Страница:
.
гировертикали
.
гировертикали
.
компасом
состоят в том, что он указывает направление географического (а не магнитного) меридиана, что на его показания существенно меньше, чем на магнитный компас, влияют перемещающиеся металлические массы (железо, сталь) и электромагнитные поля и что его точность в условиях маневрирования и колебаний объекта значительно выше. Принцип действия Г. основан на использовании свойств гироскопа и суточного вращения Земли; его идея была предложена французским учёным Л. Фуко.
Гирокомпас Фуко представляет собой двухстепенной астатический
гироскоп
, ось которого перемещается в плоскости горизонта и благодаря возникающему из-за вращения Земли гироскопическому моменту стремится совместиться с плоскостью меридиана. Г. Фуко не нашёл применения на подвижных объектах, подверженных колебаниям, но его идея была использована при разработке некоторых образцов наземных Г.
На подвижных объектах широко применяются одно- и двухроторные Г., основанные на использовании трёхстепенных гироскопов.
В однороторном мореходном Г. используется трёхстепенной гироскоп, центр тяжести которого смещен в его экваториальной плоскости ниже точки подвеса, т. е. позиционный гироскоп. В зависимости от способа создания маятникового эффекта различают Г. с маятником, Г. с ртутными сосудами, Г. с косвенной коррекцией. В Г. с маятником (
рис. 1
) ротор
1заключён в гирокамеру
2, к нижней части которой подвешен груз
3. Гирокамера установлена в наружном кардановом кольце (на
рис.
не показано), ось вращения которого расположена вертикально. Когда ось
АВротора не находится в плоскости меридиана (отклонена на Восток или на Запад), она, стремясь в соответствии со свойствами трёхстепенного гироскопа сохранять своё направление по отношению к звёздам, будет вследствие вращения Земли отклоняться от плоскости горизонта (например, её конец
В, если он отклонен к Востоку, будет приподниматься, как бы следя за восхождением звёзд). Вместе с осью
ABбудет отклоняться и гирокамера
2с грузом
3относительно плоскости горизонта. В результате относительно точки подвеса возникнет момент силы тяжести, который вызовет прецессионное движение оси
АВк плоскости меридиана. В своём движении ось
АВ«проскочит» плоскость меридиана и тогда под действием момента силы тяжести она начнёт прецессировать в обратном направлении и т.д. После погашения этих
Аколебаний специальным демпфером ось
АВустанавливается в плоскости меридиана.
В Г. с ртутными сосудами (
рис. 2
) ротор
1и гирокамера
2отбалансированы так, что их общий центр тяжести совмещен с точкой подвеса. С гирокамерой связана система сообщающихся сосудов
3, частично заполненных ртутью. К правому сосуду прикреплена т. н. лапа
5, связывающая сосуды с гирокамерой. При отклонении оси гироскопа от плоскости горизонта избыток ртути в одном из сосудов обусловливает приложение к гироскопу момента силы тяжести, аналогичного соответствующему моменту в Г. с маятником.
В Г. с косвенной коррекцией используется трёхстепенной астатический гироскоп, на гирокамере которого установлен маятник (акселерометр), фиксирующий угол отклонения оси гироскопа от плоскости горизонта. На основании информации об этом угле в приборе формируются сигналы моментов коррекции, которые прикладываются к гироскопу с помощью соответствующих датчиков моментов, установленных на осях карданова подвеса гироскопа. Подобные приборы могут также работать в режиме гироскопа направления.
Из однороторных Г. применяются в основном Г. с ртутными сосудами.
Двухроторный Г. Чувствительный элемент этого Г. (
рис. 3
) — гиросфера, или поплавок, представляет собой полую сферу
1. В гиросфере помещены гироскопы
2и
3, гидравлический успокоитель для погашения собственных колебаний и др. элементы. Оси собственного вращения гироскопов
2и
3расположены горизонтально, а оси прецессии — вертикально и связаны с шарнирным механизмом спарником
4, который соединён пружинами
5с корпусом гиросферы. В исходном положении (при невращающихся роторах) оси гироскопов составляют с направлением
NSгиросферы равные углы
Е=45°. Центр тяжести гиросферы находится на её вертикальной оси ниже её геометрического центра, что обеспечивает, как и в однороторном Г., необходимый маятниковый момент. Гиросфера помещена в жидкость и поэтому в подвесе имеет место лишь вязкое трение. Для обеспечения невозмущаемости Г. ускорениями объекта параметры системы подбирают так, чтобы период прецессионных колебаний гиросферы при отсутствии затухания составлял 84,4
мин. Наличие в Г. двух гироскопов существенно снижает погрешности прибора при качке корабля. Погрешности Г. при прямом курсе и постоянной скорости хода корабля не превышают нескольких десятых долей градуса. Г. весьма широко распространены на кораблях морского флота.
Разновидность Г. — гирогоризонт-компас, предназначенный для определения курса корабля и углов отклонения его относительно плоскости горизонта.
А. Ю. Ишлинский, С. С. Ривкин.
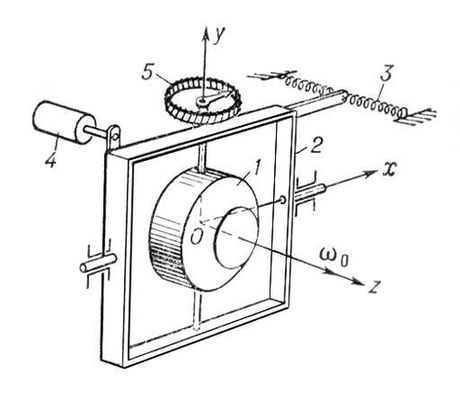
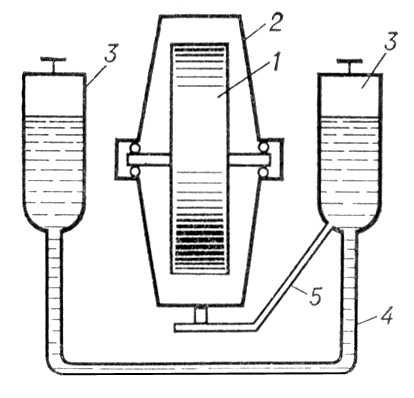 Рис. 2. Принципиальная схема чувствительного элемента однороторного гирокомпаса с ртутными сосудами: 1 — ротор; 2 — гирокамера; 3 — сосуды с ртутью; 4 — соединительная трубка; 5 — лапа.
Рис. 2. Принципиальная схема чувствительного элемента однороторного гирокомпаса с ртутными сосудами: 1 — ротор; 2 — гирокамера; 3 — сосуды с ртутью; 4 — соединительная трубка; 5 — лапа.
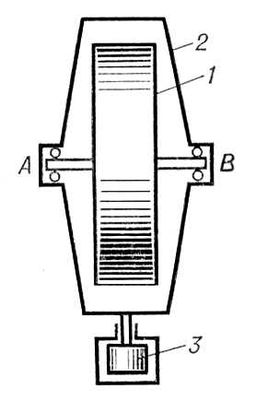 Рис. 1. Принципиальная схема чувствительного элемента однороторного гирокомпаса с маятником: 1 — ротор; 2 — гирокамера; 3 — груз.
Рис. 1. Принципиальная схема чувствительного элемента однороторного гирокомпаса с маятником: 1 — ротор; 2 — гирокамера; 3 — груз.
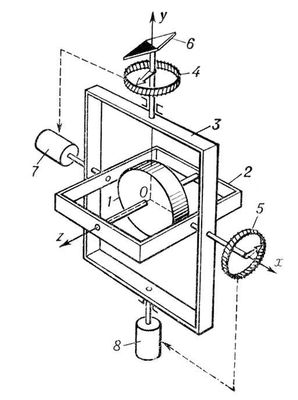
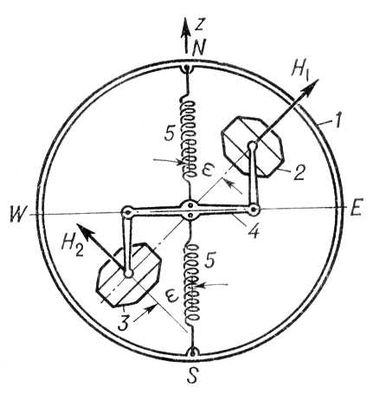 Рис. 3. Принципиальная схема чувствительного элемента двухроторного гирокомпаса. NS и WE — направления север — юг и восток — запад; H
1, H
2— кинетические моменты гироскопов; 1 — гиросфера; 2, 3 — гироскопы; 4 — спарник; 5 — пружины.
Рис. 3. Принципиальная схема чувствительного элемента двухроторного гирокомпаса. NS и WE — направления север — юг и восток — запад; H
1, H
2— кинетические моменты гироскопов; 1 — гиросфера; 2, 3 — гироскопы; 4 — спарник; 5 — пружины.