Страница:
Г. впервые были применены в России для добычи золота на Урале (1830), позднее (1880) К. Ф. Пеньевский на р. Ныгри для размыва торфа использовал Г., изготовленные из парусиновых труб и рассчитанные на работу при давлении 0,6—0,9
Мн/м
2(6—9
кгс/см
2. Г. состоит (
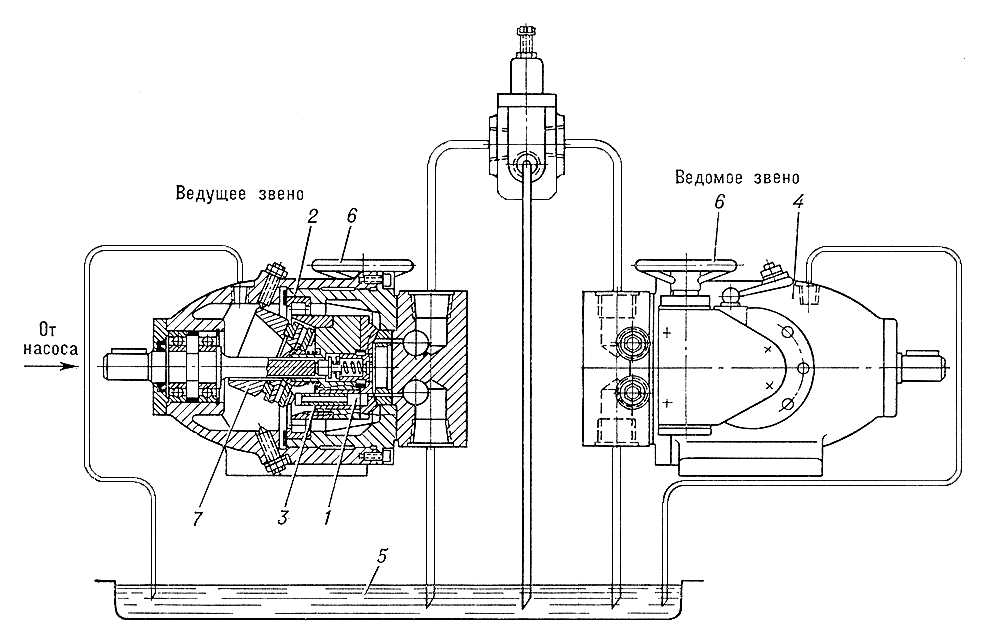
рис. 1
) из нижнего неподвижного колена
1и верхнего колена
2, которое может вращаться вокруг вертикальной оси благодаря шарнирному устройству. Ствол
3Г. может отклоняться от горизонтальной плоскости вверх и вниз при помощи шарового шарнира. Вода в Г. подводится по трубопроводу под давлением (от насосной станции) и через систему колен и шарниров попадает в ствол, имеющий конусность 3—5° в направлении движения потока воды. Ствол оканчивается насадкой
4, в которой формируется струя воды. Размытая гидромониторной струей порода в виде гидросмеси транспортируется самотёком или грунтовыми насосами.
Г. разделяются: по назначению — для открытых работ, подземных работ ( рис. 2 ) и специального назначения: по технологическим признакам — на врубовые и смывные; по создаваемому напору — на высоко- и низконапорные; по способу управления — на управляемые вручную и с дистанционным управлением; по расположению в забое — на работающие непосредственно у забоя (Г. ближнего боя) и на работающие вне контура обрушения уступа.
Развитие техники гидромониторостроения происходит преимущественно в направлении создания самоходных Г. с дистанционным управлением.
Лит.:Цяпко Н. Ф., Чапка А. М., Гидроотбойка угля на подземных работах, М., 1960; Нурок Г. А., Гидромеханизация открытых разработок, М., 1970.
В. И. Шелоганов.
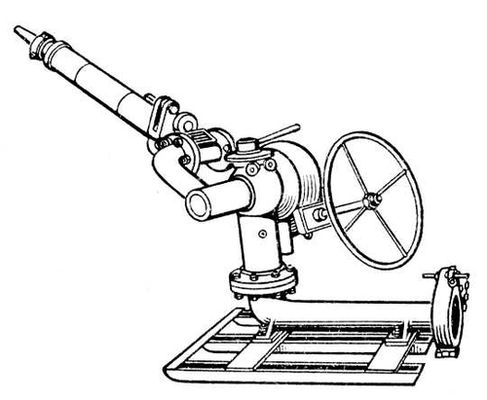 Рис. 2. Гидромонитор для подземных работ.
Рис. 2. Гидромонитор для подземных работ.
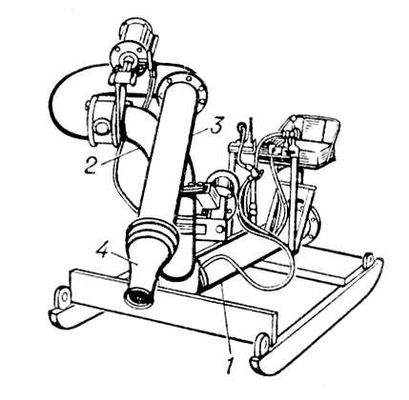 Рис. 1. Гидромонитор с дистанционным управлением.
Рис. 1. Гидромонитор с дистанционным управлением.
Гидродинамическая передача
.
Г. разделяются: по назначению — для открытых работ, подземных работ ( рис. 2 ) и специального назначения: по технологическим признакам — на врубовые и смывные; по создаваемому напору — на высоко- и низконапорные; по способу управления — на управляемые вручную и с дистанционным управлением; по расположению в забое — на работающие непосредственно у забоя (Г. ближнего боя) и на работающие вне контура обрушения уступа.
Развитие техники гидромониторостроения происходит преимущественно в направлении создания самоходных Г. с дистанционным управлением.
Лит.:Цяпко Н. Ф., Чапка А. М., Гидроотбойка угля на подземных работах, М., 1960; Нурок Г. А., Гидромеханизация открытых разработок, М., 1970.
В. И. Шелоганов.
 Ион H
3O
+в кристаллах носит название оксония (в отличие от Г. — иона H
3O
+в растворе). Вследствие ассоциации молекул воды ион Г. оказывается связанным с большим количеством воды. Получающиеся при этом гидратированные ионы Г. выражают формулами H
5O
2
+, H
7O
3
+, H
9O
4
+.
Ион H
3O
+в кристаллах носит название оксония (в отличие от Г. — иона H
3O
+в растворе). Вследствие ассоциации молекул воды ион Г. оказывается связанным с большим количеством воды. Получающиеся при этом гидратированные ионы Г. выражают формулами H
5O
2
+, H
7O
3
+, H
9O
4
+.