Страница:
Перед началом спуска с орбиты ИСЛ осуществляется начальная выставка координат аварийной системы управления по данным основной системы управления и навигации, определяется начальное значение навигационного вектора состояния и производится компенсация смещений гироскопов и акселерометров. Смещение нулей гироскопов определяется путем сравнения с данными ориентации, вырабатываемыми основной системой управления и навигации; нули акселерометров определяются по сигналам, снимаемым с чувствительных элементов аварийной системы на пассивном участке траектории. На поверхности Луны вторично производятся выставка и определение смещения нулей чувствительных элементов.
После отделения лунного корабля от командного отсека аварийная система работает в режиме дублирования основной системы управления и навигации, осуществляющей спуск корабля. В фазе торможения при заходе на посадку с работающим ЖРД, если возникнет аварийная ситуация и переход на аварийную систему управления, система должна вывести лунный корабль на безопасную орбиту и обеспечить встречу и стыковку с командным отсеком.
В условиях нормального снижения и посадки аварийная система используется для подтверждения правильности работы основной системы управления и навигадии.
В случае отказа основной системы управления после перехода на ручное управление посадкой лунного корабля аварийная система должна выдавать информацию об ориентации корабля.
Сразу же после посадки на поверхность Луны аварийная система переводится на режим расчета навигационных задач старта с Луны и встречи с командным отсеком. При нормальных условиях взлета с Луны аварийная система дублирует основную систему управления и навигации. [23.]
Оценка точности аварийной системы управления
Литература
Глава III
3.1. Прицеливание траектории полета Земля-Луна-Земля
Логика выбора времени запуска
Перелет с постоянным временем (класс 1)
Полет с изменяющимся временем (класс 2).
Исследование параметров траектории перелета
После отделения лунного корабля от командного отсека аварийная система работает в режиме дублирования основной системы управления и навигации, осуществляющей спуск корабля. В фазе торможения при заходе на посадку с работающим ЖРД, если возникнет аварийная ситуация и переход на аварийную систему управления, система должна вывести лунный корабль на безопасную орбиту и обеспечить встречу и стыковку с командным отсеком.
В условиях нормального снижения и посадки аварийная система используется для подтверждения правильности работы основной системы управления и навигадии.
В случае отказа основной системы управления после перехода на ручное управление посадкой лунного корабля аварийная система должна выдавать информацию об ориентации корабля.
Сразу же после посадки на поверхность Луны аварийная система переводится на режим расчета навигационных задач старта с Луны и встречи с командным отсеком. При нормальных условиях взлета с Луны аварийная система дублирует основную систему управления и навигации. [23.]
Оценка точности аварийной системы управления
Для оценки точности аварийной системы управления сравнивались значения параметров траектории полета корабля, определенных наземной сетью связи и слежения, основной системой управления и навигации и аварийной системой. Полученные результаты при обработке трех траекторий полетов Apollo-10, Apollo-11 и Apollo-12 хорошо согласуются между собой. Погрешность в определении аварийной системой скорости при спуске на Луну не превышает 1,2 м/сек при значении измеряемой величины до 1800 м/сек.
Литература
1. Hardy G. Н. Man's role in launch vechicle guidance and control. AIAA Paper № 69—876. ЭИ АиР, 1970, № 17; РЖ, 1970, 5.41.182
2. Kurkowski R. L., and Hardy G. Н., Gordon Н., Saturn V manual backup guidance and control piloted simulation study. NASA TN D-4481, 1968
3. Lemon R. S., and Stern A. D. Spacecraft backup guidance and control for the Saturn V launch vechicle. The Boeing Co., Doc. No D2—118176—1. Jan. 13, 1969
4. Ваlsam R. E., Anzel В. М. A simplified approach for correction of perturbations on a stationary oirbit. AIAA Paper № 68—456, (ЭИ АиР, 1969, № 7); РЖ, 1968, 12.41.47
5. Gilchrist J. D., Sоland D. E. A manual optimal guidance scheme using a predictive model. J. Spacecraft and Rockets, 1968, 5, № 10, ЭИ АиР, 1969, № 7; РЖ, 1969, 5.41.206
6. Anderson P. A., and Gilchrist J. D., Manual optimal guidance techniques. National Space Meeting of the Institute of Navigation, Feb. 20, 1968, Cocoa Beach, Fla. РЖ, 1969, 6.41.217
7. Edelbaum T. N. Minimum impulse guidance. AIAA Paper № 69—74, ЭИ АиР, 1969, № 33; РЖ, 1969, 10.41.107
8. Evans F. A., Wilcox J. C. Experimental strapdown redundant sensor inertial navigation system. AIAA Paper № 69—851, ЭИ АиР, 1970, № 13; РЖ, 1970, 5.41.224
9. Webber R. F. Performance of the lunar module, powered flight, tracking data processor during the Apollo 12 mission. AIAA Paper № 70—1020, ЭИ АиР, 1971, № 8; РЖ, 1971, 2.41.272
10. Роwers W. F., Mc Dannell J. P. Switching conditions and a synthesis technique for the singular Saturn guidance problem. AIAA Paper № 70—965, ЭИ АиР, 1971, № 15; РЖ, 1971, 3.41.59
11. Luh J. Y. S., Maguiraga M. Minimum trajectory sensitivity of a large launch booster control system. IEEE Trans. Aerospace and Electron. System., 1969, 5, № 2, ЭИ AиР, 1969, № 39; РЖ, 1969, 11.41.200
12. Horn Н. J., Chandler D. C., Buckelew V. L. Iterative guidance applied to generalized missions. J. Spacecraft and Rockets, 1969, 6, № 1, ЭИ АнР, 1969, № 39: РЖ, 1969, 10.41.264
13. Мartin F. Н., Battin R. H. Computer—controlled steering of the Apollo' spacecraft. J. Spacecraft and Rockets, 1968, 5, № 4, (ЭН АиР, 1968, № 30); РЖ, 1968, 10.41.252
14. Mc Ruer D. Т., Weir D. Н., Klein R. Н. A pilot-vehicle systems approach to longitudinal flight director design. AIAA Paper № 70—1001, (ЭИ АиР, 1971, № 13)
15. Сhen P. P. Real—time Kalman filtering of Apollo LM/AGS rendezvous radar data. AIAA Paper, № 70—957, ЭИ АиР, 1971, № 10; РЖ 1971, 2.41.273
16. Satin A. L., Рixley P. T. Statistics of state—vector corrections for Apollo onboard computers. AIAA Paper, № 70—162, ЭИ АиР 1970 № 33; РЖ, 1970, 10.41.255
17. Bielkowicz P., Horrigan R. C., Walsh R. C., Manual onboard methods of orbit determination. AIAA Paper, № 70—159, (ЭИ АиР, 1970, № 33)
18. Salinger S. N., Brandstaller J. J. Application of recursive estimation and Kalman filtering to Doppler tracking. IEEE Trans. Aerospасе and Electron. Syst, 1970, 6, № 4, ЭИ АиР, 1970. № 45; РЖ, 1970, 12.41.220
19. Cox K. J. Apollo reaction control systems. IEEE Transection automatic control,IEEE №9C41-AC, Aug.4, 1969
20. Stubbs G.S., Penchuk A., Schlundt R.W Digital autopilot for thrust vector control of the Apollo CSM and CSM/LM vehicles. AIAA Paper № 69—847
21. Miller J. E., Laats Ain. Apollo guidance and control system flight experience. AIAA Paper № 69—891
22. Stengel R. F. Manual attitude control of the Lunar Module. AIAA Paper № 69—892
23. Mason W. L., Wedekind D. E. Prediction and measurement of strap-down inertial measurement unit performence on lunar missions. AIAA Paper № 70—1028
2. Kurkowski R. L., and Hardy G. Н., Gordon Н., Saturn V manual backup guidance and control piloted simulation study. NASA TN D-4481, 1968
3. Lemon R. S., and Stern A. D. Spacecraft backup guidance and control for the Saturn V launch vechicle. The Boeing Co., Doc. No D2—118176—1. Jan. 13, 1969
4. Ваlsam R. E., Anzel В. М. A simplified approach for correction of perturbations on a stationary oirbit. AIAA Paper № 68—456, (ЭИ АиР, 1969, № 7); РЖ, 1968, 12.41.47
5. Gilchrist J. D., Sоland D. E. A manual optimal guidance scheme using a predictive model. J. Spacecraft and Rockets, 1968, 5, № 10, ЭИ АиР, 1969, № 7; РЖ, 1969, 5.41.206
6. Anderson P. A., and Gilchrist J. D., Manual optimal guidance techniques. National Space Meeting of the Institute of Navigation, Feb. 20, 1968, Cocoa Beach, Fla. РЖ, 1969, 6.41.217
7. Edelbaum T. N. Minimum impulse guidance. AIAA Paper № 69—74, ЭИ АиР, 1969, № 33; РЖ, 1969, 10.41.107
8. Evans F. A., Wilcox J. C. Experimental strapdown redundant sensor inertial navigation system. AIAA Paper № 69—851, ЭИ АиР, 1970, № 13; РЖ, 1970, 5.41.224
9. Webber R. F. Performance of the lunar module, powered flight, tracking data processor during the Apollo 12 mission. AIAA Paper № 70—1020, ЭИ АиР, 1971, № 8; РЖ, 1971, 2.41.272
10. Роwers W. F., Mc Dannell J. P. Switching conditions and a synthesis technique for the singular Saturn guidance problem. AIAA Paper № 70—965, ЭИ АиР, 1971, № 15; РЖ, 1971, 3.41.59
11. Luh J. Y. S., Maguiraga M. Minimum trajectory sensitivity of a large launch booster control system. IEEE Trans. Aerospace and Electron. System., 1969, 5, № 2, ЭИ AиР, 1969, № 39; РЖ, 1969, 11.41.200
12. Horn Н. J., Chandler D. C., Buckelew V. L. Iterative guidance applied to generalized missions. J. Spacecraft and Rockets, 1969, 6, № 1, ЭИ АнР, 1969, № 39: РЖ, 1969, 10.41.264
13. Мartin F. Н., Battin R. H. Computer—controlled steering of the Apollo' spacecraft. J. Spacecraft and Rockets, 1968, 5, № 4, (ЭН АиР, 1968, № 30); РЖ, 1968, 10.41.252
14. Mc Ruer D. Т., Weir D. Н., Klein R. Н. A pilot-vehicle systems approach to longitudinal flight director design. AIAA Paper № 70—1001, (ЭИ АиР, 1971, № 13)
15. Сhen P. P. Real—time Kalman filtering of Apollo LM/AGS rendezvous radar data. AIAA Paper, № 70—957, ЭИ АиР, 1971, № 10; РЖ 1971, 2.41.273
16. Satin A. L., Рixley P. T. Statistics of state—vector corrections for Apollo onboard computers. AIAA Paper, № 70—162, ЭИ АиР 1970 № 33; РЖ, 1970, 10.41.255
17. Bielkowicz P., Horrigan R. C., Walsh R. C., Manual onboard methods of orbit determination. AIAA Paper, № 70—159, (ЭИ АиР, 1970, № 33)
18. Salinger S. N., Brandstaller J. J. Application of recursive estimation and Kalman filtering to Doppler tracking. IEEE Trans. Aerospасе and Electron. Syst, 1970, 6, № 4, ЭИ АиР, 1970. № 45; РЖ, 1970, 12.41.220
19. Cox K. J. Apollo reaction control systems. IEEE Transection automatic control,IEEE №9C41-AC, Aug.4, 1969
20. Stubbs G.S., Penchuk A., Schlundt R.W Digital autopilot for thrust vector control of the Apollo CSM and CSM/LM vehicles. AIAA Paper № 69—847
21. Miller J. E., Laats Ain. Apollo guidance and control system flight experience. AIAA Paper № 69—891
22. Stengel R. F. Manual attitude control of the Lunar Module. AIAA Paper № 69—892
23. Mason W. L., Wedekind D. E. Prediction and measurement of strap-down inertial measurement unit performence on lunar missions. AIAA Paper № 70—1028
Глава III
Траектории, управление, навигация, радиосвязь, аварийное возвращение
3.1. Прицеливание траектории полета Земля-Луна-Земля
Задача прицеливания на траектории выведения к Луне состоит в определении параметров старта с Земли и участка разгона с околоземной орбиты (независимые переменные) для заданного набора параметров прицеливания (зависимые переменные). Параметрами прицеливания являются радиус периселения окололунной траектории Rm, ширина периселения в лунной системе координат Lm и высота условного перицентра траектории возвращения RE. В качестве трех независимых переменных рассматриваются время старта Tl, продолжительность движения на промежуточной околоземной орбите tc и удельная энергия на траектории к Луне С3. Эти переменные, будучи определенными с помощью итеративного процесса, устанавливают 3 важных зависимых параметра задачи: время старта для заданного азимута, время до второго включения ступени S-IVB при разгоне с околоземной орбиты (на втором или третьем обороте) и удвоенную удельную энергию эллиптической траектории полета к Луне.
При вычислении независимых переменных используется метод Ньютона-Рафсона для системы нелинейных уравнений. Линеаризованные уравнения, записанные в матричной форме, имеют следующий вид:
Для заданного азимута запуска траектория выведения на орбиту ИСЗ оптимизируется независимо от расположения Земли и Луны. Однако участок разгона с орбиты зависит от расположения Земли и Луны, которое определяет требования к изменению плоскости движения при втором запуске ступени S-IVB. Поэтому участок выведения на траекторию полета к Луне должен оптимизироваться совместно с определением независимых переменных. Схема, выбранная для вычислительной программы прицеливания ракеты-носителя на участке выведения к Луне, основана на аппроксимации по методу наименьших квадратов оптимальных параметров активного участка полета ступени S-IVB, выражаемых через параметры гиперповерхности. Это позволяет независимо оптимизировать выведение на траекторию полета к Луне в процессе итерационного вычисления зависимых переменных. Гиперповерхность, показанная на рис. 31.1, образована путем состыковки конических сечений для двух притягивающих центров.
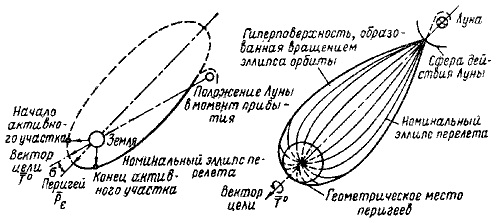 Рис. 31.1. Гиперповерхность траекторий полета к Луне
Рис. 31.1. Гиперповерхность траекторий полета к Луне
Она представляет собой семейство конических сечений, которые начинаются у Земли и заканчиваются вблизи сферы действия Луны. Гиперповерхность определяют следующие параметры: вектор цели Т°, удвоенная удельная энергия С3, угол между вектором цели и радиусом-вектором перигея ?.
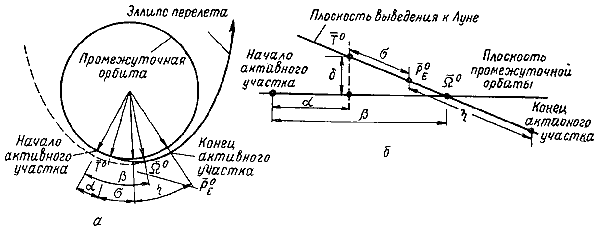 Рис. 31.2. Параметры участка выведения на траекторию полета к Луне: а – вид в плоскости выведения; б – проекция на плоскость, перпендикулярную плоскости выведения
Рис. 31.2. Параметры участка выведения на траекторию полета к Луне: а – вид в плоскости выведения; б – проекция на плоскость, перпендикулярную плоскости выведения
Параметры гиперповерхности используются в качестве независимых переменных полиномов, описывающих активный участок ступени S-IVB. С помощью этих полиномов определяются параметры участка выведения к Луне и вектора состояния. На рис. 31.2 показаны участок выведения и геометрические соотношения для определения гиперповерхности.
При использовании полиномов необходимо знать удельную энергию на траектории к Луне С3, угол между вектором цели и радиусом-вектором перигея ?, а также склонение вектора цели относительно плоскости промежуточной орбиты ?. С помощью полиномов вычисляются параметры: ? – угол между радиусом-вектором точки начала выведения и проекцией вектора цели на плоскость промежуточной орбиты (Т'); ? – угол между радиусом-вектором точки начала выведения и узлом орбиты (?); ? —истинная аномалия радиуса-вектора точки конца выведения; Rp – радиус перигея участка выведения к Луне. Параметры ?, ?, ? и Rp задают вектор состояния участка выведения.
В системе уравнений указанные величины используются для определения параметров активного участка и вычисления переменных, соответствующих моменту выключения двигателя. По полиномам также вычисляется приращение характеристикой скорости ?V при повторном включении ступени S-IVB. Величина этого приращения необходима для определения веса аппарата и времени работы двигателя. Из-за неточности учета влияния сжатия Земли и модели изменения тяги расчеты по полиномам не совпадают с результатами оптимизации активного участка методом вариационного исчисления на основе ожидаемых параметров отлета от Земли. Поэтому полиномы тарируются, чтобы обеспечить данные, точно совпадающие с результатами расчета активного участка методом вариационного исчисления. Постоянные поправочные члены, необходимые для тарировки, вычисляются как разница между результатами расчета методом вариационного исчисления и величинами, полученными путем оценки полиномов в первом приближении при С3=С3g (где C3g – приближенное значение), ?=0 (компланарный случай) и ?=6°:
 где индекс «вар» относится к результатам расчета методом вариационного исчисления.
где индекс «вар» относится к результатам расчета методом вариационного исчисления.
В компланарном случае ?=?+? и ??=??. Указанные поправочные члены получены для обеих возможностей запуска и должны использоваться всякий раз, когда параметры активного участка вычисляются по аппроксимирующим полиномам. Полиномы для участка выведения к Луне тарируются путем добавления вычисленных поправочных членов к приближенным величинам, полученным при подстановке в полиномы текущих величин С3, ? и ?.
Полином, определяющий величину ?V при втором включении ступени S-IVB, не тарируется. Однако при каждом расчете по полиному вычисляется разница между компланарным значением ?V, основанным на параметрах первого приближения (C3g, ?=0, ?=6°), и значением ?V, определяемым текущими величинами указанных параметров:
При вычислении независимых переменных используется метод Ньютона-Рафсона для системы нелинейных уравнений. Линеаризованные уравнения, записанные в матричной форме, имеют следующий вид:
где [X] —вектор-столбец поправок ?Хj к независимым переменным; [В] – вектор-столбец ошибок зависимых переменных (Yi—Yi); .[А]—якобиан (матрица частных производных ошибок зависимых переменных по поправкам, dYi/dXi).[А][Х]=[В],
Для заданного азимута запуска траектория выведения на орбиту ИСЗ оптимизируется независимо от расположения Земли и Луны. Однако участок разгона с орбиты зависит от расположения Земли и Луны, которое определяет требования к изменению плоскости движения при втором запуске ступени S-IVB. Поэтому участок выведения на траекторию полета к Луне должен оптимизироваться совместно с определением независимых переменных. Схема, выбранная для вычислительной программы прицеливания ракеты-носителя на участке выведения к Луне, основана на аппроксимации по методу наименьших квадратов оптимальных параметров активного участка полета ступени S-IVB, выражаемых через параметры гиперповерхности. Это позволяет независимо оптимизировать выведение на траекторию полета к Луне в процессе итерационного вычисления зависимых переменных. Гиперповерхность, показанная на рис. 31.1, образована путем состыковки конических сечений для двух притягивающих центров.
Она представляет собой семейство конических сечений, которые начинаются у Земли и заканчиваются вблизи сферы действия Луны. Гиперповерхность определяют следующие параметры: вектор цели Т°, удвоенная удельная энергия С3, угол между вектором цели и радиусом-вектором перигея ?.
Параметры гиперповерхности используются в качестве независимых переменных полиномов, описывающих активный участок ступени S-IVB. С помощью этих полиномов определяются параметры участка выведения к Луне и вектора состояния. На рис. 31.2 показаны участок выведения и геометрические соотношения для определения гиперповерхности.
При использовании полиномов необходимо знать удельную энергию на траектории к Луне С3, угол между вектором цели и радиусом-вектором перигея ?, а также склонение вектора цели относительно плоскости промежуточной орбиты ?. С помощью полиномов вычисляются параметры: ? – угол между радиусом-вектором точки начала выведения и проекцией вектора цели на плоскость промежуточной орбиты (Т'); ? – угол между радиусом-вектором точки начала выведения и узлом орбиты (?); ? —истинная аномалия радиуса-вектора точки конца выведения; Rp – радиус перигея участка выведения к Луне. Параметры ?, ?, ? и Rp задают вектор состояния участка выведения.
В системе уравнений указанные величины используются для определения параметров активного участка и вычисления переменных, соответствующих моменту выключения двигателя. По полиномам также вычисляется приращение характеристикой скорости ?V при повторном включении ступени S-IVB. Величина этого приращения необходима для определения веса аппарата и времени работы двигателя. Из-за неточности учета влияния сжатия Земли и модели изменения тяги расчеты по полиномам не совпадают с результатами оптимизации активного участка методом вариационного исчисления на основе ожидаемых параметров отлета от Земли. Поэтому полиномы тарируются, чтобы обеспечить данные, точно совпадающие с результатами расчета активного участка методом вариационного исчисления. Постоянные поправочные члены, необходимые для тарировки, вычисляются как разница между результатами расчета методом вариационного исчисления и величинами, полученными путем оценки полиномов в первом приближении при С3=С3g (где C3g – приближенное значение), ?=0 (компланарный случай) и ?=6°:
В компланарном случае ?=?+? и ??=??. Указанные поправочные члены получены для обеих возможностей запуска и должны использоваться всякий раз, когда параметры активного участка вычисляются по аппроксимирующим полиномам. Полиномы для участка выведения к Луне тарируются путем добавления вычисленных поправочных членов к приближенным величинам, полученным при подстановке в полиномы текущих величин С3, ? и ?.
Полином, определяющий величину ?V при втором включении ступени S-IVB, не тарируется. Однако при каждом расчете по полиному вычисляется разница между компланарным значением ?V, основанным на параметрах первого приближения (C3g, ?=0, ?=6°), и значением ?V, определяемым текущими величинами указанных параметров:
?(?V) =?V(C3, ?, ?)—?V(C3g, ?=0, ?=6°).
Логика выбора времени запуска
При планировании задачи полета на Луну определенное преимущество достигается в случае двух возможностей отлета с околоземной орбиты. Вторая возможность появляется приблизительно через 90 мин после первой (т. е. через один оборот на промежуточной орбите ИСЗ) и оказывается полезной в тех случаях, когда не все системы ракеты-носителя и космического корабля проверены и готовы к повторному включению двигателя для выведения на траекторию полета к Луне. В процессе подготовки полета принимается решение о том, сохранять ли время перелета к Луне для второй возможности таким же, какое требовалось для первой (класс 1) или уменьшить время полета для второй возможности на 90 мин (класс 2). Уменьшение времени перелета на 90 мин при использовании второй возможности позволяет сохранить время прибытия к Луне приблизительно таким же, как для первой возможности.
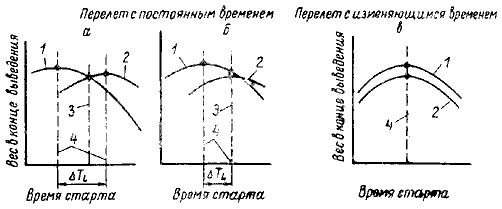 Рис. 31.3. Выбор компромиссного времени старта: 1 – первая возможность; 2 – вторая возможность; 3 – компромиссное время старта; 4 – моменты времени, соответствующие компланарному выведению
Рис. 31.3. Выбор компромиссного времени старта: 1 – первая возможность; 2 – вторая возможность; 3 – компромиссное время старта; 4 – моменты времени, соответствующие компланарному выведению
В процессе прицеливания ракеты-носителя и выбора времени запуска исследуются оба класса перелетов с целью получения максимального веса на траектории к Луне для обеих возможностей запуска. Рис. 31.3 иллюстрирует логику выбора времени запуска для двух рассматриваемых классов.
В процессе прицеливания ракеты-носителя и выбора времени запуска исследуются оба класса перелетов с целью получения максимального веса на траектории к Луне для обеих возможностей запуска. Рис. 31.3 иллюстрирует логику выбора времени запуска для двух рассматриваемых классов.
Перелет с постоянным временем (класс 1)
Вектор цели для компланарной траектории расположен в плоскости второго активного участка (т. е. ?=0), и в процессе выведения к Луне никакого изменения плоскости движения не совершается. Это справедливо для обеих возможностей запуска при компланарных траекториях перелета. Однако, пока ракета-носитель и космический корабль находятся на промежуточной орбите в ожидании второй возможности старта, Луна продолжает двигаться по орбите вокруг Земли в течение дополнительных 90 мин, что приводит к изменению вектора цели. На рис. 31.4 показано перемещение вектора цели,
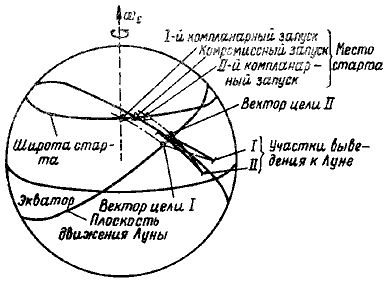 Рис. 31.4. Компромиссная траектория выведения
Рис. 31.4. Компромиссная траектория выведения
обусловленное движением Луны, от первой до второй возможности запуска, а также соответствующие моменты старта. Если рассматриваются 2 возможности выведения к Луне, то следует определить общее компромиссное время запуска. По крайней мере для одной из возможностей потребуется выполнить маневр по изменению плоскости движения, так как общее время запуска может удовлетворять условию ?=0 только для одной возможности. На рис. 31.3 показано изменение веса на траектории к Луне и времени запуска для обеих возможностей выведения. Максимальный вес обеспечивается, когда время запуска соответствует компланарному перелету, однако при второй возможности перелета вес оказывается меньше, чем при первой вследствие дренажа газообразного водорода из бака в течение дополнительного оборота на промежуточной орбите. Как видно из графиков, представленных на рис. 31.3, существует только одно время запуска, которое позволяет получить одинаковый вес на траектории к Луне для обеих возможностей. В случае а точка одинакового веса (точка пересечения кривых) расположена между временами двух компланарных запусков. Время запуска, позволяющее получить одинаковую полезную нагрузку, является общим для обеих возможностей и называется здесь компромиссным временем. В случае б точка пересечения двух кривых расположена правее времени компланарного запуска для второй возможности. Это имеет место, когда время между первой и второй возможностями оптимального запуска (?TL) мало. В случае б оптимальным решением для обеих возможностей запуска является время, соответствующее второму компланарному запуску. Процедура выбора компромиссного времени запуска состоит в следующем:
1) рассчитывается траектория для второй возможности компланарного запуска; 2) вычисляется вектор цели для первой возможности компланарного запуска; 3) определяется ?TL; 4) находится компромиссное время запуска, основанное на векторах цели для первой и второй возможностей компланарного запуска.
Отвечающее требованиям прицеливания приближенное значение вектора цели для первой возможности запуска (шаг 2 процедуры) можно вычислить без интегрирования траектории.
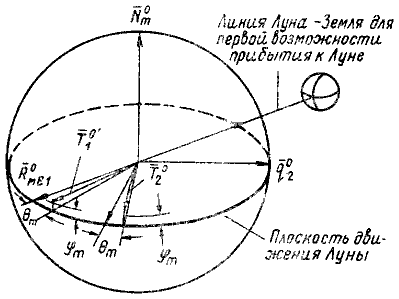 Рис. 31.5. К расчету времени старта для первой возможности.
Рис. 31.5. К расчету времени старта для первой возможности.
При этом с помощью системы координат, связанной с плоскостью движения Луны (рис. 31.5), предварительно устанавливается соотношение между вектором цели для второй возможности запуска Т02 и положением линии Луна-Земля в момент, соответствующий прибытию в периселений. Методика вычислений состоит в следующем. Даны величины: R0ME2 – единичный вектор, направленный по линии Луна-Землд в момент прибытия в периселений по компланарной траектории, соответствующей второй возможности запуска и использованию времени для второй компланарной траектории; Т02 – вектор цели для второй возможности компланарного запуска; N0m – единичный вектор, перпендикулярный плоскости движения Луны. Рассмотрим следующие уравнения:
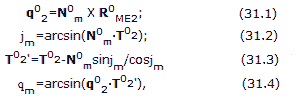 где ?m – единичный вектор, дополняющий N0m и R0ME2 до правой ортогональной системы координат,: ??m – склонение вектора цели Т02 относительно плоскости движения; Т02 – проекция вектора цели на плоскость движения Луны; ?m – прямое восхождение вектора Т02, измеряемое в плоскости движения Луны от линии Луна-Земля, соответствующей моменту прибытия в периселений по второй возможной компланарной траектории.
где ?m – единичный вектор, дополняющий N0m и R0ME2 до правой ортогональной системы координат,: ??m – склонение вектора цели Т02 относительно плоскости движения; Т02 – проекция вектора цели на плоскость движения Луны; ?m – прямое восхождение вектора Т02, измеряемое в плоскости движения Луны от линии Луна-Земля, соответствующей моменту прибытия в периселений по второй возможной компланарной траектории.
Предполагается, что вектор цели остается на постоянных угловых расстояниях ?m и ?m от линии Луна-Земля. Если выведение к Луне происходит при первой возможности, а запуск имеет место во время, соответствующее второй возможной компланарной траектории, то положение линии Луна-Земля в момент прибытия в периселений определяется посредством выбора эфемериды, которая сдвинута назад относительно момента прибытия на один период обращения по промежуточной орбите. Вектор цели вычисляется на угловых расстояниях ?m и ?m от результирующего положения линии Луна-Земля, как показано на рис. 31.5. Кроме того отыскивается вектор цели, соответствующий времени первого возможного компланарного запуска, причем должно учитываться дополнительное влияние ?TL. В первом приближении вектор цели Т02' вычисляется без учета влияния ?TL:
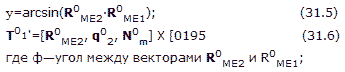
 Склонение и прямое восхождение Т01 определяется как
Склонение и прямое восхождение Т01 определяется как
 При вычислении вектора цели Т01 будем рассматривать его в качестве функции от ?TL с тем, чтобы можно было применить итерационную процедуру для обеспечения перпендикулярности вектора цели Т01 и нормали к плоскости промежуточной орбиты в случае первой возможности запуска N01 , т. е. совпадения плоскости перелета и промежуточной орбиты. Из уравнения (31.6) при ?TL=0 в первом приближении определяется вектор цели для первой возможности компланарного запуска. Принимая линейную зависимость прямого восхождения и склонения от ?TL, можно получить уравнения для вычисления этих углов по следующим формулам:
При вычислении вектора цели Т01 будем рассматривать его в качестве функции от ?TL с тем, чтобы можно было применить итерационную процедуру для обеспечения перпендикулярности вектора цели Т01 и нормали к плоскости промежуточной орбиты в случае первой возможности запуска N01 , т. е. совпадения плоскости перелета и промежуточной орбиты. Из уравнения (31.6) при ?TL=0 в первом приближении определяется вектор цели для первой возможности компланарного запуска. Принимая линейную зависимость прямого восхождения и склонения от ?TL, можно получить уравнения для вычисления этих углов по следующим формулам:
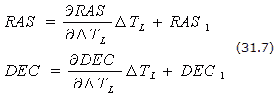 Остальные уравнения, используемые в итерационной процедуре, представлены ниже
Остальные уравнения, используемые в итерационной процедуре, представлены ниже
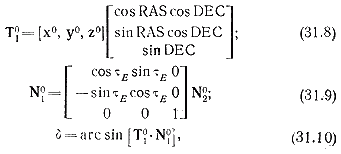 где х 0, у 0, z 0 – единичные векторы системы координат, соответствующей началу ближайшего бесселева года;
где х 0, у 0, z 0 – единичные векторы системы координат, соответствующей началу ближайшего бесселева года;
 R – прецессия за один период обращения на промежуточной орбите; RE – экваториальный радиус Земли; Rp0 – параметр орбиты; J – коэффициент, учитывающий сжатие Земли и отношение центробежного ускорения к гравитационному на экваторе.
R – прецессия за один период обращения на промежуточной орбите; RE – экваториальный радиус Земли; Rp0 – параметр орбиты; J – коэффициент, учитывающий сжатие Земли и отношение центробежного ускорения к гравитационному на экваторе.
Величины для определения производной д?/д?TL вычисляются путем решения уравнений (31.7)—(31.10) при ?TL=0 и 60 сек. При вычислении д?/д?TL принимается линейное соотношение между ? и ?TL. Уравнения (31.7) и (31.10) образуют итерационный контур, из которого можно определить величину ?TL удовлетворяющую условию ?=0. Когда условие ?=0 выполнено, текущее значение ?TL представляет собой время между моментами компланарных запусков для двух возможностей, как показано на рис. 31.3 (в случаях а и б). Текущее значение Т°1 является вектором цели для первой возможности компланарного запуска. Когда необходимо, эти величины затем используются при определении компромиссного времени запуска.
Зависимости параметров активного участка в виде полиномов используются при вычислении веса в конце участка выведения к Луне для первой возможности запуска, осуществляемого в момент времени, соответствующий второй возможности компланарного запуска. Для вектора Т°1 вычисляется угол наклона ? к плоскости промежуточной орбиты, а значения С3 и ? приравниваются к величинам, полученным из исследования второй возможности компланарного запуска и гиперповерхности. Результирующий вес W1 сравнивается с полученным ранее весом для второй возможности компланарного запуска W2. Если W1+23 Kг ?W2, то в качестве общего времени запуска используется время, соответствующее второй возможности компланарного запуска. Если же W1+23 кг<W2, то вычисляется компромиссное время запуска.
Для определения компромиссного времени запуска применяется метод последовательных приближений. При этом производится варьирование ориентации плоскости промежуточной орбиты в инерциальном пространстве между векторами Т°1 и Т°2 таким образом, чтобы изменение плоскости движения приводило к получению одинакового веса в конце участка выведения для обеих возможностей запуска. Требуемая ориентация плоскости промежуточной орбиты соответствует компромиссному времени запуска и достигается путем варьирования N°1 и N°2 от исходных положений. Вектор N°2 варьируется посредством уменьшения времени запуска на величину ?Ts (измеряемую от времени второй возможности компланарного запуска), а вектор N°1 – путем увеличения времени запуска соответственно на ?TL—?Ts. Величина ?Tsизменяется до тех пор, пока веса в конце участков выведения для первой и второй возможностей запуска не станут равными. Для получения компромиссного времени запуска текущая величияа ?Ts вычитается затем из времени соответствующего второй возможности компланарного запуска.
Ошибка при определении компромиссного времени запуска описанным выше способом может достигать ~20 сек. Однако это время отвечает требованиям проведения итерационных расчетов, связанных с изменением плоскости движения при первой и второй возможностях запуска. После проведения этих расчетов полученные векторы цели, которые принадлежат гиперповерхности, соответствующей изменению плоскости движения, используются для расчета второго приближения компромиссного времени запуска. Нормальные к плоскости промежуточной орбиты векторы снова варьируются, чтобы уравнять веса на траектории полета к Луне. Использование скорректированного компромиссного времени запуска в программе моделирования активного участка показало достаточную точность процедуры уравнивания весов. Это приводило к незначительному расходу топлива на коррекцию среднего участка траектории, связанную с использованием времени запуска, отличающегося от запланированного.
обусловленное движением Луны, от первой до второй возможности запуска, а также соответствующие моменты старта. Если рассматриваются 2 возможности выведения к Луне, то следует определить общее компромиссное время запуска. По крайней мере для одной из возможностей потребуется выполнить маневр по изменению плоскости движения, так как общее время запуска может удовлетворять условию ?=0 только для одной возможности. На рис. 31.3 показано изменение веса на траектории к Луне и времени запуска для обеих возможностей выведения. Максимальный вес обеспечивается, когда время запуска соответствует компланарному перелету, однако при второй возможности перелета вес оказывается меньше, чем при первой вследствие дренажа газообразного водорода из бака в течение дополнительного оборота на промежуточной орбите. Как видно из графиков, представленных на рис. 31.3, существует только одно время запуска, которое позволяет получить одинаковый вес на траектории к Луне для обеих возможностей. В случае а точка одинакового веса (точка пересечения кривых) расположена между временами двух компланарных запусков. Время запуска, позволяющее получить одинаковую полезную нагрузку, является общим для обеих возможностей и называется здесь компромиссным временем. В случае б точка пересечения двух кривых расположена правее времени компланарного запуска для второй возможности. Это имеет место, когда время между первой и второй возможностями оптимального запуска (?TL) мало. В случае б оптимальным решением для обеих возможностей запуска является время, соответствующее второму компланарному запуску. Процедура выбора компромиссного времени запуска состоит в следующем:
1) рассчитывается траектория для второй возможности компланарного запуска; 2) вычисляется вектор цели для первой возможности компланарного запуска; 3) определяется ?TL; 4) находится компромиссное время запуска, основанное на векторах цели для первой и второй возможностей компланарного запуска.
Отвечающее требованиям прицеливания приближенное значение вектора цели для первой возможности запуска (шаг 2 процедуры) можно вычислить без интегрирования траектории.
При этом с помощью системы координат, связанной с плоскостью движения Луны (рис. 31.5), предварительно устанавливается соотношение между вектором цели для второй возможности запуска Т02 и положением линии Луна-Земля в момент, соответствующий прибытию в периселений. Методика вычислений состоит в следующем. Даны величины: R0ME2 – единичный вектор, направленный по линии Луна-Землд в момент прибытия в периселений по компланарной траектории, соответствующей второй возможности запуска и использованию времени для второй компланарной траектории; Т02 – вектор цели для второй возможности компланарного запуска; N0m – единичный вектор, перпендикулярный плоскости движения Луны. Рассмотрим следующие уравнения:
Предполагается, что вектор цели остается на постоянных угловых расстояниях ?m и ?m от линии Луна-Земля. Если выведение к Луне происходит при первой возможности, а запуск имеет место во время, соответствующее второй возможной компланарной траектории, то положение линии Луна-Земля в момент прибытия в периселений определяется посредством выбора эфемериды, которая сдвинута назад относительно момента прибытия на один период обращения по промежуточной орбите. Вектор цели вычисляется на угловых расстояниях ?m и ?m от результирующего положения линии Луна-Земля, как показано на рис. 31.5. Кроме того отыскивается вектор цели, соответствующий времени первого возможного компланарного запуска, причем должно учитываться дополнительное влияние ?TL. В первом приближении вектор цели Т02' вычисляется без учета влияния ?TL:
Величины для определения производной д?/д?TL вычисляются путем решения уравнений (31.7)—(31.10) при ?TL=0 и 60 сек. При вычислении д?/д?TL принимается линейное соотношение между ? и ?TL. Уравнения (31.7) и (31.10) образуют итерационный контур, из которого можно определить величину ?TL удовлетворяющую условию ?=0. Когда условие ?=0 выполнено, текущее значение ?TL представляет собой время между моментами компланарных запусков для двух возможностей, как показано на рис. 31.3 (в случаях а и б). Текущее значение Т°1 является вектором цели для первой возможности компланарного запуска. Когда необходимо, эти величины затем используются при определении компромиссного времени запуска.
Зависимости параметров активного участка в виде полиномов используются при вычислении веса в конце участка выведения к Луне для первой возможности запуска, осуществляемого в момент времени, соответствующий второй возможности компланарного запуска. Для вектора Т°1 вычисляется угол наклона ? к плоскости промежуточной орбиты, а значения С3 и ? приравниваются к величинам, полученным из исследования второй возможности компланарного запуска и гиперповерхности. Результирующий вес W1 сравнивается с полученным ранее весом для второй возможности компланарного запуска W2. Если W1+23 Kг ?W2, то в качестве общего времени запуска используется время, соответствующее второй возможности компланарного запуска. Если же W1+23 кг<W2, то вычисляется компромиссное время запуска.
Для определения компромиссного времени запуска применяется метод последовательных приближений. При этом производится варьирование ориентации плоскости промежуточной орбиты в инерциальном пространстве между векторами Т°1 и Т°2 таким образом, чтобы изменение плоскости движения приводило к получению одинакового веса в конце участка выведения для обеих возможностей запуска. Требуемая ориентация плоскости промежуточной орбиты соответствует компромиссному времени запуска и достигается путем варьирования N°1 и N°2 от исходных положений. Вектор N°2 варьируется посредством уменьшения времени запуска на величину ?Ts (измеряемую от времени второй возможности компланарного запуска), а вектор N°1 – путем увеличения времени запуска соответственно на ?TL—?Ts. Величина ?Tsизменяется до тех пор, пока веса в конце участков выведения для первой и второй возможностей запуска не станут равными. Для получения компромиссного времени запуска текущая величияа ?Ts вычитается затем из времени соответствующего второй возможности компланарного запуска.
Ошибка при определении компромиссного времени запуска описанным выше способом может достигать ~20 сек. Однако это время отвечает требованиям проведения итерационных расчетов, связанных с изменением плоскости движения при первой и второй возможностях запуска. После проведения этих расчетов полученные векторы цели, которые принадлежат гиперповерхности, соответствующей изменению плоскости движения, используются для расчета второго приближения компромиссного времени запуска. Нормальные к плоскости промежуточной орбиты векторы снова варьируются, чтобы уравнять веса на траектории полета к Луне. Использование скорректированного компромиссного времени запуска в программе моделирования активного участка показало достаточную точность процедуры уравнивания весов. Это приводило к незначительному расходу топлива на коррекцию среднего участка траектории, связанную с использованием времени запуска, отличающегося от запланированного.
Полет с изменяющимся временем (класс 2).
Как следует из рис. 31.3, время запуска для задачи, относящейся к классу 2, определяется существенно проще. Времена запуска для первой и второй возможностей в случае в (рис. 31.3) не являются одинаковыми из-за прецессии орбиты к моменту наступления второй возможности старта. Однако это влияние незначительно и не затрагивает логики, которая используется при выборе траекторий класса 2. Анализ параметров прицеливания показывает, какой класс траекторий (1 или 2) должен использоваться. Когда установлено, что имеет место случай в, то участки вычислительной программы для случаев а и б обходятся. Вектор цели для второй возможности запуска и соответствующие параметры (гиперповерхность) вычисляются на основе времени старта при компланарном перелете. Время запуска для второй возможности используется при определении параметров прицеливания для первой возможности. Как указывалось выше, это время запуска не будет являться оптимальным для первой возможности, однако оно отличается от оптимального всего на несколько секунд.
Исследование параметров траектории перелета
Как отмечалось выше, лунными параметрами прицеливания (т. е. зависимыми переменными в схеме вычислений) являются радиус максимального сближения Rm и широта ?* в селеноцентрической системе координат. Однако эти переменные являются нелинейными по отношению к изменению независимых переменных. Определение широты ?* представляет собой особую проблему, потому что в селеноцентрической системе координат эта задача двузначна (одной и той же широты можно достигнуть при сближении по направлению движения Луны и против направления движения). Для получения эффективной вычислительной схемы используются метод параметров попадания и метод перемещающейся конечной точки. Система координат для параметров попадания при встрече с Луной строится, как показано на рис. 31.6; ось Т0m находится в плоскости лунного экватора,
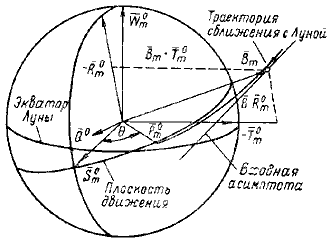 Рис. 31.6. Параметры попадания при встрече с Луной.
Рис. 31.6. Параметры попадания при встрече с Луной.
ось S0m параллельна входной асимптоте и расположена в плоскости движения, а ось R0m дополняет систему до правой. Параметры попадания В.Т0 и B.R 0 для заданных значений Rm и наклонения Ist
 где Т 0, R0 – единичные векторы; звездочка означает требуемые конечные условия; а – большая полуось гиперболы. Как видно из рис. 31.7, траектория первого приближения достаточно точно определяет величину а. Даже когда траектория первого приближения не будет удовлетворять заданным конечным условиям, например, не достигается величина Rm*, тем не менее входная асимптота и большая полуось окажутся близкими к заданным конечным величинам. Это медленное изменение асимптоты можно классифицировать как квазипостоянство входной асимптоты гиперболической траектории. Однако параметры прицеливания содержат широту ?* вместо наклонения Ist*. Основываясь на принципе квазипостоянства входной асимптоты гиперболической траектории,
где Т 0, R0 – единичные векторы; звездочка означает требуемые конечные условия; а – большая полуось гиперболы. Как видно из рис. 31.7, траектория первого приближения достаточно точно определяет величину а. Даже когда траектория первого приближения не будет удовлетворять заданным конечным условиям, например, не достигается величина Rm*, тем не менее входная асимптота и большая полуось окажутся близкими к заданным конечным величинам. Это медленное изменение асимптоты можно классифицировать как квазипостоянство входной асимптоты гиперболической траектории. Однако параметры прицеливания содержат широту ?* вместо наклонения Ist*. Основываясь на принципе квазипостоянства входной асимптоты гиперболической траектории,
ось S0m параллельна входной асимптоте и расположена в плоскости движения, а ось R0m дополняет систему до правой. Параметры попадания В.Т0 и B.R 0 для заданных значений Rm и наклонения Ist