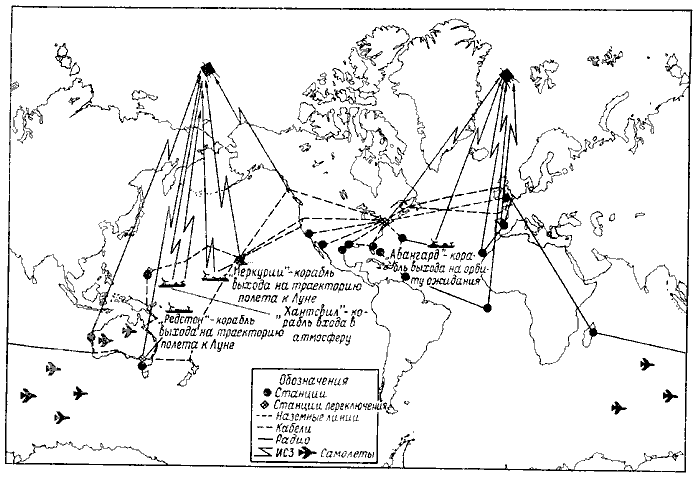 Рис. 33.1. Наземная сеть дальней космической радиосвязи NASA с пилотируемыми кораблями.
Рис. 33.1. Наземная сеть дальней космической радиосвязи NASA с пилотируемыми кораблями.
Она поддерживает тесный контакт наземного контрольного центра с кораблем Apollo и астронавтами в процессе всего полета, за исключением приблизительно 45 мин, когда Apollo, двигаясь по орбите ИСЛ, находится за Луной.
Связь с Apollo делится на 2 этапа: на первом этапе во время старта и полета по орбите ИСЗ сеть связи использует цепь станций, оборудованных 9-м антеннами; на втором этапе, когда Apollo удалится от Земли более чем на 18 000 км, связь осуществляется более мощными и более точными антеннами диаметром 26 м и 46 м.
В зависимости от азимута старта, Apollo начинает работать со станциями с 9-м антеннами на о. Меритт, Багамских о-вах, Бермудах, корабле «Авангард», Канарских о-вах, в Карнарвоне (Австралия), Гавайских о-вах, втором корабле слежения, Гуаме, Мексике и Корпус Кристи (шт. Техас).
Для выхода на траекторию полета к Луне Центр управления полетом посылает сигнал через одну из наземных станций или через один из кораблей слежения в Тихом океане. Когда Apollo возьмет курс на Луну, работа ЖРД отслеживается кораблем и самолетами. Самолеты осуществляют релейную связь для передачи голоса астронавтов и другой информации в Хьюстон.
Сеть связи использует 2 ИСЗ на стационарных орбитах, 17 наземных станций, 4 морских судна с радиооборудованием, от 6 до 8 специально оборудованных самолетов для наблюдения за полетом корабля и выполнения большого объема работы по связи, телевидению и телеметрии.
Сеть спроектирована для обеспечения непрерывной связи космонавтов с Землей от старта в процессе всего полета к Луне и до посадки.
Она поддерживает тесный контакт наземного контрольного центра с кораблем Apollo и астронавтами в процессе всего полета, за исключением приблизительно 45 мин, когда Apollo, двигаясь по орбите ИСЛ, находится за Луной.
Связь с Apollo делится на 2 этапа: на первом этапе во время старта и полета по орбите ИСЗ сеть связи использует цепь станций, оборудованных 9-м антеннами; на втором этапе, когда Apollo удалится от Земли более чем на 18 000 км, связь осуществляется более мощными и более точными антеннами диаметром 26 м и 46 м.
В зависимости от азимута старта, Apollo начинает работать со станциями с 9-м антеннами на о. Меритт, Багамских о-вах, Бермудах, корабле «Авангард», Канарских о-вах, в Карнарвоне (Австралия), Гавайских о-вах, втором корабле слежения, Гуаме, Мексике и Корпус Кристи (шт. Техас).
Для выхода на траекторию полета к Луне Центр управления полетом посылает сигнал через одну из наземных станций или через один из кораблей слежения в Тихом океане. Когда Apollo возьмет курс на Луну, работа ЖРД отслеживается кораблем и самолетами. Самолеты осуществляют релейную связь для передачи голоса астронавтов и другой информации в Хьюстон.