Страница:
1. Просматривается таблица файлов для того, чтобы убедиться в том, что ни одному из процессов не требуется, чтобы устройство было открыто. Чтобы установить, что вызов функции close для устройства является последним, недостаточно положиться на значение счетчика ссылок в таблице файлов, поскольку несколько процессов могут обращаться к одному и тому же устройству, используя различные точки входа в таблице файлов. Так же недос таточно положиться на значение счетчика в таблице индексов, поскольку одному и тому же устройству могут соответствовать несколько файлов устройства. Например, команда ls -l покажет, что одному и тому же устройству символьного типа ("c" в начале строки) соответствуют два файла устройства, старший и младший номера у которых (9 и 1) совпадают. Значение счетчика связей для каждого файла, равное 1, говорит о том, что имеется два индекса.
crw-w-w- 1 root vis 9, 1 Aug 6 1984 /dev/tty01
crw-w-w- 1 root unix 9, 1 May 3 15:02 /dev/tty01
Если процессы открывают оба файла независимо один от другого, они обратятся к разным индексам одного и того же устройства.
2. Если устройство символьного типа, ядро запускает процедуру закрытия устройства и возвращает управление в режим задачи. Если устройство блочного типа, ядро просматривает таблицу результатов монтирования и проверяет, не располагается ли на устройстве смонтированная файловая система. Если такая система есть, ядро не сможет запустить процедуру закрытия устройства, поскольку не был сделан последний вызов функции close для устройства. Даже если на устройстве нет смонтированной файловой системы, в буферном кеше еще могут находиться блоки с данными, оставшиеся от смонтированной ранее файловой системы и не переписанные на устройство, поскольку имели пометку "отложенная запись". Поэтому ядро просматривает буферный кеш в поисках таких блоков и переписывает их на устройство перед запуском процедуры закрытия устройства. После закрытия устройства ядро вновь просматривает буферный кеш и делает недействительными все буферы, которые содержат блоки для только что закрытого устройства, в то же вре мя позволяя буферам с актуальной информацией остаться в кеше.
3. Ядро освобождает индекс файла устройства. Короче говоря, процедура закрытия устройства разрывает связь с устройством и инициализирует заново информационные структуры драйвера и аппаратную часть устройства с тем, чтобы ядро могло бы позднее открыть устройство вновь.
10.1.2.3 Read и Writе
10.1.2.4 Стратегический интерфейс
10.1.2.5 Ioctl
10.1.2.6 Другие функции, имеющие отношение к файловой системе
10.1.3 Программы обработки прерываний
10.2 ДИСКОВЫЕ ДРАЙВЕРЫ
crw-w-w- 1 root vis 9, 1 Aug 6 1984 /dev/tty01
crw-w-w- 1 root unix 9, 1 May 3 15:02 /dev/tty01
Если процессы открывают оба файла независимо один от другого, они обратятся к разным индексам одного и того же устройства.
2. Если устройство символьного типа, ядро запускает процедуру закрытия устройства и возвращает управление в режим задачи. Если устройство блочного типа, ядро просматривает таблицу результатов монтирования и проверяет, не располагается ли на устройстве смонтированная файловая система. Если такая система есть, ядро не сможет запустить процедуру закрытия устройства, поскольку не был сделан последний вызов функции close для устройства. Даже если на устройстве нет смонтированной файловой системы, в буферном кеше еще могут находиться блоки с данными, оставшиеся от смонтированной ранее файловой системы и не переписанные на устройство, поскольку имели пометку "отложенная запись". Поэтому ядро просматривает буферный кеш в поисках таких блоков и переписывает их на устройство перед запуском процедуры закрытия устройства. После закрытия устройства ядро вновь просматривает буферный кеш и делает недействительными все буферы, которые содержат блоки для только что закрытого устройства, в то же вре мя позволяя буферам с актуальной информацией остаться в кеше.
3. Ядро освобождает индекс файла устройства. Короче говоря, процедура закрытия устройства разрывает связь с устройством и инициализирует заново информационные структуры драйвера и аппаратную часть устройства с тем, чтобы ядро могло бы позднее открыть устройство вновь.
10.1.2.3 Read и Writе
Алгоритмы чтения и записи ядром на устройстве похожи на аналогичные алгоритмы для файлов обычного типа. Если процесс производит чтение или запись на устройстве посимвольного ввода-вывода, ядро запускает процедуры read или write, определяемые типом драйвера. Несмотря на часто встречающиеся ситуации, когда ядро осуществляет передачу данных непосредственно между адресным пространством задачи и устройством, драйверы устройств могут буферизовать информацию внутри себя. Например, терминальные драйверы для буферизации данных используют символьные списки (раздел 10.3.1). В таких случаях драйвер устройства выделяет "буфер", копирует данные из пространства задачи при выполнении процедуры write и выводит их из "буфера" на устройство. Процедура записи, управляемая драйвером, регулирует объем выводимой информации (т. н. управление потоком данных): если процессы генерируют информацию быстрее, чем устройство выводит ее, процедура записи приостанавливает выполнение процессов до тех пор, пока устройство не будет готово принять следующую порцию данных. При чтении драйвер устройства помещает данные, полученные от устройства, в буфер и копирует их из буфера в пользовательские адреса, указанные в вызове системной функции.
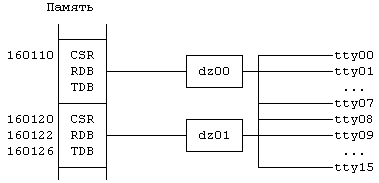 Рисунок 10.5. Отображение в памяти ввода-вывода с использованием контроллера VAX DZ11
Рисунок 10.5. Отображение в памяти ввода-вывода с использованием контроллера VAX DZ11
Конкретный метод взаимодействия драйвера с устройством определяется особенностями аппаратуры. Некоторые из машин обеспечивают отображение ввода-вывода в памяти, подразумевающее, что конкретные адреса в адресном пространстве ядра являются не номерами ячеек в физической памяти, а специальными регистрами, контролирующими соответствующие устройства. Записывая в указанные регистры управляющие параметры в соответствии со спецификациями аппаратных средств, драйвер осуществляет управление устройством. Например, контроллер ввода-вывода для машины VAX-11 содержит специальные регистры для записи информации о состоянии устройства (регистры контроля и состояния) и для передачи данных (буферные регистры), которые формируются по специальным адресам в физической памяти. В частности, терминальный контроллер VAX DZ11 управляет 8 асинхронными линиями терминальной связи (см. [Levy 80], где более подробно объясняется архитектура машин VAX). Пусть регистр контроля и состояния (CSR) для конкретного терминала DZ11 имеет адрес 160120, передающий буферный регистр (TDB) — адрес 120126, а принимающий буферный регистр (RDB) — адрес 160122 (Рисунок 10.5). Для того, чтобы передать символ на терминал "/dev/tty09", драйвер терминала записывает единицу (1 = 9 по модулю 8) в указанный двоичный разряд регистра контроля и состояния и затем записывает символ в передающий буферный регистр. Запись в передающий буферный регистр является передачей данных. Контроллер DZ11 выставляет бит "выполнено" в регистре контроля и состояния, когда готов принять следующую порцию данных. Дополнительно драйвер может выставить бит "возможно прерывание передачи" в регистре контроля и состояния, что заставляет контроллер DZ11 прерывать работу системы, когда он готов принять следующую порцию данных. Чтение данных из DZ11 производится аналогично.
На других машинах имеется программируемый ввод-вывод, подразумевающий, что в машине имеются инструкции по управлению устройствами. Драйверы управляют устройствами, выполняя соответствующие инструкции. Например, в машине IBM 370 имеется инструкция "Start I/O" (Начать ввод-вывод), которая инициирует операцию ввода-вывода, связанную с устройством. Способ связи драйвера с периферийными устройствами незаметен для пользователя.
Поскольку интерфейс между драйверами устройств и соответствующими аппаратными средствами является машинно-зависимым, на этом уровне не существует стандартных интерфейсов. Как в случае вводавывода с отображением в памяти, так и в случае программируемого ввода-вывода драйвер может посылать на устройство управляющие последовательности с целью установления режима прямого доступа в память (ПДП) для устройства. Система позволяет осуществлять массовую передачу данных между устройством и памятью в режиме ПДП параллельно с работой центрального процессора, при этом устройство прерывает работу системы по завершении передачи данных. Драйвер организует управление виртуальной памятью таким образом, чтобы ячейки памяти с их действительными номерами использовались для ПДП.
Быстродействующие устройства могут иногда передавать данные непосредственно в адресное пространство задачи, без вмешательства буфера ядра. В результате повышается скорость передачи данных, поскольку при этом производится на одну операцию копирования меньше, и, кроме того, объем данных, передаваемых за одну операцию, не ограничивается размером буферов ядра. Драйверы, осуществляющие такую передачу данных без "обработки", обычно используют блочный интерфейс для процедур посимвольного чтения и записи, если у них имеется двойник блочного типа.
Конкретный метод взаимодействия драйвера с устройством определяется особенностями аппаратуры. Некоторые из машин обеспечивают отображение ввода-вывода в памяти, подразумевающее, что конкретные адреса в адресном пространстве ядра являются не номерами ячеек в физической памяти, а специальными регистрами, контролирующими соответствующие устройства. Записывая в указанные регистры управляющие параметры в соответствии со спецификациями аппаратных средств, драйвер осуществляет управление устройством. Например, контроллер ввода-вывода для машины VAX-11 содержит специальные регистры для записи информации о состоянии устройства (регистры контроля и состояния) и для передачи данных (буферные регистры), которые формируются по специальным адресам в физической памяти. В частности, терминальный контроллер VAX DZ11 управляет 8 асинхронными линиями терминальной связи (см. [Levy 80], где более подробно объясняется архитектура машин VAX). Пусть регистр контроля и состояния (CSR) для конкретного терминала DZ11 имеет адрес 160120, передающий буферный регистр (TDB) — адрес 120126, а принимающий буферный регистр (RDB) — адрес 160122 (Рисунок 10.5). Для того, чтобы передать символ на терминал "/dev/tty09", драйвер терминала записывает единицу (1 = 9 по модулю 8) в указанный двоичный разряд регистра контроля и состояния и затем записывает символ в передающий буферный регистр. Запись в передающий буферный регистр является передачей данных. Контроллер DZ11 выставляет бит "выполнено" в регистре контроля и состояния, когда готов принять следующую порцию данных. Дополнительно драйвер может выставить бит "возможно прерывание передачи" в регистре контроля и состояния, что заставляет контроллер DZ11 прерывать работу системы, когда он готов принять следующую порцию данных. Чтение данных из DZ11 производится аналогично.
На других машинах имеется программируемый ввод-вывод, подразумевающий, что в машине имеются инструкции по управлению устройствами. Драйверы управляют устройствами, выполняя соответствующие инструкции. Например, в машине IBM 370 имеется инструкция "Start I/O" (Начать ввод-вывод), которая инициирует операцию ввода-вывода, связанную с устройством. Способ связи драйвера с периферийными устройствами незаметен для пользователя.
Поскольку интерфейс между драйверами устройств и соответствующими аппаратными средствами является машинно-зависимым, на этом уровне не существует стандартных интерфейсов. Как в случае вводавывода с отображением в памяти, так и в случае программируемого ввода-вывода драйвер может посылать на устройство управляющие последовательности с целью установления режима прямого доступа в память (ПДП) для устройства. Система позволяет осуществлять массовую передачу данных между устройством и памятью в режиме ПДП параллельно с работой центрального процессора, при этом устройство прерывает работу системы по завершении передачи данных. Драйвер организует управление виртуальной памятью таким образом, чтобы ячейки памяти с их действительными номерами использовались для ПДП.
Быстродействующие устройства могут иногда передавать данные непосредственно в адресное пространство задачи, без вмешательства буфера ядра. В результате повышается скорость передачи данных, поскольку при этом производится на одну операцию копирования меньше, и, кроме того, объем данных, передаваемых за одну операцию, не ограничивается размером буферов ядра. Драйверы, осуществляющие такую передачу данных без "обработки", обычно используют блочный интерфейс для процедур посимвольного чтения и записи, если у них имеется двойник блочного типа.
10.1.2.4 Стратегический интерфейс
Ядро использует стратегический интерфейс для передачи данных между буферным кешем и устройством, хотя, как уже говорилось ранее, процедуры чтения и записи для устройств посимвольного вводавывода иногда пользуются процедурой strategy (их двойника блочного типа) для непосредственной передачи данных между устройством и адресным пространством задачи. Процедура strategy может управлять очередностью выполнения заданий на ввод-вывод, связанный с устройством, или выполнять более сложные действия по планированию выполнения подобных заданий. Драйверы в состоянии привязывать передачу данных к одному физическому адресу или ко многим. Ядро передает адрес заголовка буфера стратегической процедуре драйвера; в заголовке содержится список адресов (страниц памяти) и размеры данных, передаваемых на или с устройства. Аналогичное действие имеет место при работе механизма свопинга, описанного в главе 9. При работе с буферным кешем ядро передает данные с одного адреса; во время свопинга ядро передает данные, расположенные по нескольким адресам (страницы памяти). Если данные копируются из или в адресное пространство задачи, драйвер должен блокировать процесс (или по крайней мере, соответствующие страницы) в памяти до завершения передачи данных.
Например, после монтирования файловой системы ядро идентифицирует каждый файл в файловой системе по номеру устройства и номеру индекса. В номере устройства закодированы его старший и младший номера. Когда ядро обращается к блоку, который принадлежит файлу, оно копирует номер устройства и номер блока в заголовок буфера, как уже говорилось ранее в главе 3. Обращения к диску, использующие алгоритмы работы с буферным кешем (например, bread или bwrite), инициируют выполнение стратегической процедуры, определяемой старшим номером устройства. Стратегическая процедура использует значения полей младшего номера и номера блока из заголовка буфера для идентификации места расположения данных на устройстве, а адрес буфера — для идентификации места назначения передаваемых данных. Точно так же, когда процесс обращается к устройству ввода-вывода блоками непосредственно (например, открывая устройство и читая или записывая на него), он использует алгоритмы работы с буферным кешем, и интерфейс при этом функционирует вышеописанным образом.
Например, после монтирования файловой системы ядро идентифицирует каждый файл в файловой системе по номеру устройства и номеру индекса. В номере устройства закодированы его старший и младший номера. Когда ядро обращается к блоку, который принадлежит файлу, оно копирует номер устройства и номер блока в заголовок буфера, как уже говорилось ранее в главе 3. Обращения к диску, использующие алгоритмы работы с буферным кешем (например, bread или bwrite), инициируют выполнение стратегической процедуры, определяемой старшим номером устройства. Стратегическая процедура использует значения полей младшего номера и номера блока из заголовка буфера для идентификации места расположения данных на устройстве, а адрес буфера — для идентификации места назначения передаваемых данных. Точно так же, когда процесс обращается к устройству ввода-вывода блоками непосредственно (например, открывая устройство и читая или записывая на него), он использует алгоритмы работы с буферным кешем, и интерфейс при этом функционирует вышеописанным образом.
10.1.2.5 Ioctl
Системная функция ioctl является обобщением специфичных для терминала функций stty (задать установки терминала) и gtty (получить установки терминала), имевшихся в ранних версиях системы UNIX. Она выступает в качестве общей точки входа для всех связанных с типом устройства команд и позволяет процессам задавать аппаратные параметры, ассоциированные с устройством, и программные параметры, ассоциированные с драйвером. Специальные действия, выполняемые функцией ioctl для разных устройств различны и определяются типом драйвера. Программы, использующие вызов ioctl, должны должны знать, с файлом какого типа они работают, так как они являются аппаратно-зависимыми. Исключение из общего правила сделано для системы, которая не видит различий между файлами разных типов. Более подробно использование функции ioctl для терминалов рассмотрено в разделе 10.3.3.
Синтаксис командной строки, содержащей вызов системной функции:
ioctl(fd, command, arg);
где fd — дескриптор файла, возвращаемый предварительно вызванной функцией open, command — действие (команда), которое необходимо выполнить драйверу, arg — параметр команды (может быть указателем на структуру). Команды специфичны для различных драйверов; следовательно, каждый драйвер интерпретирует команды в соответствии со своими внутренними спецификациями, от команды, в свою очередь, зависит формат структуры данных, описываемой передаваемым параметром. Драйверы могут считывать структуру данных arg из пространства задачи в соответствии с предопределенным форматом или записывать установки устройства в пространство задачи по адресу указанной структуры. Например, наличие интерфейса, предоставляемого функцией ioctl, дает возможность пользователям устанавливать для терминала скорость передачи информации в бодах, перематывать магнитную ленту, и, наконец, выполнять сетевые операции, задавая номера виртуальных каналов и сетевые адреса.
Синтаксис командной строки, содержащей вызов системной функции:
ioctl(fd, command, arg);
где fd — дескриптор файла, возвращаемый предварительно вызванной функцией open, command — действие (команда), которое необходимо выполнить драйверу, arg — параметр команды (может быть указателем на структуру). Команды специфичны для различных драйверов; следовательно, каждый драйвер интерпретирует команды в соответствии со своими внутренними спецификациями, от команды, в свою очередь, зависит формат структуры данных, описываемой передаваемым параметром. Драйверы могут считывать структуру данных arg из пространства задачи в соответствии с предопределенным форматом или записывать установки устройства в пространство задачи по адресу указанной структуры. Например, наличие интерфейса, предоставляемого функцией ioctl, дает возможность пользователям устанавливать для терминала скорость передачи информации в бодах, перематывать магнитную ленту, и, наконец, выполнять сетевые операции, задавая номера виртуальных каналов и сетевые адреса.
10.1.2.6 Другие функции, имеющие отношение к файловой системе
Такие функции работы с файловой системой, как stat и chmod, выполняются одинаково, как для обычных файлов, так и для устройств; они манипулируют с индексом, не обращаясь к драйверу. Даже системная функция lseek работает для устройств. Например, если процесс подводит головку на лентопротяжном устройстве к указанному адресу смещения в байтах с помощью функции lseek, ядро корректирует смещение в таблице файлов но не выполняет никаких действий, специфичных для данного типа драйвера. Когда позднее процесс выполняет чтение (read) или запись (write), ядро пересылает адрес смещения из таблицы файлов в адресное пространство задачи, подобно тому, как это имеет место при работе с файлами обычного типа, и устройство физически перемещает головку к соответствующему смещению, указанному в пространстве задачи. Этот случай иллюстрируется на примере в разделе 10.3.
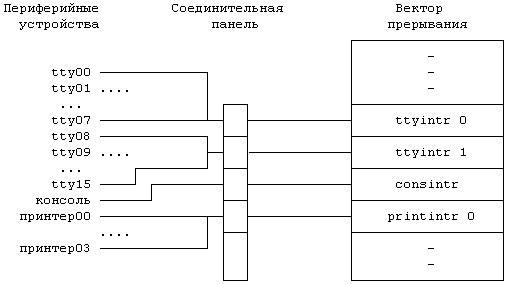 Рисунок 10.6. Прерывания от устройств
Рисунок 10.6. Прерывания от устройств
10.1.3 Программы обработки прерываний
Как уже говорилось выше (раздел 6.4.1), возникновение прерывания побуждает ядро запускать программу обработки прерываний, в основе алгоритма которой лежит соотношение между устройством, вызвавшим прерывание, и смещением в таблице векторов прерываний. Ядро запускает программу обработки прерываний для данного типа устройства, передавая ей номер устройства или другие параметры для того, чтобы идентифицировать единицу устройства, вызвавшую прерывание. Например, в таблице векторов прерываний на Рисунке 10.6 показаны две точки входа для обработки прерываний от терминалов ("ttyintr"), каждая из которых используется для обработки прерываний, поступивших от 8 терминалов. Если устройство tty09 прервало работу системы, система вызывает программу обработки прерывания, ассоциированную с местом аппаратного подключения устройства. Поскольку с одной записью в таблице векторов прерываний может быть связано множество физических устройств, драйвер должен уметь распознавать устройство, вызвавшее прерывание. На рисунке записи в таблице векторов прерываний, соответствующие прерываниям от терминалов, имеют метки 0 и 1, чтобы система различала их между собой при вызове программы обработки прерываний, используя к примеру этот номер в качестве передаваемого программе параметра. Программа обработки прерываний использует этот номер и другую информацию, переданную механизмом прерывания, для того, чтобы удостовериться, что именно устройство tty09, а не tty12, прервало работу системы. Этот пример в упрощенном виде показывает то, что имеет место в реальных системах, где на самом деле существует несколько уровней контроллеров и соответствующих программ обработки прерываний, но он иллюстрирует общие принципы.
Если подвести итог, можно сказать, что номер устройства, используемый программой обработки прерываний, идентифицирует единицу аппаратуры, а младший номер в файле устройства идентифицирует устройство для ядра. Драйвер устройства устанавливает соответствие между младшим номером устройства и номером единицы аппаратуры.
Если подвести итог, можно сказать, что номер устройства, используемый программой обработки прерываний, идентифицирует единицу аппаратуры, а младший номер в файле устройства идентифицирует устройство для ядра. Драйвер устройства устанавливает соответствие между младшим номером устройства и номером единицы аппаратуры.
10.2 ДИСКОВЫЕ ДРАЙВЕРЫ
Так сложилось исторически, что дисковые устройства в системах UNIX разбивались на разделы, содержащие различные файловые системы, что означало "деление [дискового] пакета на несколько управляемых по-своему частей" (см. [System V 84b]). Например, если на диске располагаются четыре файловые системы, администратор может оставить одну из них несмонтированной, одну смонтировать только для чтения, а две других только для записи. Несмотря на то, что все файловые системы сосуществуют на одном физическом устройстве, пользователи не могут ни обращаться к файлам немонтированной файловой системы, используя методы доступа, описанные в главах 4 и 5, ни записывать файлы в файловые системы, смонтированные только для чтения. Более того, так как каждый раздел (и, следовательно, файловая система) занимает на диске смежные дорожки и цилиндры, скопировать всю файловую систему легче, чем в том случае, если бы раздел занимал участки, разбросанные по всему дисковому тому.
Дисковый драйвер транслирует адрес файловой системы, состоящий из логического номера устройства и номера блока, в точный номер дискового сектора. Драйвер получает адрес одним из следующих путей: либо стратегическая процедура использует буфер из буферного пула, заголовок которого содержит номера устройства и блока, либо процедуры чтения и записи передают логический (младший) номер устройства в качестве параметра; они преобразуют адрес смещения в байтах, хранящийся в пространстве задачи, в адрес соответствующего блока. Дисковый драйвер использует номер устройства для идентификации физического устройства и указания используемого раздела, обращаясь при этом к внутренним таблицам для поиска сектора, отмечающего начало раздела на диске. Наконец, он добавляет номер блока в файловой системе к номеру блока, с которого начинается каждый сектор, чтобы идентифицировать сектор, используемый для ввода-вывода.
 Рисунок 10.7. Разделы на диске RP07
Рисунок 10.7. Разделы на диске RP07
Исторически сложилось так, что размеры дисковых разделов устанавливаются в зависимости от типа диска. Например, диск DEC RP07 разбит на разделы, характеристика которых приведена на Рисунке 10.7. Предположим, что файлы "/dev/dsk0", "/dev/dsk1", "/dev/dsk2" и "/dev/dsk3" соответствуют разделам диска RP07, имеющим номера от 0 до 3, и имеют аналогичные младшие номера. Пусть размер логического блока в файловой системе совпадает с размером дискового блока. Если ядро пытается обратиться к блоку с номером 940 в файловой системе, хранящейся в "/dev/dsk3", дисковый драйвер переадресует запрос к блоку с номером 336940 (раздел 3 начинается с блока, имеющего номер 336000; 336000 + 940 = 336940) на диске.
Размеры разделов на диске варьируются и администраторы располагают файловые системы в разделах соответствующего размера: большие файловые системы попадают в разделы большего размера и т. д. Разделы на диске могут перекрываться. Например, разделы 0 и 1 на диске RP07 не пересекаются, но вместе они занимают блоки с номерами от 0 до 1008000, то есть весь диск. Раздел 7 так же занимает весь диск. Перекрытие разделов не имеет значения, поскольку файловые системы, хранящиеся в разделах, размещаются таким образом, что между ними нет пересечений. Иметь один раздел, включающий в себя все дисковое пространство, выгодно, поскольку весь том можно быстро скопировать.
Использование разделов фиксированного состава и размера ограничивает гибкость дисковой конфигурации. Информацию о разделах в закодированном виде не следует включать в дисковый драйвер, но нужно поместить в таблицу содержимого дискового тома. Однако, найти общее место на всех дисках для размещения таблицы содержимого дискового тома и сохранить тем самым совместимость с предыдущими версиями системы довольно трудно. В существующих реализациях версии V предполагается, что блок начальной загрузки первой из файловых систем на диске занимает первый сектор тома, хотя по логике это, казалось бы, самое подходящее место для таблицы содержимого тома. И все же дисковый драйвер должен иметь закодированную информацию о месте расположения таблицы содержимого тома для каждого диска, не препятствуя существованию дисковых разделов переменного размера.
В связи с тем, что для системы UNIX является типичным высокий уровень дискового трафика, драйвер диска должен максимизировать передачу данных с тем, чтобы обеспечить наилучшую производительность всей системы. Новейшие дисковые контроллеры осуществляют планирование выполнения заданий, требующих обращения к диску, позиционируют головку диска и обеспечивают передачу данных между диском и центральным процессором; иначе это приходится делать дисковому драйверу.
Сервисные программы могут непосредственно обращаться к диску в обход стандартного метода доступа к файловой системе, рассмотренного в главах 4 и 5, как пользуясь блочным интерфейсом, так и не прибегая к структурированию данных. Непосредственно работают с диском две важные программы — mkfs и fsck. Программа mkfs форматирует раздел диска для файловой системы UNIX, создавая при этом суперблок, список индексов, список свободных дисковых блоков с указателями и корневой каталог новой файловой системы. Программа fsck проверяет целостность существующей файловой системы и исправляет ошибки, как показано в главе 5.
Рассмотрим программу, приведенную на Рисунке 10.8, в применении к файлам "/dev/dsk15" и "/dev/rdsk15", и предположим, что команда ls выдала следующую информацию:
ls -l /dev/dsk15 /dev/rdsk15
br-------- 2 root root 0,21 Feb 12 15:40 /dev/dsk15
crw-rw---- 2 root root 7,21 Mar 7 09:29 /dev/rdsk15
Отсюда видно, что файл "/dev/dsk15" соответствует устройству блочного типа, владельцем которого является пользователь под именем "root", и только пользователь "root" может читать с него непосредственно. Его старший номер 0, младший — 21. Файл "/dev/rdsk15" соответствует устройству посимвольного ввода-вывода, владельцем которого является пользователь "root", однако права доступа к которому на запись и чтение есть как у владельца, так и у группы. Его старший номер — 7, младший — 21. Процесс, открывающий файлы, получает доступ к устройству через таблицу ключей устройств ввода-вывода блоками и таблицу ключей устройств посимвольного ввода-вывода, соответственно, а младший номер устройства 21 информирует драйвер о том, к какому разделу диска производится обращение, например, дисковод 2, раздел 1. Поскольку младшие номера у файлов совпадают, они ссылаются на один и тот же раздел диска, если предположить, что это одно устройство [31]. Таким образом, процесс, выполняющий программу, открывает один и тот же драйвер дважды (используя различные интерфейсы), позиционирует головку к смещению с адресом 8192 и считывает данные с этого места. Результаты выполнения операций чтения должны быть идентичными при условии, что работает только одна файловая система.
#include "fcntl.h"
main() {
char buf1[4096], buf2[4096];
int fd1, fd2, i;
if (((fd1 = open("/dev/dsk5/", O_RDONLY)) == -1) || ((fd2 = open("/dev/rdsk5", O_RDONLY)) == -1)) {
printf("ошибка при открытии\n");
exit();
}
lseek(fd1, 8192L, 0);
lseek(fd2, 8192L, 0);
if ((read(fd1, buf1, sizeof(buf1)) == -1) || (read(fd2, buf2, sizeof(buf2)) == -1)) {
printf("ошибка при чтении\n");
exit();
}
for (i = 0; i ‹ sizeof(buf1); i++) if (buf1[i] != buf2[i]) {
printf("различие в смещении %d\n", i);
exit();
}
printf("данные совпадают\n");
}
Рисунок 10.8. Чтение данных с диска с использованием блочного интерфейса и без структурирования данных
Программы, осуществляющие чтение и запись на диск непосредственно, представляют опасность, поскольку манипулируют с чувствительной информацией, рискуя нарушить системную защиту. Администраторам следует защищать интерфейсы ввода-вывода путем установки прав доступа к файлам дисковых устройств. Например, дисковые файлы "/dev/dsk15" и "/dev/rdsk15" должны принадлежать пользователю с именем "root", и права доступа к ним должны быть определены таким образом, чтобы пользователю "root" было разрешено чтение, а всем остальным пользователям и чтение, и запись должны быть запрещены.
Программы, осуществляющие чтение и запись на диск непосредственно, могут также нарушить целостность данных в файловой системе. Алгоритмы файловой системы, рассмотренные в главах 3, 4 и 5, координируют выполнение операций ввода-вывода, связанных с диском, тем самым поддерживая целостность информационных структур на диске, в том числе списка свободных дисковых блоков и указателей из индексов на информационные блоки прямой и косвенной адресации. Процессы, обращающиеся к диску непосредственно, обходят эти алгоритмы. Пусть даже их программы написаны с большой осторожностью, проблема целостности все равно не исчезнет, если они выполняются параллельно с работой другой файловой системы. По этой причине программа fsck не должна выполняться при наличии активной файловой системы.
Два типа дискового интерфейса различаются между собой по использованию буферного кеша. При работе с блочным интерфейсом ядро пользуется тем же алгоритмом, что и для файлов обычного типа, исключение составляет тот момент, когда после преобразования адреса смещения логического байта в адрес смещения логического блока (см. алгоритм bmap в главе 4) оно трактует адрес смещения логического блока как физический номер блока в файловой системе. Затем, используя буферный кеш, ядро обращается к данным, и, в конечном итоге, к стратегическому интерфейсу драйвера. Однако, при обращении к диску через символьный интерфейс (без структурирования данных), ядро не превращает адрес смещения в адрес файла, а передает его немедленно драйверу, используя для передачи рабочее пространство задачи. Процедуры чтения и записи, входящие в состав драйвера, преобразуют смещение в байтах в смещение в блоках и копируют данные непосредственно в адресное пространство задачи, минуя буферы ядра.
Таким образом, если один процесс записывает на устройство блочного типа, а второй процесс затем считывает с устройства символьного типа по тому же адресу, второй процесс может не считать информацию, записанную первым процессом, так как информация может еще находиться в буферном кеше, а не на диске. Тем не менее, если второй процесс обратится к устройству блочного типа, он автоматически попадет на новые данные, находящиеся в буферном кеше.
При использовании символьного интерфейса можно столкнуться со странной ситуацией. Если процесс читает или пишет на устройство посимвольного ввода-вывода порциями меньшего размера, чем, к примеру, блок, результаты будут зависеть от драйвера. Например, если производить запись на ленту по 1 байту, каждый байт может попасть в любой из ленточных блоков.
Дисковый драйвер транслирует адрес файловой системы, состоящий из логического номера устройства и номера блока, в точный номер дискового сектора. Драйвер получает адрес одним из следующих путей: либо стратегическая процедура использует буфер из буферного пула, заголовок которого содержит номера устройства и блока, либо процедуры чтения и записи передают логический (младший) номер устройства в качестве параметра; они преобразуют адрес смещения в байтах, хранящийся в пространстве задачи, в адрес соответствующего блока. Дисковый драйвер использует номер устройства для идентификации физического устройства и указания используемого раздела, обращаясь при этом к внутренним таблицам для поиска сектора, отмечающего начало раздела на диске. Наконец, он добавляет номер блока в файловой системе к номеру блока, с которого начинается каждый сектор, чтобы идентифицировать сектор, используемый для ввода-вывода.
Исторически сложилось так, что размеры дисковых разделов устанавливаются в зависимости от типа диска. Например, диск DEC RP07 разбит на разделы, характеристика которых приведена на Рисунке 10.7. Предположим, что файлы "/dev/dsk0", "/dev/dsk1", "/dev/dsk2" и "/dev/dsk3" соответствуют разделам диска RP07, имеющим номера от 0 до 3, и имеют аналогичные младшие номера. Пусть размер логического блока в файловой системе совпадает с размером дискового блока. Если ядро пытается обратиться к блоку с номером 940 в файловой системе, хранящейся в "/dev/dsk3", дисковый драйвер переадресует запрос к блоку с номером 336940 (раздел 3 начинается с блока, имеющего номер 336000; 336000 + 940 = 336940) на диске.
Размеры разделов на диске варьируются и администраторы располагают файловые системы в разделах соответствующего размера: большие файловые системы попадают в разделы большего размера и т. д. Разделы на диске могут перекрываться. Например, разделы 0 и 1 на диске RP07 не пересекаются, но вместе они занимают блоки с номерами от 0 до 1008000, то есть весь диск. Раздел 7 так же занимает весь диск. Перекрытие разделов не имеет значения, поскольку файловые системы, хранящиеся в разделах, размещаются таким образом, что между ними нет пересечений. Иметь один раздел, включающий в себя все дисковое пространство, выгодно, поскольку весь том можно быстро скопировать.
Использование разделов фиксированного состава и размера ограничивает гибкость дисковой конфигурации. Информацию о разделах в закодированном виде не следует включать в дисковый драйвер, но нужно поместить в таблицу содержимого дискового тома. Однако, найти общее место на всех дисках для размещения таблицы содержимого дискового тома и сохранить тем самым совместимость с предыдущими версиями системы довольно трудно. В существующих реализациях версии V предполагается, что блок начальной загрузки первой из файловых систем на диске занимает первый сектор тома, хотя по логике это, казалось бы, самое подходящее место для таблицы содержимого тома. И все же дисковый драйвер должен иметь закодированную информацию о месте расположения таблицы содержимого тома для каждого диска, не препятствуя существованию дисковых разделов переменного размера.
В связи с тем, что для системы UNIX является типичным высокий уровень дискового трафика, драйвер диска должен максимизировать передачу данных с тем, чтобы обеспечить наилучшую производительность всей системы. Новейшие дисковые контроллеры осуществляют планирование выполнения заданий, требующих обращения к диску, позиционируют головку диска и обеспечивают передачу данных между диском и центральным процессором; иначе это приходится делать дисковому драйверу.
Сервисные программы могут непосредственно обращаться к диску в обход стандартного метода доступа к файловой системе, рассмотренного в главах 4 и 5, как пользуясь блочным интерфейсом, так и не прибегая к структурированию данных. Непосредственно работают с диском две важные программы — mkfs и fsck. Программа mkfs форматирует раздел диска для файловой системы UNIX, создавая при этом суперблок, список индексов, список свободных дисковых блоков с указателями и корневой каталог новой файловой системы. Программа fsck проверяет целостность существующей файловой системы и исправляет ошибки, как показано в главе 5.
Рассмотрим программу, приведенную на Рисунке 10.8, в применении к файлам "/dev/dsk15" и "/dev/rdsk15", и предположим, что команда ls выдала следующую информацию:
ls -l /dev/dsk15 /dev/rdsk15
br-------- 2 root root 0,21 Feb 12 15:40 /dev/dsk15
crw-rw---- 2 root root 7,21 Mar 7 09:29 /dev/rdsk15
Отсюда видно, что файл "/dev/dsk15" соответствует устройству блочного типа, владельцем которого является пользователь под именем "root", и только пользователь "root" может читать с него непосредственно. Его старший номер 0, младший — 21. Файл "/dev/rdsk15" соответствует устройству посимвольного ввода-вывода, владельцем которого является пользователь "root", однако права доступа к которому на запись и чтение есть как у владельца, так и у группы. Его старший номер — 7, младший — 21. Процесс, открывающий файлы, получает доступ к устройству через таблицу ключей устройств ввода-вывода блоками и таблицу ключей устройств посимвольного ввода-вывода, соответственно, а младший номер устройства 21 информирует драйвер о том, к какому разделу диска производится обращение, например, дисковод 2, раздел 1. Поскольку младшие номера у файлов совпадают, они ссылаются на один и тот же раздел диска, если предположить, что это одно устройство [31]. Таким образом, процесс, выполняющий программу, открывает один и тот же драйвер дважды (используя различные интерфейсы), позиционирует головку к смещению с адресом 8192 и считывает данные с этого места. Результаты выполнения операций чтения должны быть идентичными при условии, что работает только одна файловая система.
#include "fcntl.h"
main() {
char buf1[4096], buf2[4096];
int fd1, fd2, i;
if (((fd1 = open("/dev/dsk5/", O_RDONLY)) == -1) || ((fd2 = open("/dev/rdsk5", O_RDONLY)) == -1)) {
printf("ошибка при открытии\n");
exit();
}
lseek(fd1, 8192L, 0);
lseek(fd2, 8192L, 0);
if ((read(fd1, buf1, sizeof(buf1)) == -1) || (read(fd2, buf2, sizeof(buf2)) == -1)) {
printf("ошибка при чтении\n");
exit();
}
for (i = 0; i ‹ sizeof(buf1); i++) if (buf1[i] != buf2[i]) {
printf("различие в смещении %d\n", i);
exit();
}
printf("данные совпадают\n");
}
Рисунок 10.8. Чтение данных с диска с использованием блочного интерфейса и без структурирования данных
Программы, осуществляющие чтение и запись на диск непосредственно, представляют опасность, поскольку манипулируют с чувствительной информацией, рискуя нарушить системную защиту. Администраторам следует защищать интерфейсы ввода-вывода путем установки прав доступа к файлам дисковых устройств. Например, дисковые файлы "/dev/dsk15" и "/dev/rdsk15" должны принадлежать пользователю с именем "root", и права доступа к ним должны быть определены таким образом, чтобы пользователю "root" было разрешено чтение, а всем остальным пользователям и чтение, и запись должны быть запрещены.
Программы, осуществляющие чтение и запись на диск непосредственно, могут также нарушить целостность данных в файловой системе. Алгоритмы файловой системы, рассмотренные в главах 3, 4 и 5, координируют выполнение операций ввода-вывода, связанных с диском, тем самым поддерживая целостность информационных структур на диске, в том числе списка свободных дисковых блоков и указателей из индексов на информационные блоки прямой и косвенной адресации. Процессы, обращающиеся к диску непосредственно, обходят эти алгоритмы. Пусть даже их программы написаны с большой осторожностью, проблема целостности все равно не исчезнет, если они выполняются параллельно с работой другой файловой системы. По этой причине программа fsck не должна выполняться при наличии активной файловой системы.
Два типа дискового интерфейса различаются между собой по использованию буферного кеша. При работе с блочным интерфейсом ядро пользуется тем же алгоритмом, что и для файлов обычного типа, исключение составляет тот момент, когда после преобразования адреса смещения логического байта в адрес смещения логического блока (см. алгоритм bmap в главе 4) оно трактует адрес смещения логического блока как физический номер блока в файловой системе. Затем, используя буферный кеш, ядро обращается к данным, и, в конечном итоге, к стратегическому интерфейсу драйвера. Однако, при обращении к диску через символьный интерфейс (без структурирования данных), ядро не превращает адрес смещения в адрес файла, а передает его немедленно драйверу, используя для передачи рабочее пространство задачи. Процедуры чтения и записи, входящие в состав драйвера, преобразуют смещение в байтах в смещение в блоках и копируют данные непосредственно в адресное пространство задачи, минуя буферы ядра.
Таким образом, если один процесс записывает на устройство блочного типа, а второй процесс затем считывает с устройства символьного типа по тому же адресу, второй процесс может не считать информацию, записанную первым процессом, так как информация может еще находиться в буферном кеше, а не на диске. Тем не менее, если второй процесс обратится к устройству блочного типа, он автоматически попадет на новые данные, находящиеся в буферном кеше.
При использовании символьного интерфейса можно столкнуться со странной ситуацией. Если процесс читает или пишет на устройство посимвольного ввода-вывода порциями меньшего размера, чем, к примеру, блок, результаты будут зависеть от драйвера. Например, если производить запись на ленту по 1 байту, каждый байт может попасть в любой из ленточных блоков.