Страница:
Пять ЖРД J-2 ступени S-II запускаются одновременно, и через 23 сек сбрасывается нижний переходник ступени S-II.
Далее экипаж вручную подает команду на зажигание РДТТ, сбрасывающего систему аварийного спасения (эта система связана только с кораблем и не управляется от ракеты-носителя).
Управляет полетом S-II бортовая ЭЦВМ приборного отсека, вырабатывающая сигналы сервоприводам карданов периферийных ЖРД.
Для управления тангажом ЖРД отклоняются на ±7° и для управления рысканием на ±10°; комбинированное отклонение позволяет произвести коррекцию ошибки по крену с угловой скоростью 8 град/сек.
Через 40 сек после запуска ЖРД J-2 бортовая ЭЦВМ переходит на режим итерационного управления. С этого момента управление полетом осуществляется по методу настраивающейся траектории.
Сигнал на выключение ЖРД J-2 подается в блок электрического управления двигателем, выключается соленоидный клапан управления подачей гелия, закрываются главные клапаны горючего и окислителя и клапан газогенератора, открывается перепускной кислородный клапан, и газогенератор и головка камеры сгорания продуваются кислородом.
Через 700 мсек после выключения ЖРД J-2 ступени S-II по сигналу селектора последовательности операций запускаются 2 РДТТ Thiokol TX-280, каждый развивает в течение 4 сек тягу 1540 кг (они установлены на нижнем переходнике ступени S-IVB и производят осадку топлива в баках). Через 0,1 сек после запуска РДТТ на S-IVB пиротехническими зарядами срезаются планки, соединяющие S-II и S-IVB, запускаются 4 тормозных РДТТ, установленных на верхнем переходнике ступени S-II (каждый с тягой 16 т, продолжительностью работы 1,5 сек, весом 175 кг}.
Отделение ступени S-II происходит на высоте H=186 км при скорости V=7 км/сек на дальности 1650 км; продолжая полет по баллистической траектории, ступень S-II через 11 мин после отделения падает в Атлантический океан на расстоянии 4250 км от места старта.
Последовательность операций при запуске ЖРД J-2 ступени S-IVB такая же, как при запуске J-2 ступени S-II, но продолжительность холодной проливки вместо 1 сек увеличивается до 3 сек. Для обеспечения повторного запуска ЖРД J-2 в начальной фазе работы двигателя пусковой бак вновь заполняется газообразным водородом, забираемым из трубопровода, подводящего горючее в камеру ЖРД. Через 8 сек после выхода на режим ЖРД J-2 по команде регулятора последовательности операций сбрасываются два отработанных блока РДТТ вместе с обтекателями и креплением.
Управление полетом ступени S-IVB осуществляется отклонением вектора тяги ЖРД J-2 по командам бортовой ЭЦВМ приборного отсека. Электронасос гадросистемы, управляющей отклонением ЖРД на кардане, начинает работать до старта ракеты и держит систему под давлением, в результате чего ось ЖРД удерживается ориентированной через центр масс аппарата. На активном участке траектории гидросистема управления вектором тяги отклоняет ЖРД на 7° в двух перпендикулярных направлениях.
Выключение ЖРД J-2 ступени S-IVB происходит по команде датчика скорости полета. Процесс выключения идентичен выключению J-2 ступени S-II.
Через 300 мсек после выключения ЖРД J-2 запускаются 2 ЖРД осадки топлива, развивающие тягу по 32 кг и работающие около 86 сек до начала вентиляции бака жидкого водорода. Вентиляционная магистраль начинается у редукционного клапана бака и заканчивается двумя соплами малой тяги, расположенными под 180° на обшивке приборного отсека и дающими тягу, регулируемую пневматическим блоком, от 20 до 3 кг. Система обеспечивает выброс массы, при котором не создается отрицательных ускорений и возмущений, приводящих к кавитации топлива в трубопроводах перед запуском J-2.
Управление ориентацией ступени S-IVB производится двумя блоками ЖРД, содержащими по 3 двигателя с тягами по 68 кг каждый, работающих в импульсном режиме с минимальным импульсом 70 мсек.
В каждом блоке установлены отдельные баки для горючего и окислителя и бак с газообразным гелием под высоким давлением для поддува топливных баков. Горючее CH3N2H3 стабильно при очень низких температурах и нечувствительно к ударам, окислитель N2O4.
Перед повторным выпуском ЖРД J-2 для вывода корабля Apollo на траекторию полета к Луне вся система подачи жидкого водорода, ТНА и двигатель должны быть охлаждены. Охлаждение осуществляется циркуляционной системой. По команде, поступающей из приборного отсека, открывается клапан системы охлаждения, и насос, установленный в баке жидкого водорода, создающий давление 0,5 кг/см? обеспечивает циркуляцию жидкого водорода с прокачкой 500 л/мин. Сразу после начала процесса охлаждения, включаются ЖРД осадки топлива. Охлаждение длится 320 сек, заканчивается за 9 сек до запуска ЖРД. Повторный запуск J-2 начинается после получения сигнала «двигатель готов».
Двигатель выключается по сигналу бортовой ЭЦВМ, когда вектор начальной скорости полета на Луну достигнет требуемой величины.
Через 80 мин после выключения J-2 корабль Apollo отделяется от ступени S-IV В.
1.3. Оптимизация характеристик ракеты-носителя Saturn V
Уменьшение неиспользуемых остатков топлива
Заправка излишка горючего с целью максимизации полезной нагрузки
Система опорожнения баков
Уменьшение потерь скорости
Вычисление потерь
Программное изменение соотношения компонентов топлива
Полет с постоянным углом наклона траектории
Связи между приращениями скорости и полезной нагрузки
Полет с переменным углом наклона траектории
Уменьшение потерь во время полета первой ступени
Уточнение статистических оценок характеристик ракеты
1.4. Космический корабль Apollo
Командный и служебный отсеки
Система жизнеобеспечения экипажа корабля Apollo
Далее экипаж вручную подает команду на зажигание РДТТ, сбрасывающего систему аварийного спасения (эта система связана только с кораблем и не управляется от ракеты-носителя).
Управляет полетом S-II бортовая ЭЦВМ приборного отсека, вырабатывающая сигналы сервоприводам карданов периферийных ЖРД.
Для управления тангажом ЖРД отклоняются на ±7° и для управления рысканием на ±10°; комбинированное отклонение позволяет произвести коррекцию ошибки по крену с угловой скоростью 8 град/сек.
Через 40 сек после запуска ЖРД J-2 бортовая ЭЦВМ переходит на режим итерационного управления. С этого момента управление полетом осуществляется по методу настраивающейся траектории.
Сигнал на выключение ЖРД J-2 подается в блок электрического управления двигателем, выключается соленоидный клапан управления подачей гелия, закрываются главные клапаны горючего и окислителя и клапан газогенератора, открывается перепускной кислородный клапан, и газогенератор и головка камеры сгорания продуваются кислородом.
Через 700 мсек после выключения ЖРД J-2 ступени S-II по сигналу селектора последовательности операций запускаются 2 РДТТ Thiokol TX-280, каждый развивает в течение 4 сек тягу 1540 кг (они установлены на нижнем переходнике ступени S-IVB и производят осадку топлива в баках). Через 0,1 сек после запуска РДТТ на S-IVB пиротехническими зарядами срезаются планки, соединяющие S-II и S-IVB, запускаются 4 тормозных РДТТ, установленных на верхнем переходнике ступени S-II (каждый с тягой 16 т, продолжительностью работы 1,5 сек, весом 175 кг}.
Отделение ступени S-II происходит на высоте H=186 км при скорости V=7 км/сек на дальности 1650 км; продолжая полет по баллистической траектории, ступень S-II через 11 мин после отделения падает в Атлантический океан на расстоянии 4250 км от места старта.
Последовательность операций при запуске ЖРД J-2 ступени S-IVB такая же, как при запуске J-2 ступени S-II, но продолжительность холодной проливки вместо 1 сек увеличивается до 3 сек. Для обеспечения повторного запуска ЖРД J-2 в начальной фазе работы двигателя пусковой бак вновь заполняется газообразным водородом, забираемым из трубопровода, подводящего горючее в камеру ЖРД. Через 8 сек после выхода на режим ЖРД J-2 по команде регулятора последовательности операций сбрасываются два отработанных блока РДТТ вместе с обтекателями и креплением.
Управление полетом ступени S-IVB осуществляется отклонением вектора тяги ЖРД J-2 по командам бортовой ЭЦВМ приборного отсека. Электронасос гадросистемы, управляющей отклонением ЖРД на кардане, начинает работать до старта ракеты и держит систему под давлением, в результате чего ось ЖРД удерживается ориентированной через центр масс аппарата. На активном участке траектории гидросистема управления вектором тяги отклоняет ЖРД на 7° в двух перпендикулярных направлениях.
Выключение ЖРД J-2 ступени S-IVB происходит по команде датчика скорости полета. Процесс выключения идентичен выключению J-2 ступени S-II.
Через 300 мсек после выключения ЖРД J-2 запускаются 2 ЖРД осадки топлива, развивающие тягу по 32 кг и работающие около 86 сек до начала вентиляции бака жидкого водорода. Вентиляционная магистраль начинается у редукционного клапана бака и заканчивается двумя соплами малой тяги, расположенными под 180° на обшивке приборного отсека и дающими тягу, регулируемую пневматическим блоком, от 20 до 3 кг. Система обеспечивает выброс массы, при котором не создается отрицательных ускорений и возмущений, приводящих к кавитации топлива в трубопроводах перед запуском J-2.
Управление ориентацией ступени S-IVB производится двумя блоками ЖРД, содержащими по 3 двигателя с тягами по 68 кг каждый, работающих в импульсном режиме с минимальным импульсом 70 мсек.
В каждом блоке установлены отдельные баки для горючего и окислителя и бак с газообразным гелием под высоким давлением для поддува топливных баков. Горючее CH3N2H3 стабильно при очень низких температурах и нечувствительно к ударам, окислитель N2O4.
Перед повторным выпуском ЖРД J-2 для вывода корабля Apollo на траекторию полета к Луне вся система подачи жидкого водорода, ТНА и двигатель должны быть охлаждены. Охлаждение осуществляется циркуляционной системой. По команде, поступающей из приборного отсека, открывается клапан системы охлаждения, и насос, установленный в баке жидкого водорода, создающий давление 0,5 кг/см? обеспечивает циркуляцию жидкого водорода с прокачкой 500 л/мин. Сразу после начала процесса охлаждения, включаются ЖРД осадки топлива. Охлаждение длится 320 сек, заканчивается за 9 сек до запуска ЖРД. Повторный запуск J-2 начинается после получения сигнала «двигатель готов».
Двигатель выключается по сигналу бортовой ЭЦВМ, когда вектор начальной скорости полета на Луну достигнет требуемой величины.
Через 80 мин после выключения J-2 корабль Apollo отделяется от ступени S-IV В.
1.3. Оптимизация характеристик ракеты-носителя Saturn V
Детальное исследование динамики полета ракеты-носителя Saturn V, применение системы одновременного опорожнения баков, заправка излишка горючего, выбор формы траектории и программного соотношения изменения компонентов топлива в полете позволяют уменьшить потери, связанные с неполным использованием заправленного топлива, преодолением сил аэродинамического сопротивления и земного тяготения. Оптимизация характеристик ракеты-носителя Saturn V позволила увеличить ее полезную нагрузку на ~2000 кг.
Уменьшение неиспользуемых остатков топлива
В связи со статистической неопределенностью характеристик заправки топлива и летных характеристик ракеты прм выключении двигательной установки в баках остается часть горючего и окислителя. Неиспользуемые остатки топлива увеличивают инертный вес и снижают эффективность ракеты-носителя.
Применение системы одновременного опорожнения баков позволяет повысить эффективность ракеты на жидком топливе, так как такая система, регулируя соотношение компонентов топлива, обеспечивает одновременный расход всего горючего и всего окислителя. Другой метод состоит в заправке определенного излишка горючего и обеспечивает улучшение характеристик двигательных установок без применения сложных систем измерения и регулирования. Заправляемый в баки ступени излишек горючего определяется исходя из условия равенства предельно допустимых остатков окислителя и горючего при одинаковых вероятностях их появления. Заправка некоторого излишка горючего позволяет уменьшить средний вес неиспользуемых остатков топлива.
Применение системы одновременного опорожнения баков позволяет повысить эффективность ракеты на жидком топливе, так как такая система, регулируя соотношение компонентов топлива, обеспечивает одновременный расход всего горючего и всего окислителя. Другой метод состоит в заправке определенного излишка горючего и обеспечивает улучшение характеристик двигательных установок без применения сложных систем измерения и регулирования. Заправляемый в баки ступени излишек горючего определяется исходя из условия равенства предельно допустимых остатков окислителя и горючего при одинаковых вероятностях их появления. Заправка некоторого излишка горючего позволяет уменьшить средний вес неиспользуемых остатков топлива.
Заправка излишка горючего с целью максимизации полезной нагрузки
Заправка излишка горючего с целью минимизации неиспользуемых остатков топлива, очевидно, позволяет увеличить полезную нагрузку ракеты-носителя, однако она не обеспечивает получения максимально возможной полезной нагрузки. В некотором диапазоне уменьшение излишка заправленного горючего приводит к увеличению веса. Определение излишка заправляемого горючего представляет собой нелинейную вероятностную задачу.
Система опорожнения баков
Заправка излишка горючего дает значительный эффект, однако неиспользуемые остатки топлива могут быть дополнительно уменьшены с помощью системы одновременного опорожнения баков. Эта система измеряет уровень горючего и окислителя в полете и регулирует расходы так, чтобы оба компонента топлива были израсходованы одновременно. Система состоит из датчиков для измерения текущих уровней топлива в каждом баке, счетно-решающего устройства для определения условий одновременного опорожнения баков и дросселя, установленного на расходной магистрали и регулирующего соотношение компонентов.
Сравнение сигналов датчиков от двух баков в счетно-решающем устройстве позволяет автоматически управлять дросселем. Регулирование осуществляется путем перепуска части расхода окислителя из запорной магистрали на вход в насос. Такое регулирование в замкнутом контуре обеспечивает близкое к одновременному израсходование компонентов топлива и позволяет увеличить полезную нагрузку, выводимую на траекторию полета к Луне по сравнению с номинальной на 200 кг.
На первый взгляд может показаться, что для ракет, оборудованных системой одновременного опорожнения баков, заправка избытка горючего для уменьшения неиспользуемых остатков топлива не нужна. Однако, в связи со случайными разбросами характеристик работы системы опорожнения, остаются небольшие неиспользуемые остатки и необходимость заправки избытка горючего сохраняется. Но заправка избытка горючего в случае ступени с системой одновременного опорожнения баков приводит к дополнительным осложнениям, поскольку система будет стремиться израсходовать в первые секунды работы избыточный запас горючего, сводя к нулю эффект такой коррекции при заправке. Чтобы этого не произошло, в счетно-решающее устройство системы опорожнения баков вводится корректировка, соответствующая избытку заправленного горючего.
Сравнение сигналов датчиков от двух баков в счетно-решающем устройстве позволяет автоматически управлять дросселем. Регулирование осуществляется путем перепуска части расхода окислителя из запорной магистрали на вход в насос. Такое регулирование в замкнутом контуре обеспечивает близкое к одновременному израсходование компонентов топлива и позволяет увеличить полезную нагрузку, выводимую на траекторию полета к Луне по сравнению с номинальной на 200 кг.
На первый взгляд может показаться, что для ракет, оборудованных системой одновременного опорожнения баков, заправка избытка горючего для уменьшения неиспользуемых остатков топлива не нужна. Однако, в связи со случайными разбросами характеристик работы системы опорожнения, остаются небольшие неиспользуемые остатки и необходимость заправки избытка горючего сохраняется. Но заправка избытка горючего в случае ступени с системой одновременного опорожнения баков приводит к дополнительным осложнениям, поскольку система будет стремиться израсходовать в первые секунды работы избыточный запас горючего, сводя к нулю эффект такой коррекции при заправке. Чтобы этого не произошло, в счетно-решающее устройство системы опорожнения баков вводится корректировка, соответствующая избытку заправленного горючего.
Уменьшение потерь скорости
При движении ракеты вдоль активного участка траектории полета часть энергии топлива расходуется на бесполезную работу по преодолению силы тяжести и силы аэродинамического сопротивления. Эти потери могут быть уменьшены путем сокращения продолжительности активного участка или путем тщательного выбора траектории полета, однако часть этих потерь является неизбежной.
Полное исключение гравитационных потерь позволило бы увеличить выводимую к Луне полезную нагрузку ракеты-носителя Saturn V на 22 700 кг. Полное устранение потерь на управление и преодоление силы аэродинамического сопротивления дало бы дополнительный выигрыш в 4540 кг.
С целью уменьшения потерь скорости можно применить регулирование в полете соотношения компонентов топлива, которое приводит к значительному выигрышу в весе полезной нагрузки.
Полное исключение гравитационных потерь позволило бы увеличить выводимую к Луне полезную нагрузку ракеты-носителя Saturn V на 22 700 кг. Полное устранение потерь на управление и преодоление силы аэродинамического сопротивления дало бы дополнительный выигрыш в 4540 кг.
С целью уменьшения потерь скорости можно применить регулирование в полете соотношения компонентов топлива, которое приводит к значительному выигрышу в весе полезной нагрузки.
Вычисление потерь
Приращение скорости, обеспечиваемое ракетной ступенью, может быть определено путем вычитания из характеристической скорости гравитационных, аэродинамических потерь и потерь на управление[3]
 В табл. 1 представлены типичные значения потерь для ракеты-носителя Saturn V применительно к траектории полета на Луну.
В табл. 1 представлены типичные значения потерь для ракеты-носителя Saturn V применительно к траектории полета на Луну.
Таблица 1
 Несовпадение вектора тяга двигательной установки с вектором скорости полета ракеты приводит к потерям на управление. Эти потери уменьшают скорость полета ракеты-носителя Saturn V на 187,5 м/сек. Однако, если бы траектория была направлена против вектора гравитации, гравитационные потери были бы значительно больше 187,5 м/сек.
Несовпадение вектора тяга двигательной установки с вектором скорости полета ракеты приводит к потерям на управление. Эти потери уменьшают скорость полета ракеты-носителя Saturn V на 187,5 м/сек. Однако, если бы траектория была направлена против вектора гравитации, гравитационные потери были бы значительно больше 187,5 м/сек.
Таблица 1
Программное изменение соотношения компонентов топлива
Во время активного участка полета второй ступени ракеты-носителя Saturn V производится 20%-ное ступенчатое изменение соотношения компонентов топлива, вызывающее соответственно уменьшение тяги и увеличение удельного импульса.
При одинаковых заправках топлива характеристическая скорость ступени одинакова для полетов с постоянным соотношением компонентов топлива и программным изменением этого соотношения. Таким образом, улучшение характеристик при программном изменении соотношения компонентов достигается путем уменьшения потерь скорости, а не вследствие увеличения характеристической скорости. В основном, программное изменение соотношения компонентов уменьшает потери благодаря тому, что при этом топливо более быстро расходуется на начальном участке траектории и затраты энергии на подъем топлива в поле тяготения уменьшаются.
Угол наклона траектории полета ракеты-носителя Saturn V на активном участке имеет вид экспоненциальной кривой (рис. 13.1).
Эффект ступенчатого изменения соотношения компонентов топлива при полете по такой траектории не поддается простому наглядному объяснению, однако можно сказать, что большая тяга желательна, когда движение ракеты близко к вертикальному, а большой удельный импульс желателен при движении ракеты, близком к горизонтальному. Рассмотрим пример, позволяющий показать, почему оптимальное значение удельного импульса сильно зависит от угла наклона траектории полета.
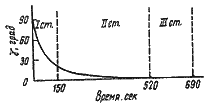 Рис. 13.1. Программа изменения угла наклона траектории полета ракеты-носителя Saturn V
Рис. 13.1. Программа изменения угла наклона траектории полета ракеты-носителя Saturn V
При одинаковых заправках топлива характеристическая скорость ступени одинакова для полетов с постоянным соотношением компонентов топлива и программным изменением этого соотношения. Таким образом, улучшение характеристик при программном изменении соотношения компонентов достигается путем уменьшения потерь скорости, а не вследствие увеличения характеристической скорости. В основном, программное изменение соотношения компонентов уменьшает потери благодаря тому, что при этом топливо более быстро расходуется на начальном участке траектории и затраты энергии на подъем топлива в поле тяготения уменьшаются.
Угол наклона траектории полета ракеты-носителя Saturn V на активном участке имеет вид экспоненциальной кривой (рис. 13.1).
Эффект ступенчатого изменения соотношения компонентов топлива при полете по такой траектории не поддается простому наглядному объяснению, однако можно сказать, что большая тяга желательна, когда движение ракеты близко к вертикальному, а большой удельный импульс желателен при движении ракеты, близком к горизонтальному. Рассмотрим пример, позволяющий показать, почему оптимальное значение удельного импульса сильно зависит от угла наклона траектории полета.
Полет с постоянным углом наклона траектории
Рассматривая движение ракеты по траектории с постоянным углом наклона в постоянном гравитационном поле, предположим, что тяга, расход топлива и удельный импульс являются линейными ограниченными функциями соотношения компонентов топлива, причем тяга и расход топлива – возрастающие функции, а удельный импульс – убывающая функция.
Задача сводится к выбору такого соотношения компонентов топлива, при котором ракета в конце активного участка будет иметь максимальную скорость.
Если предположить, что потери на управление и преодоление силы аэродинамического сопротивления пренебрежимо малы, а удельный импульс постоянен, то скорость в конце активного участка полета ракеты может быть определена по формуле
 Поскольку g0 и ? постоянные величины, уравнение можно проинтегрировать
Поскольку g0 и ? постоянные величины, уравнение можно проинтегрировать
 Для второй ступени ракеты-носителя Saturn V можно установить, что меньший удельный импульс обеспечивает максимум конечной скорости в случае вертикального полета, так как большая тяга и меньшая продолжительность активного участка позволяют уменьшить гравитационные потери, но при горизонтальном полете член, характеризующий гравитационные потери, равен нулю, независимо от времени работы двигателей, и в этом случае желателен более высокий удельный импульс. Таким образом для какого-то промежуточного значения угла ? между 0 и 90° скорость в конце активного участка не зависит от величины удельного имлульса. Это значение можно определить по формуле граничные значения линейных функций удельного импульса и секундного расхода.
Для второй ступени ракеты-носителя Saturn V можно установить, что меньший удельный импульс обеспечивает максимум конечной скорости в случае вертикального полета, так как большая тяга и меньшая продолжительность активного участка позволяют уменьшить гравитационные потери, но при горизонтальном полете член, характеризующий гравитационные потери, равен нулю, независимо от времени работы двигателей, и в этом случае желателен более высокий удельный импульс. Таким образом для какого-то промежуточного значения угла ? между 0 и 90° скорость в конце активного участка не зависит от величины удельного имлульса. Это значение можно определить по формуле граничные значения линейных функций удельного импульса и секундного расхода.
 Для второй ступени ракеты-носителя Saturn V по уравнению (13;5) получим ?=3; таким образом, если угол наклона траектории меньше 3°, то желательно иметь большой удельный импульс при меньшей тяге, а если ?>3° снижение удельного импульса при увеличении тяги позволяет увеличить полезную нагрузку.
Для второй ступени ракеты-носителя Saturn V по уравнению (13;5) получим ?=3; таким образом, если угол наклона траектории меньше 3°, то желательно иметь большой удельный импульс при меньшей тяге, а если ?>3° снижение удельного импульса при увеличении тяги позволяет увеличить полезную нагрузку.
Задача сводится к выбору такого соотношения компонентов топлива, при котором ракета в конце активного участка будет иметь максимальную скорость.
Если предположить, что потери на управление и преодоление силы аэродинамического сопротивления пренебрежимо малы, а удельный импульс постоянен, то скорость в конце активного участка полета ракеты может быть определена по формуле
Связи между приращениями скорости и полезной нагрузки
В конечном итоге необходимо обеспечить максимум веса полезной нагрузки, а не скорости в конце активного участка траектории полета.
Для последней ступени ракеты в момент выключения двигательной установки имеем
 Подставляя m1= m2+?m1, разлагая полученное выражение в ряд Тейлора и решая относительно ?m1 получим
Подставляя m1= m2+?m1, разлагая полученное выражение в ряд Тейлора и решая относительно ?m1 получим
 Для ракеты-носителя Saturn V приращение характеристической скорости на 1 м/сек экивалентно увеличению веса полезной нагрузки, выводимой на траекторию полета к Луне, на 15 кг.
Для ракеты-носителя Saturn V приращение характеристической скорости на 1 м/сек экивалентно увеличению веса полезной нагрузки, выводимой на траекторию полета к Луне, на 15 кг.
Для последней ступени ракеты в момент выключения двигательной установки имеем
Полет с переменным углом наклона траектории
В практических случаях угол наклона траектории полета ракеты меняется со временем, и оптимальная величина удельного импульса не является постоянной для всего полета. Меньший удельный импульс при большей тяге выгоден на участке траектории, близком к вертикальному, затем при переходе к более пологому участку траектории целесообразно изменить соотношение компонентов топлива таким образом, чтобы обеспечить высокий удельный импульс. Однако требование достижения определенной высоты в конце активного участка усложняет анализ реального полета.
В реальном полете управление ракетой, близкое к оптимальному, обеспечивает достижение заданной высоты в конце активного участка.
Изменение расхода топлива в процессе полета в предположении постоянства удельного импульса и фиксированного времени работы двигательной установки не приводит к изменению характеристической скорости. Однако, если энерговооруженность выше и расход топлива больше на начальном этапе полета, то ракета будет двигаться с большим ускорением и, следовательно, высота полета в конце активного участка будет больше.
Таким образом, если топливо выгорает быстрее при большей тяге на начальном этапе полета, то это приводит к увеличению высоты в конце активного участка. Но высота, большая по сравнению с расчетной, нежелательна, поэтому вектор скорости будет раньше приведен в горизонтальное положение. В результате соответственно снижаются потери на преодоление гравитационных сил и на управление.
В реальном полете управление ракетой, близкое к оптимальному, обеспечивает достижение заданной высоты в конце активного участка.
Изменение расхода топлива в процессе полета в предположении постоянства удельного импульса и фиксированного времени работы двигательной установки не приводит к изменению характеристической скорости. Однако, если энерговооруженность выше и расход топлива больше на начальном этапе полета, то ракета будет двигаться с большим ускорением и, следовательно, высота полета в конце активного участка будет больше.
Таким образом, если топливо выгорает быстрее при большей тяге на начальном этапе полета, то это приводит к увеличению высоты в конце активного участка. Но высота, большая по сравнению с расчетной, нежелательна, поэтому вектор скорости будет раньше приведен в горизонтальное положение. В результате соответственно снижаются потери на преодоление гравитационных сил и на управление.
Уменьшение потерь во время полета первой ступени
Расчет на вычислительной машине показывает, что применение программного изменения соотношения компонентов топлива на активном участке полета второй ступени приводит к значительному уменьшению гравитационных потерь на активном участке полета первой ступени. На первый взгляд это кажется парадоксальным. Но этот эффект объясняется особенностями применяемой на ракете-носителе Saturn V системы управления траекторией полета.
Принцип итерационного управления реализован лишь на верхних ступенях ракеты. На активном участке первой ступени ракета-носитель Saturn V летит по жестко заданной траектории, обеспечивающей минимальные аэродинамические нагрузки. Однако, оптимальность параметров жестко заданной траектории активного участка первой ступени связана с программой работы двигательной установки второй ступени. Высокая тяга на начальном этапе работы второй ступени позволяет выбрать более пологую траекторию на активном участке первой ступени, что приводит к значительному уменьшению гравитационных потерь во время полета ракеты с работающей первой ступенью.
Принцип итерационного управления реализован лишь на верхних ступенях ракеты. На активном участке первой ступени ракета-носитель Saturn V летит по жестко заданной траектории, обеспечивающей минимальные аэродинамические нагрузки. Однако, оптимальность параметров жестко заданной траектории активного участка первой ступени связана с программой работы двигательной установки второй ступени. Высокая тяга на начальном этапе работы второй ступени позволяет выбрать более пологую траекторию на активном участке первой ступени, что приводит к значительному уменьшению гравитационных потерь во время полета ракеты с работающей первой ступенью.
Уточнение статистических оценок характеристик ракеты
Статистическая неопределенность характеристик ракеты-носителя приводит к уменьшению ее полезной нагрузки. Это объясняется тем, что последняя ступень ракеты-носителя должна иметь гарантированный запас топлива, достаточный для компенсации разброса характеристик всех ступеней ракеты-носителя. Гарантийный запас топлива на третьей ступени ракеты-носителя Saturn V в 1969 г. был принят равным 1 т. Наиболее значительные потери связаны с неопределенностью тяги и удельного импульса. В табл. 2 приводятся значения частных производных веса полезной нагрузки по тяге и удельному импульсу для всех трех ступеней ракеты-носителя Saturn V. Анализ летных испытаний позволил улучшить статистические оценки характеристик двигательных установок и уменьшить гарантийный запас. Уменьшение гарантийного запаса топлива на последней ступени на 1 кг примерно равноценно соответствующему увеличению веса полезной нагрузки. [17]
Таблица 2
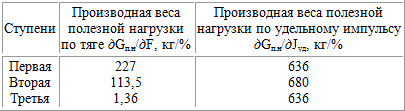 Таблица 3
Таблица 3
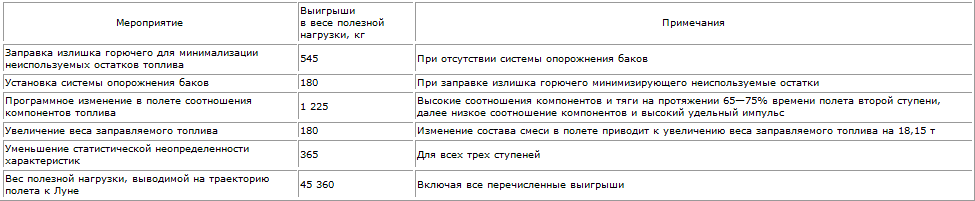
Таблица 2
1.4. Космический корабль Apollo
Космический корабль Apollo состоит из командного и служебного отсеков, лунного корабля и системы аварийного спасения (рис. 14.1).
В табл. 4 приведены номинальный вес и размеры корабля Apollo.
Таблица 4

В табл. 4 приведены номинальный вес и размеры корабля Apollo.
Таблица 4
Командный и служебный отсеки
Командный отсек является центром управления полетом. Все члены экипажа в течение полета находятся в командном отсеке, за исключением этапа высадки на Луну. Командный отсек – единственная часть системы Saturn-Apollo, в которой экипаж возвращается на Землю после полета на Луну. Служебный отсек несет основную двигательную установку и системы обеспечения корабля Apollo.
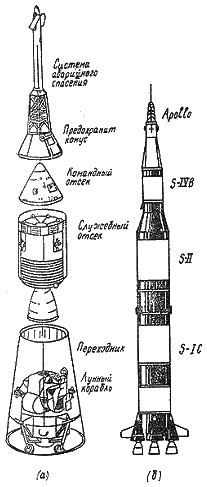 Рис. 14.1. Космический корабль Apollo (а), компановка корабля Apollo на ракете-носителе Saturn V (б).
Рис. 14.1. Космический корабль Apollo (а), компановка корабля Apollo на ракете-носителе Saturn V (б).
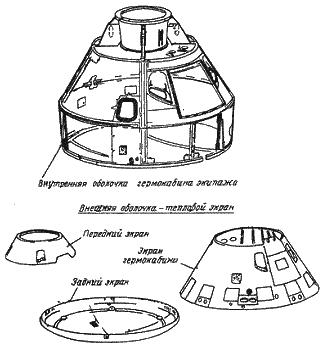 Рис. 14.2. Командный отсек корабля Apollo. Внутренняя оболочка гермокабины экипажа и тепловой экран.
Рис. 14.2. Командный отсек корабля Apollo. Внутренняя оболочка гермокабины экипажа и тепловой экран.
Командный отсек корабля Apollo фирмы North American Rockwell (США) имеет форму конуса со сферическим основанием, диаметр основания 3920 мм, высота конуса 3430 мм, угол при вершине 60°, номинальный вес 5500 кг (рис. 14.2 и 14.3).
Командный отсек имеет герметическую кабину с системой жизнеобеспечения экипажа, систему управления и навигации, систему радиосвязи, систему аварийного спасения и теплозащитный экран.
Конструктивно командный отсек выполнен в виде двух оболочек. Внутренняя оболочка из алюминиевых сотовых профилированных панелей толщиной 20…38 мм, сварной конструкции – герметическая кабина экипажа со свободным объемом 6,1 м?; внешняя оболочка из профилированных сотовых панелей толщиной 15…63 мм, сваренных из листовой нержавеющей стали толщиной 0,2…1 мм. Внешняя оболочка, образующая тепловой барьер, защищающий гермокабину экипажа, состоит из трех частей: переднего экрана, экрана гермокабины и заднего экрана, крепящихся к гермокабине двутавровыми силовыми элементами из стекловолокна, изолирующими гермокабину от теплопроводности и температурных напряжений. Дополнительная теплоизоляция обеспечивается слоем стекловолокна между оболочками.
Абляционное теплозащитное покрытие внешней оболочки командного отсека сотовой конструкции из фенольного найлона с заполнителем из эпоксидной смолы с кварцевыми волокнами и микропузырьками. Абляционное покрытие переменной толщины от 8 до 44 мм приклепывается к внешней оболочке фенольным клеем (рис. 14.2).
Оборудование командного отсека. В передней негерметизируемой части командного отсека размещены стыковочный механизм и парашютная система посадки, в средней части 3 кресла астронавтов, пульт управления полетом и системой жизнеобеспечения и радиооборудование; в пространстве между задним экраном и гермокабиной размещено оборудование реактивной системы управления (РСУ).
На рис. 14.3 (см. вкладку в конце книги) показаны узлы и детали оборудования командного отсека.
Стыковочный механизм и деталь лунного корабля с внутренней нарезкой совместно обеспечивают жесткую стыковку командного отсека с лунным кораблем и образуют туннель для перехода экипажа из командного отсека в лунный корабль и обратно.
Стыковочный механизм состоит из стыковочного кольца с герметизирующим уплотнением и 12 автоматическими замками, узла штыря на командном отсеке и стыковочного приемного конуса на лунном корабле (рис. 14.4).
Жесткое соединение после стыковки обеспечивается, когда штырь войдет в приемный конус, и кольцо туннеля лунного корабля встанет на автоматические замки. Закрытие замков обеспечивает герметичность соединения. Если один из замков не закрылся автоматически, экипаж закрывает его вручную. Давление по обе стороны приемного конуса выравнивается через клапан, снимается штырь и приемный конус, открывается люк лунного корабля и образуется туннель между командным отсеком и лунным кораблем.
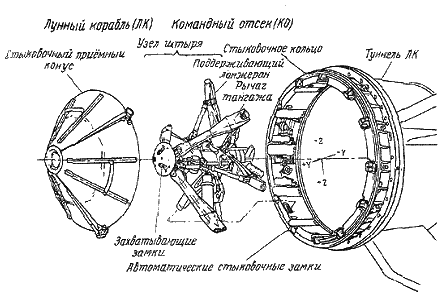 Рис. 14.4. Узел стыковки командного отсека с лунным кораблем
Рис. 14.4. Узел стыковки командного отсека с лунным кораблем
Командный отсек корабля Apollo фирмы North American Rockwell (США) имеет форму конуса со сферическим основанием, диаметр основания 3920 мм, высота конуса 3430 мм, угол при вершине 60°, номинальный вес 5500 кг (рис. 14.2 и 14.3).
Командный отсек имеет герметическую кабину с системой жизнеобеспечения экипажа, систему управления и навигации, систему радиосвязи, систему аварийного спасения и теплозащитный экран.
Конструктивно командный отсек выполнен в виде двух оболочек. Внутренняя оболочка из алюминиевых сотовых профилированных панелей толщиной 20…38 мм, сварной конструкции – герметическая кабина экипажа со свободным объемом 6,1 м?; внешняя оболочка из профилированных сотовых панелей толщиной 15…63 мм, сваренных из листовой нержавеющей стали толщиной 0,2…1 мм. Внешняя оболочка, образующая тепловой барьер, защищающий гермокабину экипажа, состоит из трех частей: переднего экрана, экрана гермокабины и заднего экрана, крепящихся к гермокабине двутавровыми силовыми элементами из стекловолокна, изолирующими гермокабину от теплопроводности и температурных напряжений. Дополнительная теплоизоляция обеспечивается слоем стекловолокна между оболочками.
Абляционное теплозащитное покрытие внешней оболочки командного отсека сотовой конструкции из фенольного найлона с заполнителем из эпоксидной смолы с кварцевыми волокнами и микропузырьками. Абляционное покрытие переменной толщины от 8 до 44 мм приклепывается к внешней оболочке фенольным клеем (рис. 14.2).
Оборудование командного отсека. В передней негерметизируемой части командного отсека размещены стыковочный механизм и парашютная система посадки, в средней части 3 кресла астронавтов, пульт управления полетом и системой жизнеобеспечения и радиооборудование; в пространстве между задним экраном и гермокабиной размещено оборудование реактивной системы управления (РСУ).
На рис. 14.3 (см. вкладку в конце книги) показаны узлы и детали оборудования командного отсека.
Стыковочный механизм и деталь лунного корабля с внутренней нарезкой совместно обеспечивают жесткую стыковку командного отсека с лунным кораблем и образуют туннель для перехода экипажа из командного отсека в лунный корабль и обратно.
Стыковочный механизм состоит из стыковочного кольца с герметизирующим уплотнением и 12 автоматическими замками, узла штыря на командном отсеке и стыковочного приемного конуса на лунном корабле (рис. 14.4).
Жесткое соединение после стыковки обеспечивается, когда штырь войдет в приемный конус, и кольцо туннеля лунного корабля встанет на автоматические замки. Закрытие замков обеспечивает герметичность соединения. Если один из замков не закрылся автоматически, экипаж закрывает его вручную. Давление по обе стороны приемного конуса выравнивается через клапан, снимается штырь и приемный конус, открывается люк лунного корабля и образуется туннель между командным отсеком и лунным кораблем.
Система жизнеобеспечения экипажа корабля Apollo
Система жизнеобеспечения экипажа космического корабля Apollo разработана и изготовлена фирмой Airsearch (США). Система обеспечивает поддержание в кабине корабля температуры в пределах 21…27°С, влажности от 40 до 70% и давления 0,35 кг/см?. При подготовке к старту и при старте атмосфера в кабине состоит из 60% кислорода и 40% азота, в полете эта смесь стравливается и заменяется чистым кислородом.
Система рассчитана на 4-суточное увеличение продолжительности полета сверх расчетного времени, потребного для экспедиции на Луну и поэтому предусматривается возможность регулировки и ремонта силами экипажа, одетого в скафандры.
Имеется аварийная кислородная система, которая включается автоматически и обеспечивает подачу кислорода при падении давления в кабине, например при пробое кабины метеоритом.
Криогенной установкой кислород подается в кабину через регулятор, поддерживающий давление от 0,35 до 0,38 кг/см?. Максимальная допустимая утечка кислорода из кабины 0,227 кг/ч. Система может компенсировать утечку кислорода до 0,3 кг/мин, которая возникает при пробое в стене кабины площадью 3 см?. В таком случае возросшая подача кислорода вызывает автоматическое открытие клапана подпитывающего резервуара с газообразным кислородом. При максимальной подаче в кабине в течение 5 мин будет сохраняться расчетное давление, за это время экипаж должен успеть одеть скафандры или заделать отверстие и устранить утечку кислорода из кабины.
В подпитывающем резервуаре кислород находится под давлением 70 кг/см?. Подпитывающая система на жидком кислороде не применяется, так как требуется дополнительное время для преобразования жидкого кислорода в газообразный и система становится инертной. Кислород из подпитывающей системы с давлением 1,4 кг/см? используется для вытеснительной подачи воды и гликоля из баков в агрегаты системы.
Система рассчитана на 4-суточное увеличение продолжительности полета сверх расчетного времени, потребного для экспедиции на Луну и поэтому предусматривается возможность регулировки и ремонта силами экипажа, одетого в скафандры.
Имеется аварийная кислородная система, которая включается автоматически и обеспечивает подачу кислорода при падении давления в кабине, например при пробое кабины метеоритом.
Криогенной установкой кислород подается в кабину через регулятор, поддерживающий давление от 0,35 до 0,38 кг/см?. Максимальная допустимая утечка кислорода из кабины 0,227 кг/ч. Система может компенсировать утечку кислорода до 0,3 кг/мин, которая возникает при пробое в стене кабины площадью 3 см?. В таком случае возросшая подача кислорода вызывает автоматическое открытие клапана подпитывающего резервуара с газообразным кислородом. При максимальной подаче в кабине в течение 5 мин будет сохраняться расчетное давление, за это время экипаж должен успеть одеть скафандры или заделать отверстие и устранить утечку кислорода из кабины.
В подпитывающем резервуаре кислород находится под давлением 70 кг/см?. Подпитывающая система на жидком кислороде не применяется, так как требуется дополнительное время для преобразования жидкого кислорода в газообразный и система становится инертной. Кислород из подпитывающей системы с давлением 1,4 кг/см? используется для вытеснительной подачи воды и гликоля из баков в агрегаты системы.