Страница:
6и вычислительного устройства 7, вырабатывающего момент азимутальной коррекции. При этом учитываются поправки на вращение Земли и на движение объекта относительно Земли. Азимутальная коррекция Г. н. может также осуществляться от чувствительного элемента, обладающего избирательностью по отношению к стабилизируемому направлению, например от магнитной стрелки (см.
Гиромагнитный компас
). Потенциометр
8служит для съёма углов рыскания и поворота объекта вокруг вертикальной оси. Погрешности Г. н. характеризуются уходами оси гироскопа в азимуте, которые могут составлять от единиц до десятых долей градуса в час.">Гироскоп направления
.
авторулевой
.
авторулевой
.
гиро...
и
...скоп
), быстро вращающееся твёрдое тело, ось вращения которого может изменять своё направление в пространстве. Г. обладает рядом интересных свойств, наблюдаемых у вращающихся небесных тел, у артиллерийских снарядов, у детского волчка, у роторов турбин, установленных на судах, и др. На свойствах Г. основаны разнообразные устройства или приборы, широко применяемые в современной технике для автоматического управления движением самолётов, морских судов, ракет, торпед и др. объектов, для определения горизонта или географического меридиана, для измерения поступательных или угловых скоростей движущихся объектов (например, ракет) и многое др.
Свойства Г. проявляются при выполнении двух условий: 1) ось вращения Г. должна иметь возможность изменять своё направление в пространстве; 2) угловая скорость вращения Г. вокруг своей оси должна быть очень велика по сравнению с той угловой скоростью, которую будет иметь сама ось при изменении своего направления.
Простейшим Г. является детский волчок, быстро вращающийся вокруг своей оси
ОА(
рис. 1
); ось
ОАможет изменять своё положение в пространстве, поскольку её конец
Ане закреплен. У Г., применяемых в технике, свободный поворот оси Г. можно обеспечить, закрепив сё в рамках (кольцах) 1,
2т. н. карданова подвеса (
рис. 2
), позволяющего оси
АВзанять любое положение в пространстве. Такой Г. имеет 3 степени свободы: он может совершать 3 независимых поворота вокруг осей
АВ,
DEи
GK, пересекающихся в центре подвеса О, который остаётся по отношению к основанию
3неподвижным. Если центр тяжести Г. совпадает с центром О, то Г. называется астатическим (уравновешенным), в противном случае — тяжёлым.
Первое свойство уравновешенного Г. с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление. Если эта ось вначале направлена на какую-нибудь звезду, то при любых перемещениях основания прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно земных осей. Впервые это свойство Г. использовал французский учёный Л. Фуко для экспериментального доказательства вращения Земли вокруг её оси (1852). Отсюда и само название «Г.», что в переводе означает «наблюдать вращение».
Второе свойство Г. обнаруживается, когда на его ось (или рамку) начинают действовать сила или пара сил, стремящиеся привести ось в движение (т. е. создающие вращающий момент относительно центра подвеса). Под действием силы
Р(
рис. 3
) конец
Аоси
АВГ. будет отклонять не в сторону действия силы, как это было бы при невращающемся роторе, а в направлении, перпендикулярном к этой силе; в результате Г. вместе с рамкой 1 начнёт вращаться вокруг оси
DE, притом не ускоренно, а с постоянной угловой скоростью. Это вращение называется прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси
АВсам Г. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия и ось
АВмгновенно остановится, т. е. прецессионное движение Г. безынерционно.
Величина угловой скорости прецессии определяется по формуле:

где
М— момент силы
Рцентра О, a = б
АОЕ, W — угловая скорость собственного вращения Г. вокруг оси
АВ,
I— момент инерции Г. относительно той же оси,
h = АО— расстояние от точки приложения силы до центра подвеса Г.; второе равенство имеет место, когда сила
Рпараллельна оси
DE. Из формулы (1) непосредственно видно, что прецессия происходит тем медленнее, чем больше W, точнее, чем больше величина
H=
IW, называется собственным кинетическим моментом Г. Как найти направление прецессии Г. см.
рис. 4
.
Наряду с прецессией ось Г. при действии на неё силы может ещё совершать т. н. нутацию — небольшие, но быстрые (обычно незаметные на глаз) колебания оси около её среднего направления. Размахи этих колебаний у быстро вращающегося Г. очень малы и из-за неизбежного наличия сопротивлений быстро затухают. Это позволяет при решении большинства технических задач пренебречь нутацией и построить т. н. элементарную теорию Г., учитывающую только прецессию, скорость которой определяется формулой (1). Прецессионное движение можно наблюдать у детского волчка (
рис. 5
, а), для которого роль центра подвеса играет точка опоры О. Если ось такого волчка поставить под углом
АОЕк вертикали и отпустить, то она под действием силы тяжести
Рбудет отклоняться не в сторону действия этой силы, т. е. не вниз, а в перпендикулярном направлении, и начинает прецессировать вокруг вертикали. Прецессия волчка также сопровождается незаметными на глаз нутационными колебаниями, быстро затухающими из-за сопротивления воздуха. Под действием трения о воздух собственное вращение волчка постепенно замедляется, а скорость прецессии
wсоответственно возрастает. Когда угловая скорость вращения волчка становится меньше определенной величины, он теряет устойчивость и падает. У медленно вращающегося волчка нутационные колебания могут быть довольно заметными и, слагаясь с прецессией, существенно изменить картину движения оси волчка: конец
Аоси будет описывать ясно видимую волнообразную или петлеобразную кривую, то отклоняясь от вертикали, то приближаясь к ней (
рис. 5
, б).
Другой пример прецессионного движения даёт артиллерийский снаряд (или пуля). На снаряд при его движении, кроме силы тяжести, действуют силы сопротивления воздуха, равнодействующая
Rкоторых направлена примерно противоположно скорости центра тяжести снаряда и приложена выше центра тяжести (
рис. 6
, а). Невращающийся снаряд под действием силы сопротивления воздуха будет «кувыркаться» и его полёт станет беспорядочным (
рис. 6
, б); при этом значительно возрастет сопротивление движению, уменьшится дальность полёта и снаряд не попадёт в цель головной частью. Вращающийся же снаряд обладает всеми свойствами Г., и сила сопротивления воздуха вызывает отклонение его оси не в сторону действия этой силы, а в перпендикулярном направлении. В результате ось снаряда медленно прецессирует вокруг прямой, по которой направлена скорость
v
c, т. е. вокруг касательной к траектории центра тяжести снаряда (
рис. 6
, в), что делает полёт правильным и обеспечивает на нисходящей ветви траектории попадание снаряда в цель головной частью.
Наша планета Земля также является гигантским Г., совершающим прецессию (подробнее см.
Прецессия
в астрономии).
Если ось
АВротора Г. закрепить в одной рамке, которая может вращаться по отношению к основанию прибора вокруг оси
DE(
рис. 7
), то Г. будет иметь возможность участвовать только в двух вращениях — вокруг осей
АВи
DE, т. е. будет иметь две степени свободы. Такой Г. не обладает ни одним из свойств Г. с тремя степенями свободы, однако у него есть другое очень интересное свойство: если основанию Г. сообщить вынужденное вращение с угловой скоростью
wвокруг оси
KL, образующей угол
aс осью
АВ, то на ось ротора со стороны подшипников
Аи
Вначнёт действовать пара сил с гироскопическим моментом
М
гир=
IWw sin a. (2)
Эта пара стремится кратчайшим путём установить ось ротора Г. параллельно оси
KL, причём так, чтобы и вращение ротора, и вынужденное вращение были видны происходящими в одну и ту же сторону.
Рассмотрим, наконец, ротор, ось
АВкоторого непосредственно закреплена в основании
D(
рис. 8
). Если это основание неподвижно, то ось не может изменять своё направление в пространстве и, следовательно, ротор никакими свойствами Г. не обладает. Однако если вращать основание вокруг некоторой оси
KLс угловой скоростью
w, то по предыдущему правилу ось
АВбудет стремиться установиться параллельно оси
KL. Этому движению препятствуют подшипники, в которых закреплена ось. В результате ротор будет давить на подшипники
Аи
Вс силами
F
1
и
F
2, называемыми гироскопическими силами.
На морских судах и винтовых самолётах имеется много вращающихся частей: вал двигателя, ротор турбины или динамомашины, гребные или воздушные винты и т.п. При разворотах самолёта или судна, а также при качке на подшипники, в которых укреплены эти вращающиеся части, действуют указанные гироскопические силы и их необходимо учитывать при соответствующих инженерных расчётах; величины этих сил могут достигать нескольких тонн, и, если крепления подшипников не будут должным образом рассчитаны, то произойдёт авария.
Теория Г. является важнейшим разделом
динамики
твёрдого тела, имеющего неподвижную точку. Перечисленные свойства Г. представляют собой следствия законов, которым подчиняется движение такого тела. Первое из свойств Г. с тремя степенями свободы есть проявление закона сохранения кинетического момента, а второе свойство — проявление одной из теорем динамики, согласно которой изменение во времени кинетического момента тела равно моменту действующей на него силы.
Гироскопы в технике.Применяемые в технике Г. выполняют обычно в виде маховичка с утолщённым ободом, весом от нескольких
Гдо десятков
кГ, закрепленного в кардановом подвесе. Чтобы сообщить Г. быстрое вращение, его делают ротором быстроходного электромотора постоянного или переменного тока. В авиации применяются Г. с ротором в виде воздушной турбинки, приводимой в движение струей воздуха. Иногда Г. выполняют в форме шара (шар-Г.) с подвесом на воздушной плёнке, образуемой подачей сжатого воздуха. В ряде конструкций применяют поплавковый Г., ротор которого заключён в кожух, плавающий в жидкости; этим разгружаются подшипники кожуха и значительно уменьшается момент трения в них.
Устройство конкретных гироскопических приборов основывается на тех или иных свойствах Г. с тремя или двумя степенями свободы. Свойство Г. с тремя степенями свободы неизменно сохранять направление своей оси в пространстве используется при конструировании приборов для автоматического управления движением самолётов (например,
автопилота
), ракет, морских судов, торпед и т.п. Г. в этих приборах играет роль чувствительного элемента, регистрирующего отклонение движущегося объекта от заданного курса. Одновременно прибор содержит следящую систему, улавливающую сигнал об отклонении, усиливающую его и передающую силовому устройству (мотору), которое и возвращает объект на заданный курс, обычно с помощью рулей. Второе свойство Г. с тремя степенями свободы — свойство прецессировать под действием приложенной силы — положено в основу Г. направления (курсового Г.) и важных навигационных приборов:
гирокомпаса
— прибора, определяющего направление географического меридиана, и гировертикали (или гирогоризонта) — прибора, определяющего направление истинной вертикали (горизонта).
При запуске ракеты необходимо с высокой степенью точности знать скорость её вертикального взлёта. С этой, казалось бы, очень трудной задачей, тоже легко справляется прецессирующий Г.
В гироскопических приборах часто используют и свойства Г. с двумя степенями свободы. К таким приборам относятся авиационный
указатель поворота
, а также некоторые виды
гиростабилизаторов
, в частности устройства для пространственной стабилизации объекта (например, искусственного спутника Земли). Подробнее о всех этих и др. устройствах см.
Гироскопические устройства.
Современная техника требует от многих гироскопических приборов очень высокой точности, что вызывает большие технологические трудности при их изготовлении. Например, у некоторых приборов при весе ротора порядка 1
кГдля обеспечения нужной точности смещение центра тяжести от центра подвеса не должно превышать долей микрона, иначе момент силы тяжести вызовет нежелательную прецессию (уход) оси Г. Кроме того, на точность показаний приборов с Г. в кардановом подвесе влияет трение в осях. Всё это привело к разработке Г., основанных не на чисто механических, а на других физических принципах (см. также
Квантовый гироскоп
,
Вибрационный гироскоп
).
Лит.:Николаи Е. Л., Гироскоп и некоторые его технические применения, М. — Л., 1947 (популярное изложение); Граммель Р., Гироскоп, его теория и применения, пер. с нем., т. 1—2, М., 1952; Булгаков Б. В., Прикладная теория гироскопов, 2 изд., М., 1955; Ишлинский А. Ю., Механика гироскопических систем, М., 1963.
С. М. Тарг.
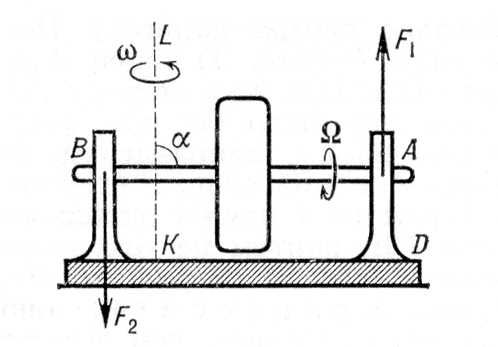 Рис. 8. Действие гироскопических сил на подшипники, закрепляющие ось, при повороте основания прибора вокруг оси KL.
Рис. 8. Действие гироскопических сил на подшипники, закрепляющие ось, при повороте основания прибора вокруг оси KL.
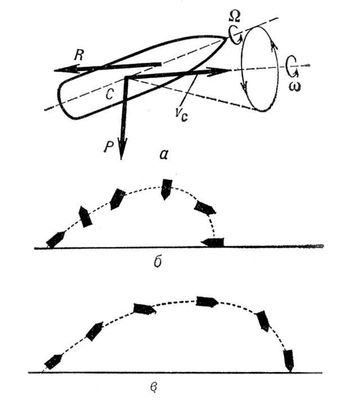 Рис. 6. а — прецессия артиллерийского снаряда; б и в — схемы движения снарядов и их траектории соответственно; б — для невращающегося снаряда; в — для вращающегося.
Рис. 6. а — прецессия артиллерийского снаряда; б и в — схемы движения снарядов и их траектории соответственно; б — для невращающегося снаряда; в — для вращающегося.
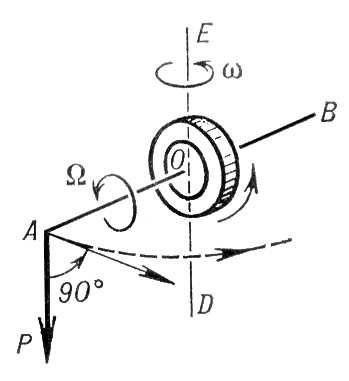 Рис. 4. Правило определения направления прецессии: глядя на ротор из точки приложения силы Р, надо установить, как вращается ротор — по ходу или против хода часовой стрелки. После этого мысленно повернуть вектор АР вокруг оси АВ на 90° в ту же сторону (т. е. по ходу или против хода часовой стрелки соответственно); тогда он и укажет направление прецессии (здесь — AD).
Рис. 4. Правило определения направления прецессии: глядя на ротор из точки приложения силы Р, надо установить, как вращается ротор — по ходу или против хода часовой стрелки. После этого мысленно повернуть вектор АР вокруг оси АВ на 90° в ту же сторону (т. е. по ходу или против хода часовой стрелки соответственно); тогда он и укажет направление прецессии (здесь — AD).
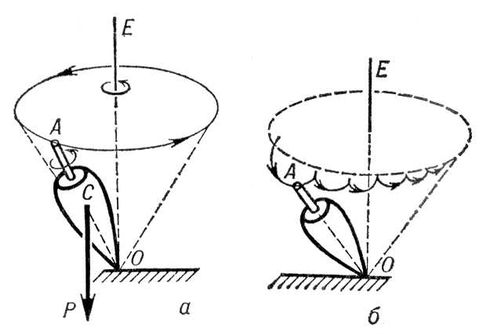 Рис. 5. а — прецессия волчка под действием силы тяжести; б — движение оси волчка при медленном собственном вращении.
Рис. 5. а — прецессия волчка под действием силы тяжести; б — движение оси волчка при медленном собственном вращении.
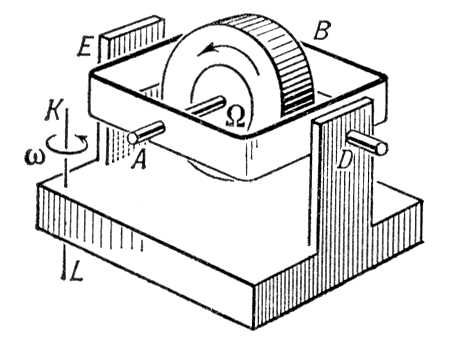 Рис. 7. Гироскоп с двумя степенями свободы.
Рис. 7. Гироскоп с двумя степенями свободы.
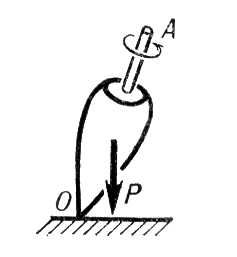 Рис. 1. Волчок; ОА — его ось, Р — сила тяжести.
Рис. 1. Волчок; ОА — его ось, Р — сила тяжести.
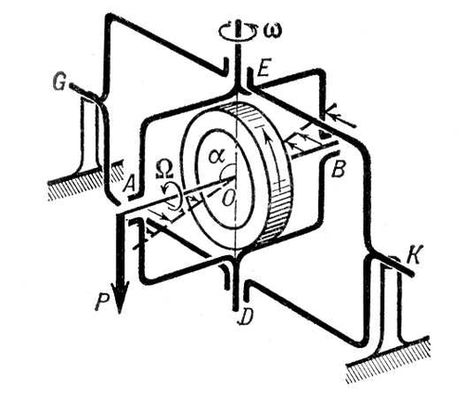 Рис. 3. Действие силы Р на гироскоп с вращающимся ротором; ось АВ движется перпендикулярно направлению Р.
Рис. 3. Действие силы Р на гироскоп с вращающимся ротором; ось АВ движется перпендикулярно направлению Р.
 Рис. 2. Гироскоп в кардановом подвесе. Ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE и вместе с рамкой 2 — вокруг оси GK; следовательно, ось ротора может занять любое положение в пространстве. О — центр подвеса, совпадающий с центром тяжести гироскопа.
Рис. 2. Гироскоп в кардановом подвесе. Ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE и вместе с рамкой 2 — вокруг оси GK; следовательно, ось ротора может занять любое положение в пространстве. О — центр подвеса, совпадающий с центром тяжести гироскопа.
гироскопическое устройство
для определения углов рыскания (изменения курса) и углов поворота объекта вокруг вертикальной оси. При согласовании Г. н. с плоскостью меридиана (например, по данным какого-нибудь компаса) он указывает текущее значение курса объекта. Г. н. представляет собой трёхстепенной астатический (уравновешенный)
гироскоп
, снабженный горизонтальной и азимутальной системами коррекции (см.
рис.
). Горизонтальная система коррекции, удерживающая внутреннее карданово кольцо
2(ось гироскопа
1) в плоскости горизонта, состоит из маятника-корректора
4, определяющего угол отклонения оси гироскопа от плоскости горизонта, и датчика моментов
5, прикладывающего к гироскопу соответствующие корректирующие моменты. Азимутальная система коррекции, удерживающая ось гироскопа в заданном азимутальном направлении (т. е. под заданным углом, например, к плоскости меридиана), состоит из датчика моментов
6и вычислительного устройства 7, вырабатывающего момент азимутальной коррекции. При этом учитываются поправки на вращение Земли и на движение объекта относительно Земли. Азимутальная коррекция Г. н. может также осуществляться от чувствительного элемента, обладающего избирательностью по отношению к стабилизируемому направлению, например от магнитной стрелки (см.
Гиромагнитный компас
). Потенциометр
8служит для съёма углов рыскания и поворота объекта вокруг вертикальной оси. Погрешности Г. н. характеризуются уходами оси гироскопа в азимуте, которые могут составлять от единиц до десятых долей градуса в час.
Г. н. используют для определения углов рыскания и поворота летательных аппаратов и кораблей, а также для кратковременного указания курса. Г. н. может применяться и как чувствительный элемент системы автоматической стабилизации курса объекта, например в
автопилоте
летательного аппарата, в автомате курса торпеды и др.
А. Ю. Ишлинский, С. С. Ривкин.
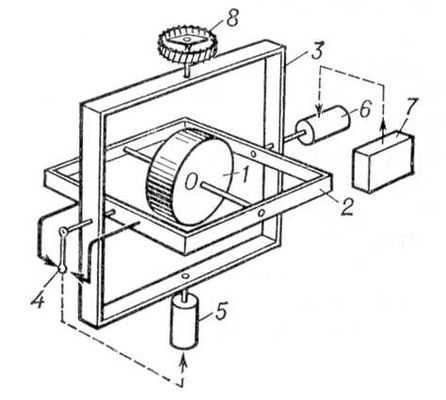 Принципиальная схема гироскопа направления: 1 — ротор; 2, 3 — внутреннее и наружное кардановы кольца; 4 — маятник-корректор; 5, 6 — датчики моментов; 7 — вычислительное устройство; 8 — потенциометр.
Принципиальная схема гироскопа направления: 1 — ротор; 2, 3 — внутреннее и наружное кардановы кольца; 4 — маятник-корректор; 5, 6 — датчики моментов; 7 — вычислительное устройство; 8 — потенциометр.