Страница:
Г. с. устанавливают на подводных лодках, военных надводных кораблях (
рис. 2
), вертолётах, на береговых объектах для решения задач противолодочной обороны, поиска противника, связи подводных лодок друг с другом и с надводными кораблями, выработки данных для пуска ракето-торпед и торпед, безопасности плавания и др. На транспортных, промысловых и исследовательских судах Г. с. применяют для навигационных нужд, поиска скоплений рыбы, проведения океанографических и гидрологических работ, связи с водолазами и др. целей.
Лит.:Карлов Л. Б., Шошков Е. Н., Гидроакустика в военном деле, М., 1963; Простаков А. Л., Гидроакустика в иностранных флотах, Л., 1964; его же, Гидроакустика и корабль, Л., 1967; Краснов В. Н., Локация с подводной лодки, М., 1968; Хортон Дж., Основы гидролокации, пер. с англ., Л., 1961.
С. А. Барченков.
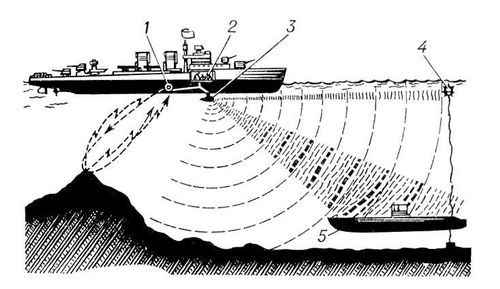 Рис. 2. Схема работы гидроакустических станций надводного корабля: 1 — преобразователь эхолота; 2 — пост гидроакустиков; 3 — преобразователь гидролокатора; 4 — обнаруженная мина; 5 — обнаруженная подводная лодка.
Рис. 2. Схема работы гидроакустических станций надводного корабля: 1 — преобразователь эхолота; 2 — пост гидроакустиков; 3 — преобразователь гидролокатора; 4 — обнаруженная мина; 5 — обнаруженная подводная лодка.
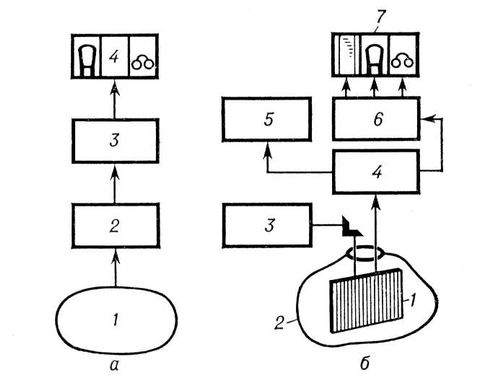 Рис. 1. Упрощённая блок-схема гидроакустической станции: а — шумопеленгатора (1 — неподвижная акустическая система, 2 — компенсатор, 3 — усилитель, 4 — индикаторное устройство); б — гидролокатора (1 — подвижная акустическая система, 2 — обтекатель, 3 — поворотное устройство, 4 — переключатель «приём-передача», 5 — генератор, 6 — усилитель, 7 — индикаторное устройство).
Рис. 1. Упрощённая блок-схема гидроакустической станции: а — шумопеленгатора (1 — неподвижная акустическая система, 2 — компенсатор, 3 — усилитель, 4 — индикаторное устройство); б — гидролокатора (1 — подвижная акустическая система, 2 — обтекатель, 3 — поворотное устройство, 4 — переключатель «приём-передача», 5 — генератор, 6 — усилитель, 7 — индикаторное устройство).
гидроакустические станции
. Применяют также специальные приёмные
гидрофоны
, у которых, в зависимости от выполняемой задачи (поиск торпеды, выход на десантный маяк и др.), положение характеристики направленности в горизонтальной или вертикальной плоскости можно изменять в некоторых пределах для обеспечения наибольшего уровня сигналов.
Лит.:Карлов Л. Б., Шошков Е. Н., Гидроакустика в военном деле, М., 1963; Простаков А. Л., Гидроакустика в иностранных флотах, Л., 1964; его же, Гидроакустика и корабль, Л., 1967; Краснов В. Н., Локация с подводной лодки, М., 1968; Хортон Дж., Основы гидролокации, пер. с англ., Л., 1961.
С. А. Барченков.